Na
primeira parte, descrevemos o processo de desenvolvimento de uma versão de teste de um módulo rangefinder subaquático. Chegou a hora de compartilhar informações sobre a segunda versão do módulo, uma vez que implementamos as alterações propostas no primeiro artigo.
Alteração 1: controle automático de ganho temporário (GAM).No processo de teste da primeira versão do módulo, o problema do desenrolar do sinal refletido de obstáculos localizados perto do emissor foi claramente descrito. Alguns comentaristas em uma postagem anterior recomendaram uma VARU. Sim, o uso de VARU foi muito apropriado. Agora, nos primeiros momentos após o envio de um pulso de sonda, é possível minimizar o ganho e aumentá-lo com o tempo.
A implementação do VARU é mostrada no esquema nº 1.
O DAC do microcontrolador gera uma voltagem aplicada à porta do transistor Q4.
Para o transistor aplicado, a característica da atenuação introduzida é obtida experimentalmente, dependendo da tensão no portão. Com base nessa característica e nos parâmetros ambientais especificados pelo usuário, é calculada uma tabela de valores, que é enviada via DMA ao DAC do microcontrolador.
De fato, o transistor, operando no modo linear, fecha parcialmente o sinal útil da saída do primeiro estágio do amplificador para o terra, regulando assim a amplitude do sinal que vai para os estágios subsequentes do amplificador.
 Mudança # 2: Boost converter para alimentar o estágio de saída.
Mudança # 2: Boost converter para alimentar o estágio de saída.Esquema número 2. Tudo é simples aqui. O conversor de impulso nos permite tornar o nosso emissor um pouco mais "alto". Você pode ajustar a tensão de alimentação do estágio de saída de 5 a 16 volts. Coisa útil para medições de longa distância.
Alteração nº 3: giroscópio / acelerômetro MEMS.Esquema número 3. Chip ICM20602 embutido. Isso permitirá obter não apenas informações sobre os níveis de reflexão dos objetos no caminho do raio, mas também a direção (ângulo) em que o módulo está olhando neste momento. Depois de fazer a digitalização mais simples do módulo (mesmo torcendo o módulo com a mão), você pode obter uma imagem realista do objeto de digitalização de acordo com o princípio de formação de imagem do lidar.
As alterações também devem incluir o uso de um amplificador MCP669-E / ML mais barato, mas não pior. Os drivers de porta também selecionaram o mais barato do TPS51604DSGR disponível.
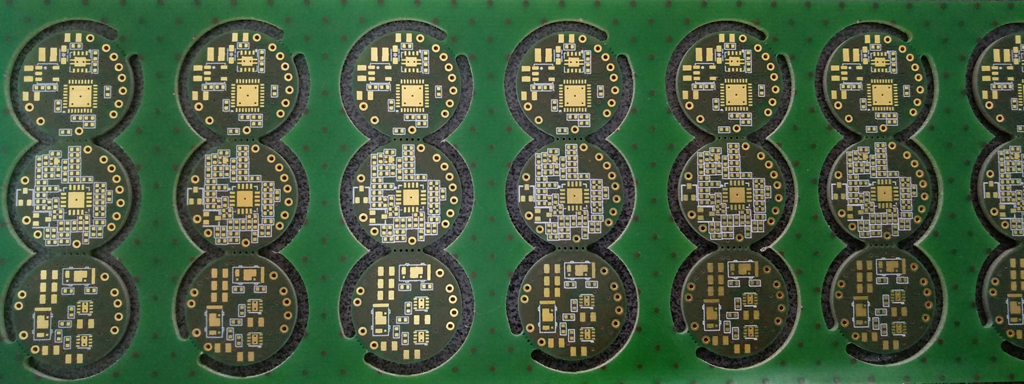
O formato das placas de circuito impresso é redondo, para uma colocação mais racional dentro da caixa de metal.
Para compactação e constância de características de cópia para cópia, o transformador é fabricado de acordo com a tecnologia plana.
O ferro está pronto. O que vem a seguir? A melhor hora dos programadores está chegando!
Embora a funcionalidade básica de baixo nível já tenha sido testada no trabalho (gerenciamento de drivers, trabalhando com ADCs, DACs etc.), você ainda precisa implementar uma interação conveniente com o host, criar e descrever em detalhes a API que dá acesso a todos os recursos do módulo. Deixe-me lembrá-lo de que escolhemos o UART como a interface física para esses fins. E aqui vale ressaltar que houve uma discordância na equipe sobre que tipo de protocolo vale a pena insistir: texto ou binário. Por um lado, o protocolo binário é velocidade, facilidade de processamento no lado do host. Por outro lado, o protocolo de texto facilita a análise da troca de dados (mesmo no Hyperterminal) e o uso de comandos / respostas de módulo significativos. Aqui está um pequeno exemplo de interação com o módulo usando comandos de texto no terminal Putty:
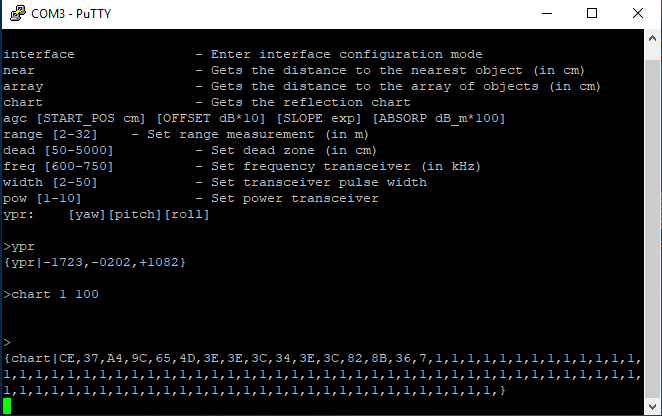
Pressionando a tecla TAB, uma lista de todos os comandos é exibida.
Um exemplo é o uso do comando YPR, que retorna o valor atual da direção do módulo ao longo de três eixos (ângulos de Euler).
O comando CHART retorna o valor do sinal refletido de objetos no caminho do pulso da sonda. Você pode definir a resolução da medida (até agora em centímetros) e o número de medidas.
Obviamente, o caso ideal é o suporte para ambas as versões do protocolo, tanto textuais quanto binárias. Infelizmente, porém, temos um tempo limitado e gostaríamos de direcionar imediatamente os esforços para uma opção mais aceitável para os usuários. Daí uma solicitação modesta: marque a opção de votação que seria mais conveniente para você.
Para o próximo artigo, tentaremos usar toda a funcionalidade do módulo para poder digitalizar objetos subaquáticos e obter uma imagem com os contornos desses objetos.
PSAs opiniões sobre o conteúdo do segundo artigo dentro da equipe foram divididas: seca, um pouco, mas agora, de forma capacitada, bonita, mas depois ... “Agora” venceu.
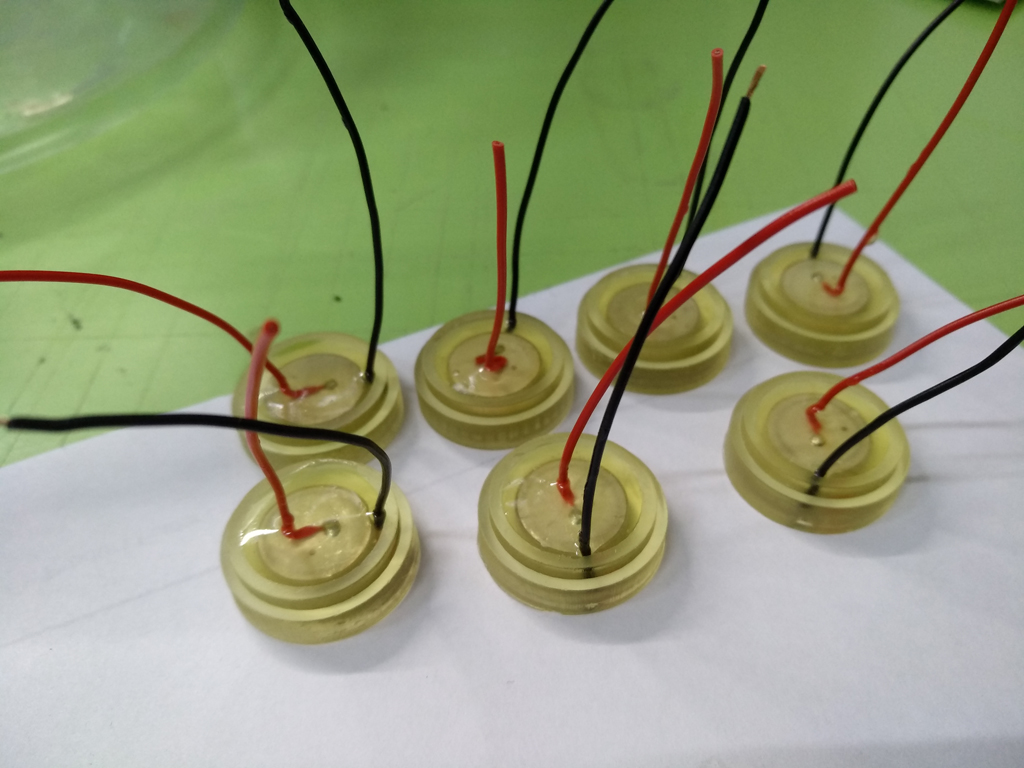
Diluiremos a secura do texto com algumas fotos que foram tiradas durante o processo de fabricação da segunda versão do módulo.
Montagem do emissor
Caixas metálicas usinadas

Caixas marcadas a laser

Montagem de placas modulares
