Olá pessoal! O desenvolvimento do hexapod está chegando à conclusão da primeira versão de combate e agora é hora de descrever todo o seu preenchimento eletrônico. Também adicionei o HC-SR04 para detectar os obstáculos que faltavam para a satisfação visual na aparência do hexapod. Haverá um pequeno vídeo novo e você terá a chance de me chutar eletronicamente.
Etapas do desenvolvimento:Parte 1 - DesignParte 2 - montagemParte 3 - CinemáticaParte 4 - trajetórias e sequências matemáticasParte 5 - EletrônicaParte 6 - transição para impressão 3DParte 7 - nova caixa, software aplicativo e protocolos de comunicaçãoVista com HC-SR04 instalado Inicialmente, o gabinete foi projetado para placas de controle e energia separadas, para que um seja colocado no centro do gabinete, mais próximo da bateria, e o segundo, para facilitar a depuração. E então vamos começar.
Unidade de controle
A unidade de controle é o "cérebro" do hexapod baseado no controlador SAM3X8E e consiste em duas placas: uma placa com um controlador e uma placa de distribuição. A placa com o controlador já está em uso (figura abaixo), mas a placa de distribuição terá que ser fabricada. Talvez no futuro eu solicite uma placa na fábrica com um local para o controlador remover o sanduíche.
O principal objetivo do quadro de distribuição é alimentar os dispositivos periféricos “leves”, o controlador e distribuir os sinais entre os pinos. Eu compilei uma lista dos meus requisitos para este fórum:
- Capacidade de instalação na placa HLK-RM04 (conversor UART-WIFI);
- Capacidade de conectar a tela I2C;
- Capacidade de conectar o HC-SR04;
- Capacidade de medir a tensão da bateria = tensão de alimentação da placa;
- Capacidade de medir tensão de alimentação periférica e HLK-RM04;
- Conecte o tweeter para indicar a descarga da bateria;
- Indicação LED do status do sistema: algo importante caiu (a configuração está incorreta ou outra coisa), algo sem importância caiu (visor, por exemplo), está tudo bem;
Tendo decidido um pouco sobre a base elementar e apreciando as possibilidades do meu óvulo com pó solto, comecei imediatamente a conectar a placa sem criar seu diagrama de circuitos. Funcionou pela primeira vez e não encontrei nenhum batente no trabalho. A fiação é a seguinte:
Ele fez as faixas especialmente largas, para que não houvesse problemas no processo de fabricação. Decidi fazer uma prancha com a LUT, que acabou bem com apenas 2 vezes. Sob o spoiler da foto para comparar as opções sem êxito e com êxito (à esquerda sem êxito, à direita com êxito).
Bem, tudo está de acordo com as instruções - enganamos o tabuleiro, fazemos furos e jogamos componentes. O resultado não demorou a chegar:
O HLK-RM04 é inserido no centro, um loop na placa de força é inserido no pente à direita e a energia é fornecida à esquerda. A voltagem na placa é medida por um simples divisor de voltagem. Durante uma operação de longo prazo (30 a 40 minutos), o regulador de tensão do HLK-RM04 aquece significativamente e eu apenas coloco um radiador.
Placa de potência
O consumo total de corrente (pico) dos inversores é de aproximadamente 30A (em média ~ 1,3A por inversor) sob carga pesada, ao caminhar 10-13A, em repouso - 5-6A. As medições foram realizadas empiricamente com um multímetro.
Decidi separar a energia para cada inversor com base em reguladores lineares de tensão, ou seja, 18 reguladores de tensão lineares - um para cada inversor. Como reguladores lineares são utilizados o LM317D2T-TR configurado para emitir 5V. Existem várias razões para usar 18 reguladores de tensão linear e, em princípio, usar reguladores:
- Você não pode conectar diretamente os inversores à bateria; para eles, a tensão de alimentação máxima permitida é de 6V;
- Independência relativa da velocidade \ esforços dos inversores em relação à tensão de entrada;
- Reguladores lineares são empilhados. Certa vez, comprei para eles um pacote de 70pcs no Ali (o item fez a maior contribuição para a solução);
- Não encontrei um regulador de tensão linear para essa corrente;
- Não encontrei um circuito DC-DC compacto e leve para essa corrente;
- A opção de conectar reguladores em paralelo é bastante duvidosa;
- A opção “regulador linear + transistor amplificador” priva o circuito de potência de todas as funções de proteção que o regulador linear fornece (pelo menos é assim que as pessoas escrevem e, neste caso, eu concordo com elas);
- Sou péssimo em projetar fontes de alimentação comutadas;
O quadro é muito simples e eu não comecei a desenhar um diagrama de circuito, e o desejo de ver rapidamente o resultado também se fez sentir. A fiação é a seguinte:
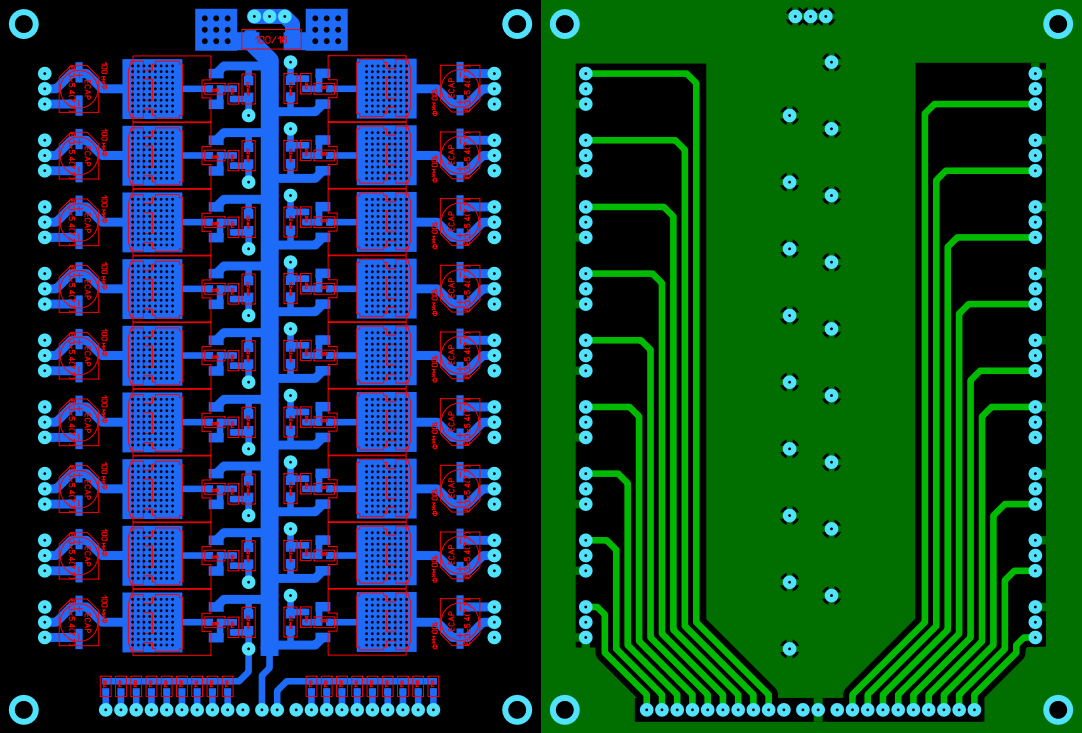
Acima, há almofadas de contato para fios de solda da bateria, abaixo do pente para um cabo e energia para a unidade de controle, e nas laterais estão unidades conectadas. Inicialmente, eu também queria tornar possível medir a quantidade de corrente consumida por cada servoconversor e medir a temperatura da placa, mas decidi não complicar ainda.
O conselho era simples e confiável, não há nada para quebrar. Realizou testes de carga com uma tensão de entrada de 11,1V (3S LiPo) e 7,4V (2S LiPo). Com uma tensão de entrada de 11,1V, como esperado, os controladores estavam muito quentes e a proteção de temperatura foi acionada durante a caminhada (o radiador não salvou e os controladores SMD também), o que me forçou a diminuir a tensão de entrada. Com uma voltagem de 7,4V, os reguladores estão quentes e com uma caminhada prolongada, a proteção não funciona mais - é disso que você precisa.
O conselho também produziu LUT e saiu muito bem da primeira vez. Infelizmente, há apenas uma fotografia da versão experimental do quadro, e eu realmente não queria tirar uma nova por cerca de 4 horas em algum lugar e realmente não queria desmontá-la para fins de fotografia (cerca de 70% do caso precisa ser desmontado). A diferença entre o antigo e o novo é apenas na ausência de buracos na linha central do tabuleiro (experimentos engraçados foram realizados).
Algum video
Teste de desempenho HC-SR04
A atitude do meu gato em relação ao hexapod