A noite de 11 de abril de 2019 foi o ponto de partida para o lançamento de um novo projeto, o "Bereshit 2.0", desde que o acidente do primeiro dispositivo privado ao tentar pousar na Lua enfureceu os engenheiros e a organização SpaceIL.
O espaço é cruel, e a lua não se permite sentar-se imediatamente. Mas com experiência e tecnologia moderna, cada nova tentativa se torna mais bem-sucedida.
Materiais publicados anteriormente sobre a missão Bereshit: Que sucessos foram alcançados pela missão Bereshit?Brevemente sobre a missão Bereshit: 8 anos de desenvolvimento, o projeto custou US $ 100 milhões, 200 cientistas e engenheiros voluntários, 47 dias de vôo e mais de 6,5 milhões de quilômetros foram superados, no início de 380 kg de combustível, um motor LEROS 2b acelerado, 6 câmeras laterais , um magnetômetro, um conjunto de refletores de canto a laser e uma tentativa de pouso, em que um aparelho de 150 kg com 76 kg de combustível (hidrazina) em tanques de alta velocidade, voando longe da zona do pouso planejado, caiu na superfície da lua.
O aparelho Bereshit estava em órbita da Lua e usou um magnetômetro durante o pouso e transmitiu ao MCC alguns dos dados científicos sobre o campo magnético da Lua.
Agora Israel é o 7º país que lançou sua espaçonave em órbita da Lua (e a manteve lá por 7 dias).A lista de países (seus primeiros dispositivos são contados) com dispositivos em órbita da lua:1. Luna-10, URSS, 1966;
2. Lunar Orbiter 1, EUA, 1966;
3. Hagoromo, Japão, 1990;
4. SMART-1, SEC, 2005;
5. Chang'e-1, China, 2007;
6. Chandrayan-1, Índia, 2008;
7. Bereshit, Israel, 2019.
E, no entanto, agora Israel é o sétimo país que lançou sua espaçonave na superfície lunar (embora durante o processo de pouso, que se transformou em um acidente fatal incontrolável).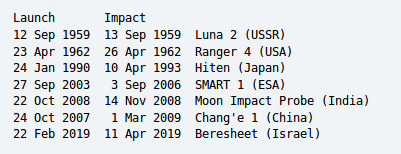
Supõe-se que o diâmetro da cratera formada após a queda de 3 a 5 metros. O aparelho Bereshit colidiu com a superfície lunar em um pequeno ângulo (~ 8 °), a cratera pode ser alongada.
O custo dos componentes do dispositivo Bereshit (
foto tirada aqui ):

As principais características da missão e o veículo lunar "Bereshit":- início da missão: 22 de fevereiro de 2019;
- fim da missão: colidiu com a superfície da lua na fase final de pouso em 11 de abril de 2019;
- a trajetória do movimento para a Lua (de fato, o máximo possível): complexo, mutável, executando uma série de manobras (ligando os motores por alguns segundos ou até minutos) para aumentar o apogeu de seu estofamento elíptico após cada órbita ao redor da Terra;
- a altura do aparelho Bereshit é de cerca de 1,5 metros, um diâmetro de 2 metros (2,3 metros entre os suportes de aterrissagem);
- peso 530 kg com combustível (peso combustível - 380 kg), 150 kg sem combustível;
- motor principal: modificação do LEROS 2b;
- O principal elemento do computador de bordo: o processador dual-core Gaisler HiRel GR712RC;
- Seis câmeras de 8 megapixels Imperx Bobcat B3320C com óptica Ruda;
- instrumentos científicos: magnetômetro, conjunto de refletores de canto a laser.
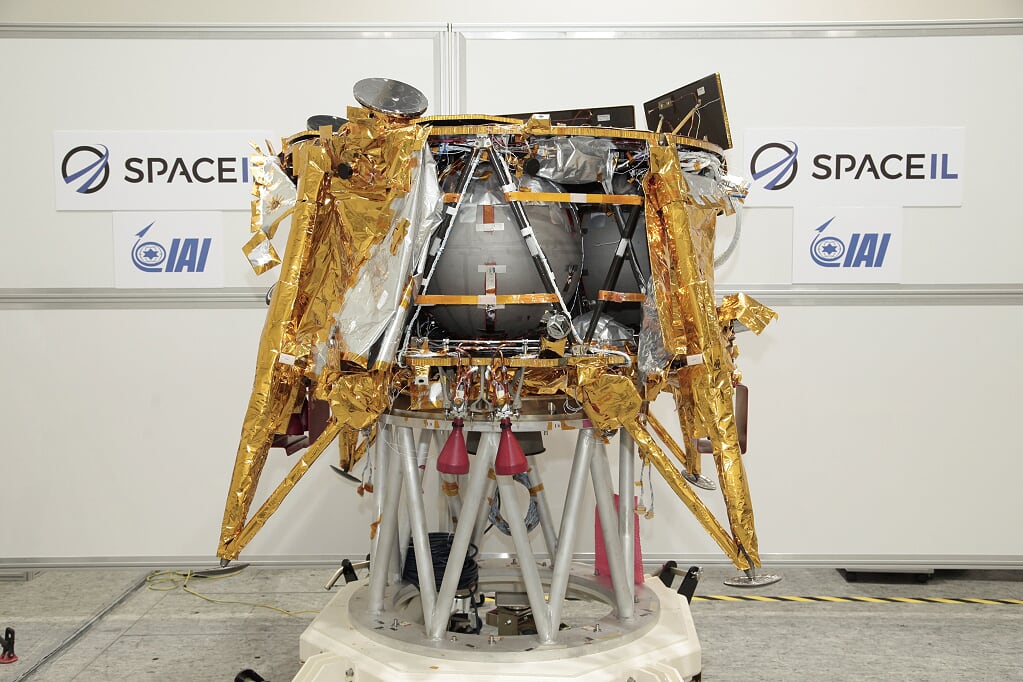
O dispositivo Bereshit foi desenvolvido por organizações SpaceIL, que são apoiadas principalmente por investidores privados, incluindo o magnata americano Sheldon Adelson e o bilionário Morris Kahn, que também são co-fundadores da Amdocs (DOX), uma das maiores empresas de Israel.
É impossível enviar o aparato lunar ao espaço pelas forças e meios de apenas uma pequena empresa privada, mas com a ajuda da comunidade espacial internacional, você pode transformar a ideia em um projeto completo que está sendo implementado atualmente.
Participantes do projeto envolvidos na missão Bereshit:- Uma equipe de jovens cientistas e engenheiros israelenses da SpaceIL,
- NASA (EUA),
- ISA (Agência Espacial Israelita),
- IAI (preocupação da indústria de aviação de Israel),
- Spaceflight Industries (EUA, organizador do lançamento do aparelho Bereshit em órbita),
- empresa SpaceX (EUA, foguete de reforço Falcon 9),
- Swedish Space Corporation (Swedish Space Corporation),
- empresa Cobham (Suécia),
- empresa Ramon Chips (Israel).

Afinal, o SpaceIL é uma pequena organização de acordo com os padrões mundiais, emprega cerca de 200 pessoas e a maioria são cientistas e engenheiros voluntários que "procuram promover o desenvolvimento do progresso tecnológico e científico em Israel".
O que aconteceu durante o pouso do dispositivo Bereshit em 11 de abril de 2019?De fato, os problemas com o dispositivo Bereshit começaram quase imediatamente após o lançamento.
Fevereiro 2019:
Iluminar os sensores da posição do dispositivo (os sensores eram muito sensíveis a esse "deslumbramento"), o que pode afetar a orientação do dispositivo no espaço.
Solução: foi realizada a compensação do software para processar os dados dos sensores e reduzir sua sensibilidade. Foram feitas várias verificações adicionais de novos dados dos sensores do dispositivo.No estágio de preparação, antes de executar a segunda manobra para ligar os motores, o computador de bordo Bereshit reiniciou inesperadamente e o estágio de execução da manobra foi automaticamente cancelado. Os engenheiros do SpaceIL e IAI começaram a analisar a situação.
Havia um problema a bordo que limitava a capacidade de manobra do dispositivo.
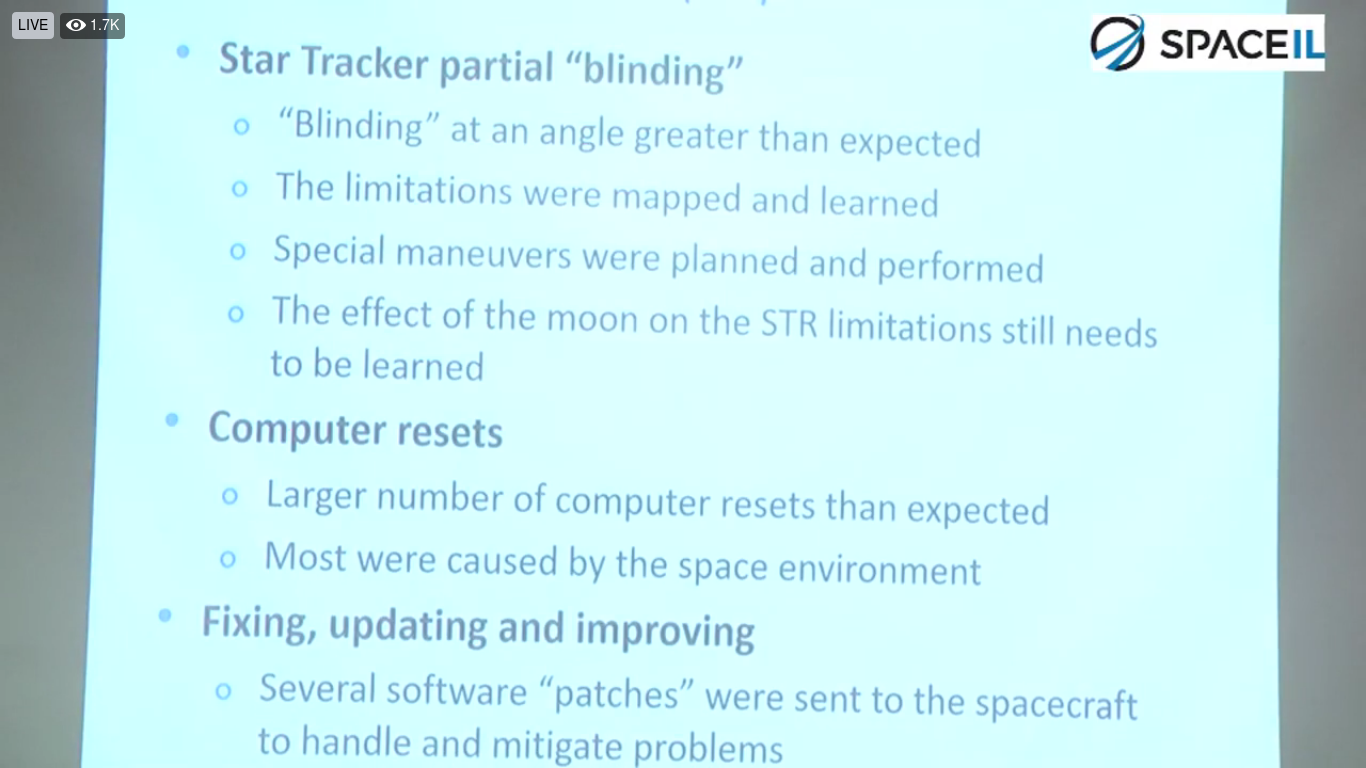
Solução: Os engenheiros da SpaceIL e IAI corrigiram a falha no sistema de computador do dispositivo Bereshit, agora o dispositivo Bereshit continua seu vôo para a Lua no modo normal.Além disso, o SpaceIL não anunciou novas avarias ou problemas com o aparelho Bereshit ; no entanto, antes das manobras lunares, o relatório apresentava um slide em que havia mais de uma reinicialização / falha no trabalho do BC - vários e até mais do que os engenheiros esperavam e por causa do ambiente hostil do espaço.
Problemas e soluções que estavam no espaço (verifica-se que houve muitas reinicializações do BC):
Assim, seria de esperar que, após 1128 horas de voo (47 dias), os problemas com os componentes internos do dispositivo Bereshit pudessem se tornar fatais, e sua correção é impossível se os elementos falharem ou funcionarem anormalmente sob carga pesada e a influência do ambiente espacial.
O pouso do dispositivo na Lua é um processo complexo no qual o computador de bordo executa uma grande quantidade de tarefas: controlar os modos de operação dos motores, analisar a telemetria e os dados dos sensores (posição, altitude, velocidade, pouso etc.), ajustar a posição atual do dispositivo de acordo com o caminho de pouso e coordenadas reais, consumo de combustível adaptável, transmissão de dados usando um sistema de comunicação.
E se ocorrer uma situação de emergência com um ou mais sensores durante o pouso, esse momento poderá ser compensado automaticamente se houver um circuito de backup ou reiniciando (reiniciando) o sistema de computador de bordo, se houver tempo para esse processo.
No modo manual e em tempo real, os engenheiros do centro de controle não controlavam o aparelho Bereshit, o computador de bordo pousava, depois que o aparelho saía do "ponto sem retorno", quando era necessário apenas executar o procedimento de pouso, cujos comandos eram recebidos anteriormente pelo computador de bordo.
Mas, para levar em conta a situação e compensar os problemas quando vários elementos falham em cascata e, devido a suas falhas, os principais componentes do dispositivo (motores, sistemas de telemetria, computador de bordo) serão desligados - isso também é difícil para um aparelho desse nível (sem sistemas de controle redundantes). ), como a prática demonstrou, é impossível.
O que mais se sabe sobre os componentes de hardware e software do dispositivo Bereshit- um (1) motor axial 430N e oito (8) motores axiais 25N. Motores de manobra foram usados no pouso para ajudar o principal;
- A temperatura da eletrônica é mantida na faixa de -10 ° C a + 40 ° C. A maior parte da eletricidade é gasta no aquecimento dos eletrônicos (sem sistema de refrigeração);
- o computador de bordo é um (1), não duplicado;
- o sensor estrela para orientar o dispositivo Bereshit está equipado com um cone preto para absorver os raios de terceiros; no entanto, quando o dispositivo Bereshit foi separado dos satélites após o início, verificou-se que o cone estava sujo, os engenheiros lidaram com esse problema, descobrindo quais ângulos de reflexão não ocorreram e introduziram ajustes no algoritmo do software para processar dados do sensor (usando patches de software);
- houve várias reinicializações do computador durante o vôo para a lua;
- controle o código do programa, comandos e trabalhe com o computador de bordo - na linguagem C;
- devido ao fato de haver apenas um computador, na reinicialização, todas as atualizações (patches) são apagadas e precisam ser baixadas adicionalmente novamente no sistema;
- baixa velocidade de transferência de dados: uma foto de alta resolução (de uma câmera de 8 Mpx) carrega 40 minutos;
- O DLR (Centro Aeroespacial Alemão) testou o mecanismo de pouso da espaçonave Bereshit.
Equipe SpaceIL: A maioria deles são engenheiros aeronáuticos e físicos. Mas há alguns membros mais jovens que foram treinados pela unidade de operações via satélite da IDF.
Sistemas de hardware Bereshit, cuja falha pode levar à execução anormal das etapas do procedimento de pouso e uma queda:
O mecanismo do dispositivo Bereshit.O motor do aparelho Bereshit é uma unidade de mísseis químicos especialmente adaptada (para a missão Bereshit, foi modificada diminuindo o bico e aumentando a pressão) da família LEROS (para uso em plataformas de satélite) - modificação LEROS 2b na hidrazina (monometil-hidrazina) com um impulso de 45 kgf (441H), que é um pouco mais do que suas características regulares em 41,5 kgf (407H).

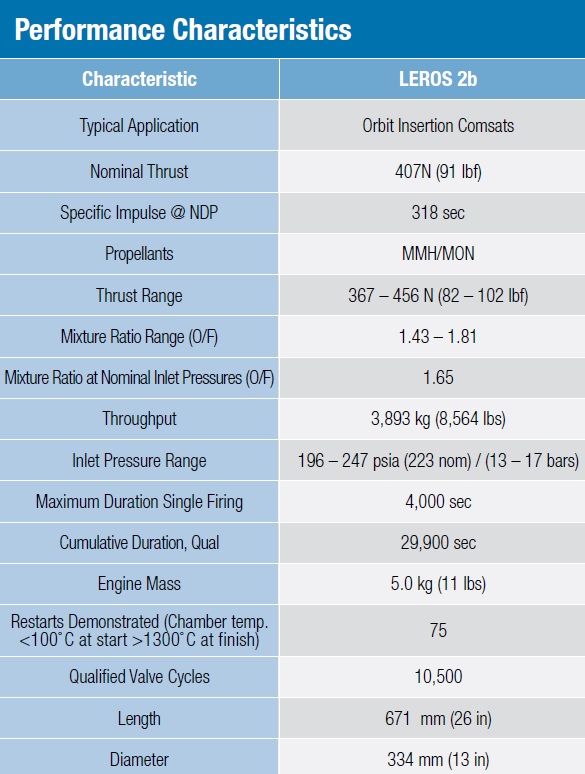
Supõe-se que esse mecanismo não foi projetado para várias partidas e não é acelerado, embora durante a missão Bereshit houvesse várias partidas do mecanismo principal por vários minutos e durante o pouso, dezenas de minutos.
O empuxo total dos motores de manobra é 8 * 25H = 200H (metade do principal). Ou seja, quando o motor principal é desligado, o impulso diminui três vezes, o que foi observado durante o pouso.
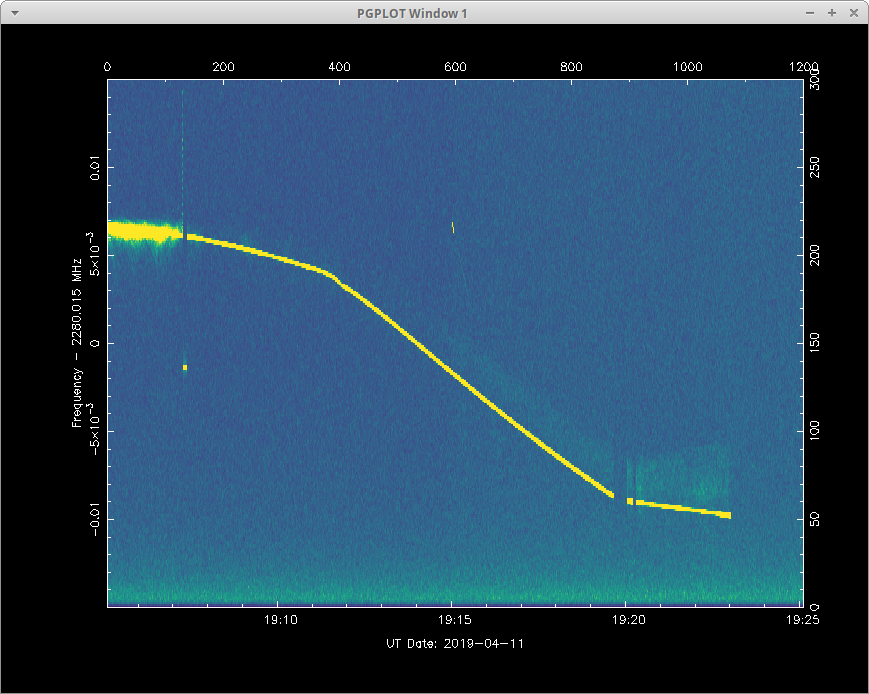
As paradas do motor durante o pouso também foram registradas:
A curva Doppler da queda-pouso do aparelho Bereshit, por volta das 19:19, a frenagem quase parou:
 Computador de bordo.
Computador de bordo. Processador HiRel GR712RC da Cobham Gaisler
Processador HiRel GR712RC da Cobham GaislerComo elemento principal do computador de bordo, o equipamento Bereshit usa o
processador Gaisler HiRel GR712RC da Cobham,
de núcleo duplo .
Tecnologicamente, o chip é baseado em LEON SPARC e é fabricado usando uma tecnologia exclusiva de silício resistente à radiação.
O SpaceIL se tornou o
primeiro cliente deste processador e os engenheiros do SpaceIL escreveram um software especial para ele antes mesmo da entrega real e executados no dispositivo Bereshit.
O GR712RC é um processador de núcleo duplo LEON3FT SPARC V8 . Pode operar em frequências de até 125 MHz em toda a gama de frequências militares. Isso fornece até 300 DMIPS e 250 MFLOPS de desempenho máximo. Integra protocolos de interface avançados, incluindo SpaceWire, CAN, SatCAN, UART, 1553B, Ethernet, SPI, I2C, GPIO e outros. Possui barramentos de interface de alta velocidade para memória externa SDRAM / SRAM / PROM / EEROM / NOR-FLASH. Resistência comprovada à radiação - até 300 graus. Baixo consumo de energia.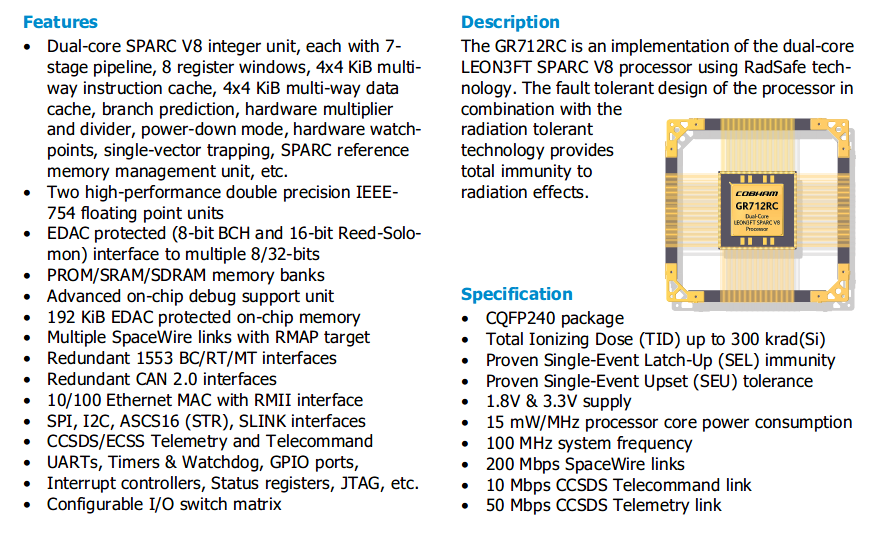

De acordo com dados atualizados - esse processador é fabricado com a tecnologia comercialmente disponível mais comum (TowerJazz 180 nm, fabricada em Israel), aproximadamente a mesma que os controladores de chaleiras elétricas. Garantir alegria sem interferir na tecnologia, devido ao circuito e à topologia dos elementos, que custam um pedido ou dois mais barato do que se o processo de fabricação fosse desenvolvido especificamente.
O computador de bordo do aparelho Bereshit já havia reiniciado várias vezes antes do pouso devido à influência do ambiente espacial (radiação, temperatura).
TT&C.O sistema de rastreamento, telemetria e subsistema de comando (TT&C - subsistema de rastreamento, telemetria e comando) usado neste projeto “travou” duas (2!) Vezes na etapa final de pouso, embora seu status fosse “OK”
Sensores e elementos do sistema do dispositivo Bereshit na janela de dados de telemetria:
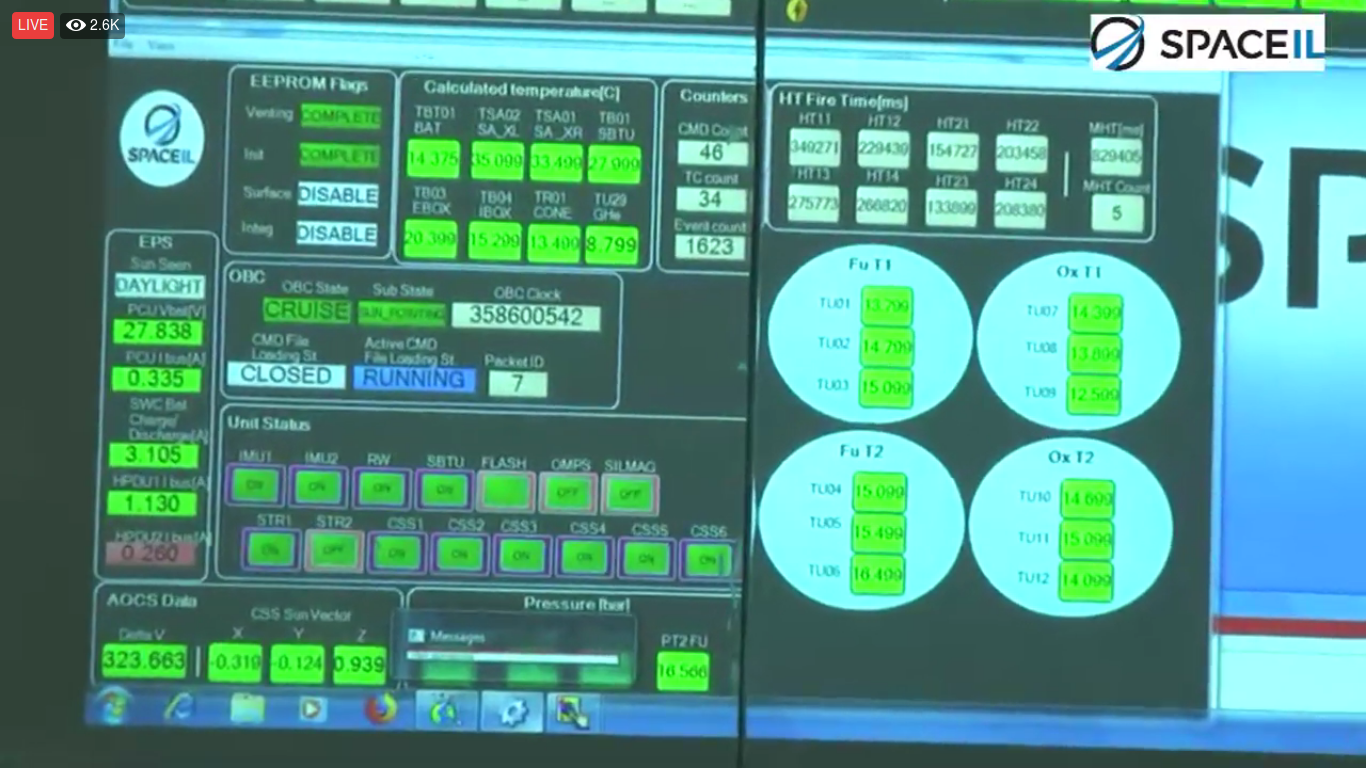
Como o sistema de telemetria estava pendurado:


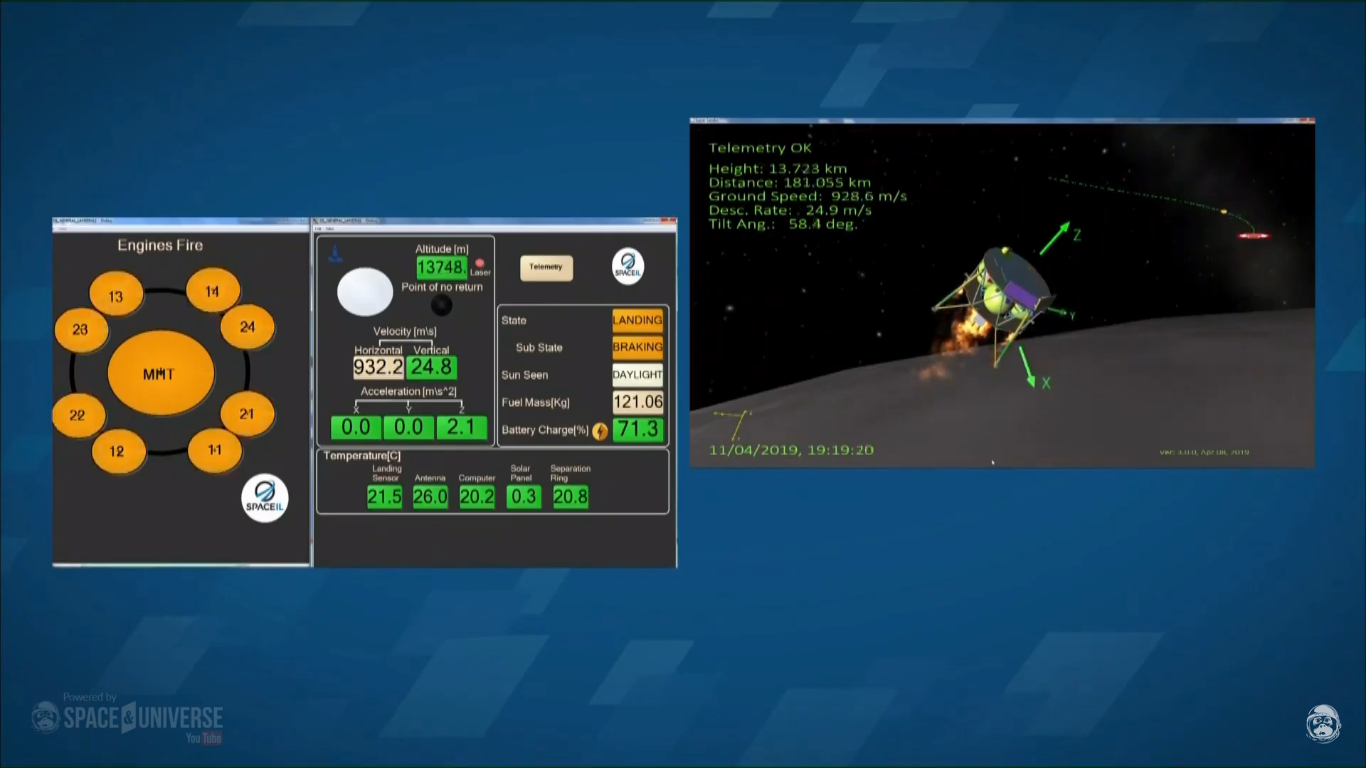
Aqui está o que os engenheiros da MCC viram ao pousar, de acordo com dados de telemetria:
Modo de pouso normal:
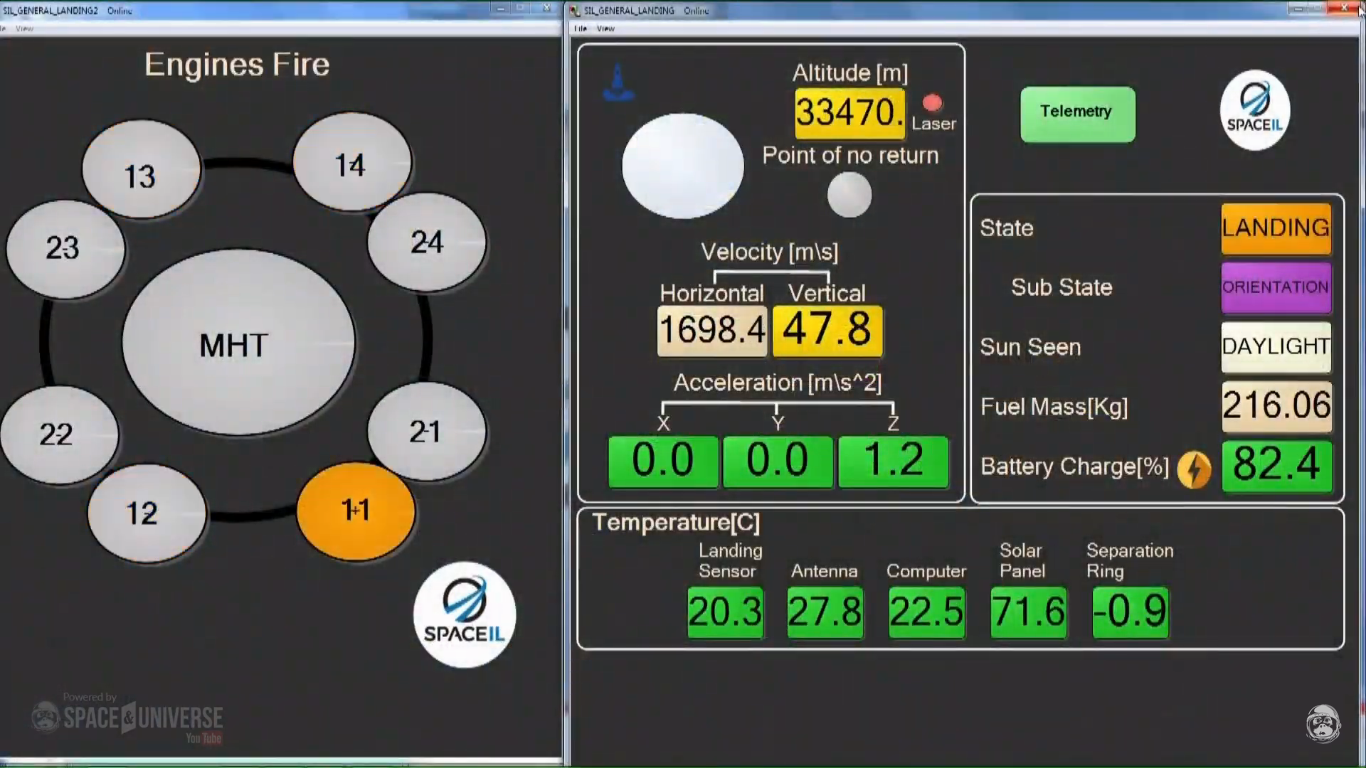
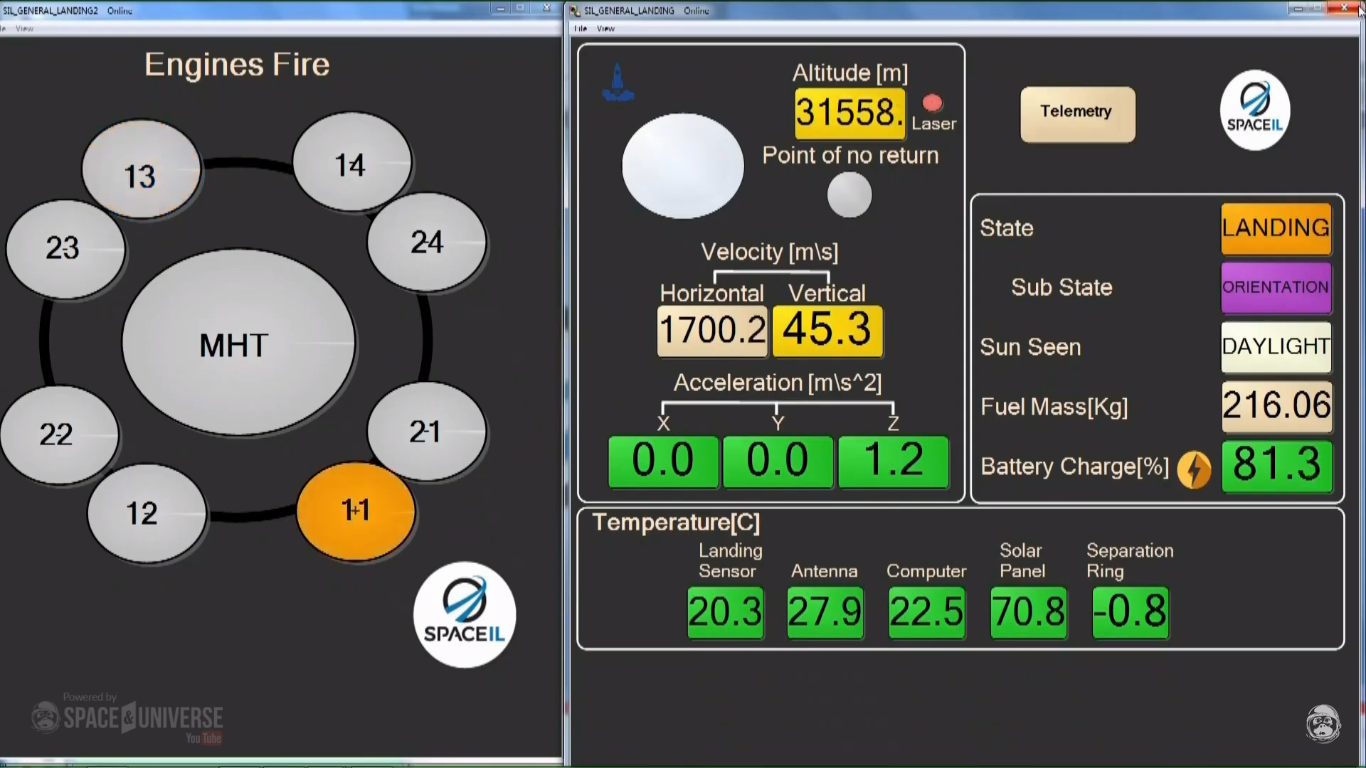

E aqui, os problemas já começaram com o desligamento do motor, o "congelamento" dos dados de telemetria e as leituras de velocidade anormais, que em alturas de projeto devem ser completamente diferentes.






23:03 O indicador de telemetria fica verde. Subestado é orientação.
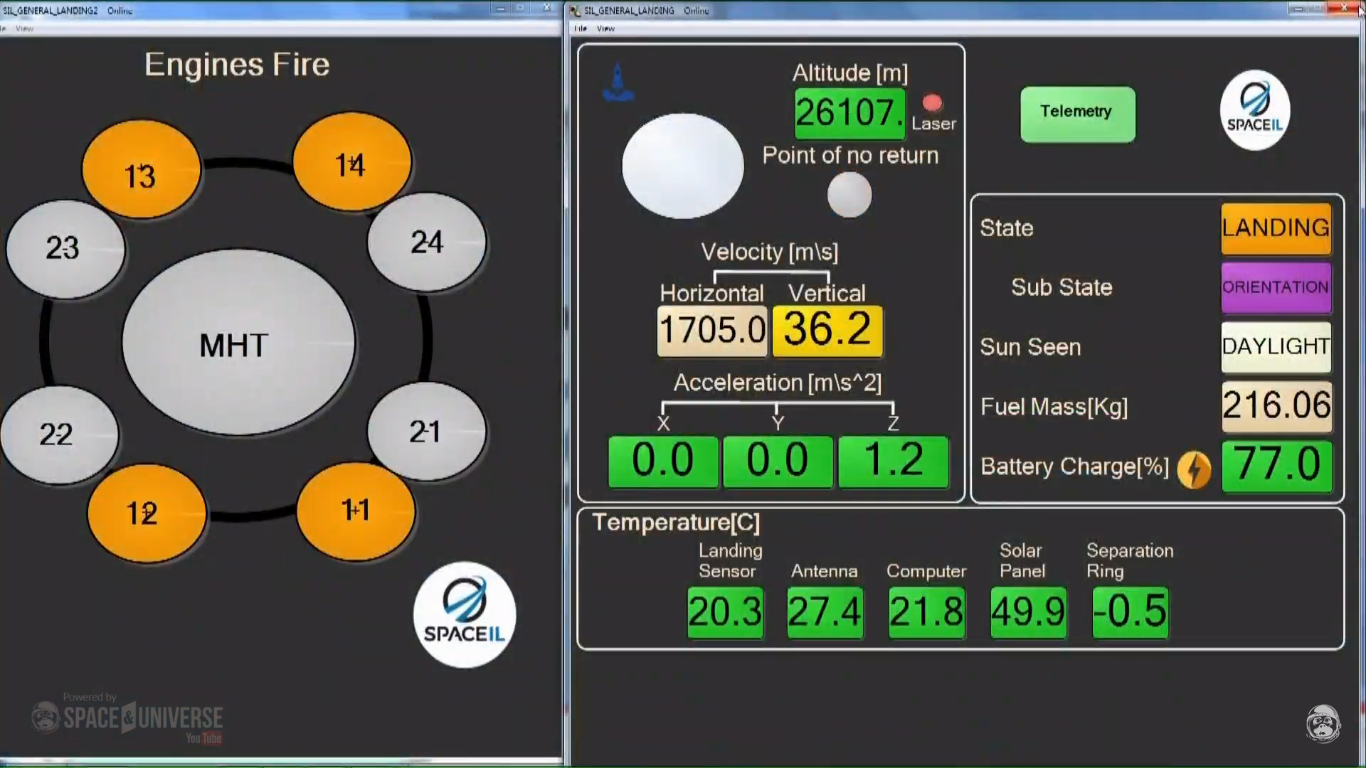
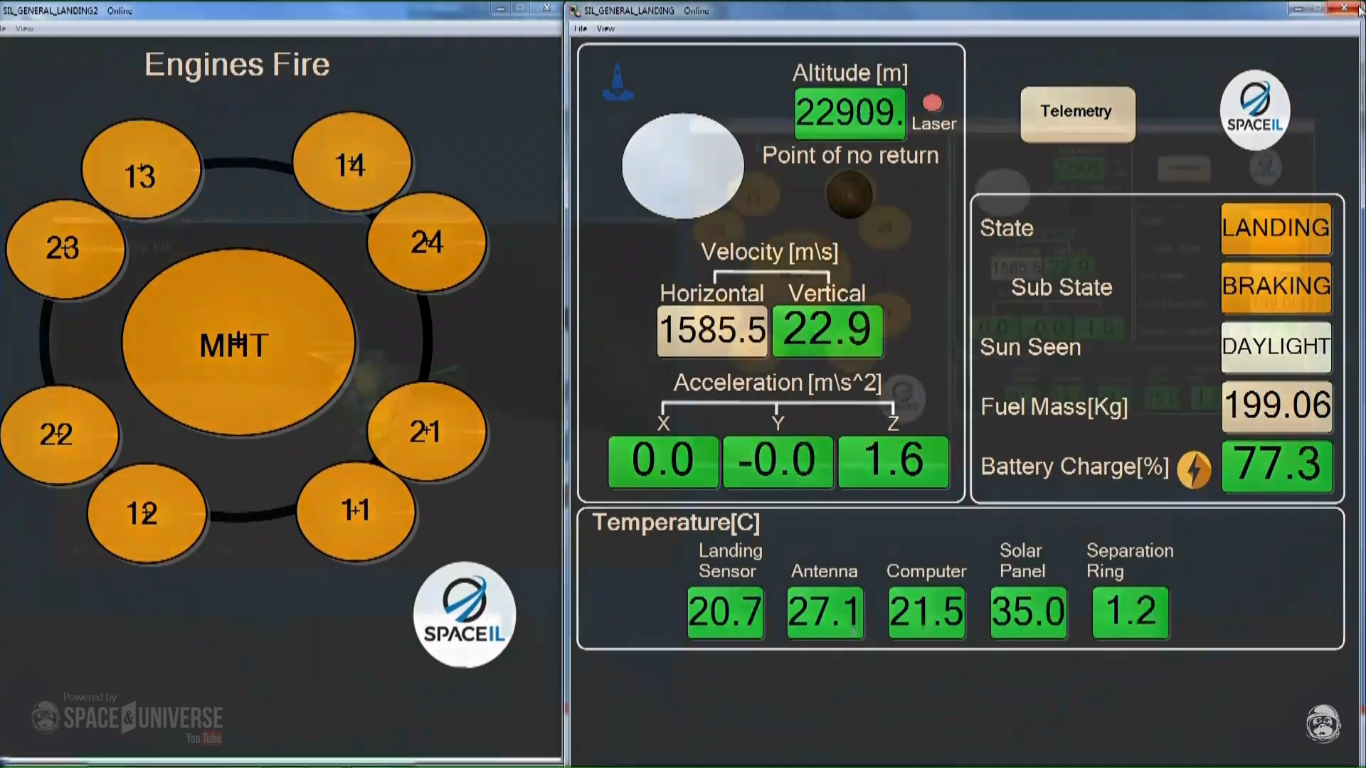
25:04 Subestado muda para Frenagem.
25:20 "Passamos o ponto sem volta."
25:26 O indicador Ponto sem retorno fica preto.
25:52 A exibição da velocidade vertical fica verde.
28:16 O indicador de telemetria não está mais verde.
28:20 O indicador de telemetria fica momentaneamente verde, depois não fica mais verde.
29,37 A distância é mostrada como 210 km.
29:50 A distância muda para 385 km.
30:03 A distância muda para 370 km.
30:40 O indicador de telemetria está verde.
30:51 A distância é 314 km.
31:33 O Beresheet selfie é mostrado. Altitude aproximadamente 22 km ??? A telemetria é verde.
31:50 O indicador de telemetria não está mais verde.
31:55 a 32:29 "[inaudível] mate". "[Conversa de missão mais inaudível] ocupada."
32:48 É exibida a tela de telemetria. O indicador de telemetria está amarelo claro. A altitude é 14095 m. A velocidade horizontal é de 955,5 m / s. A velocidade vertical é de 24,8 m / s. O motor principal está ligado. A velocidade horizontal é amarela clara. Outros parâmetros são verdes, exceto o indicador de telemetria.
32:49 Todos os motores estão ligados.
32:51 Todos os motores estão desligados.
32:55 O motor principal está ligado.
32:57 Todos os motores estão ligados.
32:59 O motor principal está ligado. Distância é 183,8 km.
33:01 - 33:03 "IMUstein não está bem."
33:02 Todos os motores estão ligados.
33:05 O motor principal está ligado.
33:07 Todos os motores estão ligados.
33:09 O motor principal está ligado.
33:11 Todos os motores estão ligados.
33:13 O motor principal está ligado.
33:16 Todos os motores estão ligados.
33:20 O indicador de telemetria fica verde. Todos os motores estão desligados. Todos os monitores permanecem estáticos (sem alteração).
33:32 O indicador de telemetria não está mais verde. Todos os motores estão desligados. Todos os monitores permanecem estáticos (sem alteração).
34:24 O indicador de telemetria fica verde. Todos os motores estão desligados, mas supostamente ligados. A aceleração vertical no eixo Z é fixada em 0,6. "Atualmente, temos um problema em uma de nossas unidades de medição inercial". A velocidade vertical começa a aumentar constantemente. A altitude continua a diminuir constantemente. A aceleração vertical no eixo Z fica fixa em 0,6. O motor principal provavelmente não está ligado.
O indicador de telemetria fica intermitentemente verde e depois fica amarelo claro, até o seguinte registro de data e hora do vídeo.
34:56 O indicador de telemetria não está mais verde. Embora todos os motores sejam mostrados como ligados, a velocidade vertical continua a aumentar. A aceleração vertical no eixo Z permanece fixa em 0,6. O motor principal provavelmente não está ligado.
36:25 - 36:33 “Parece que temos um problema com nosso mecanismo principal. Estamos redefinindo a espaçonave para tentar ativar o mecanismo ".
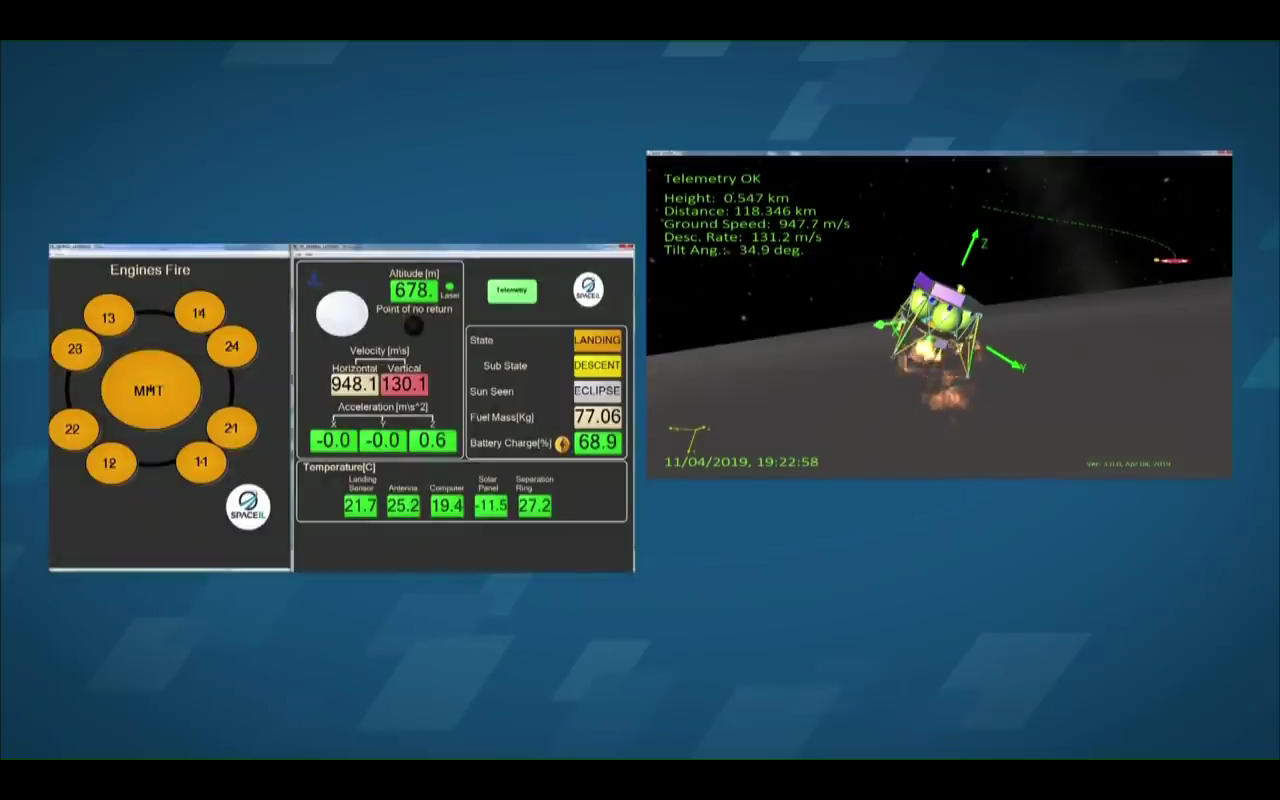
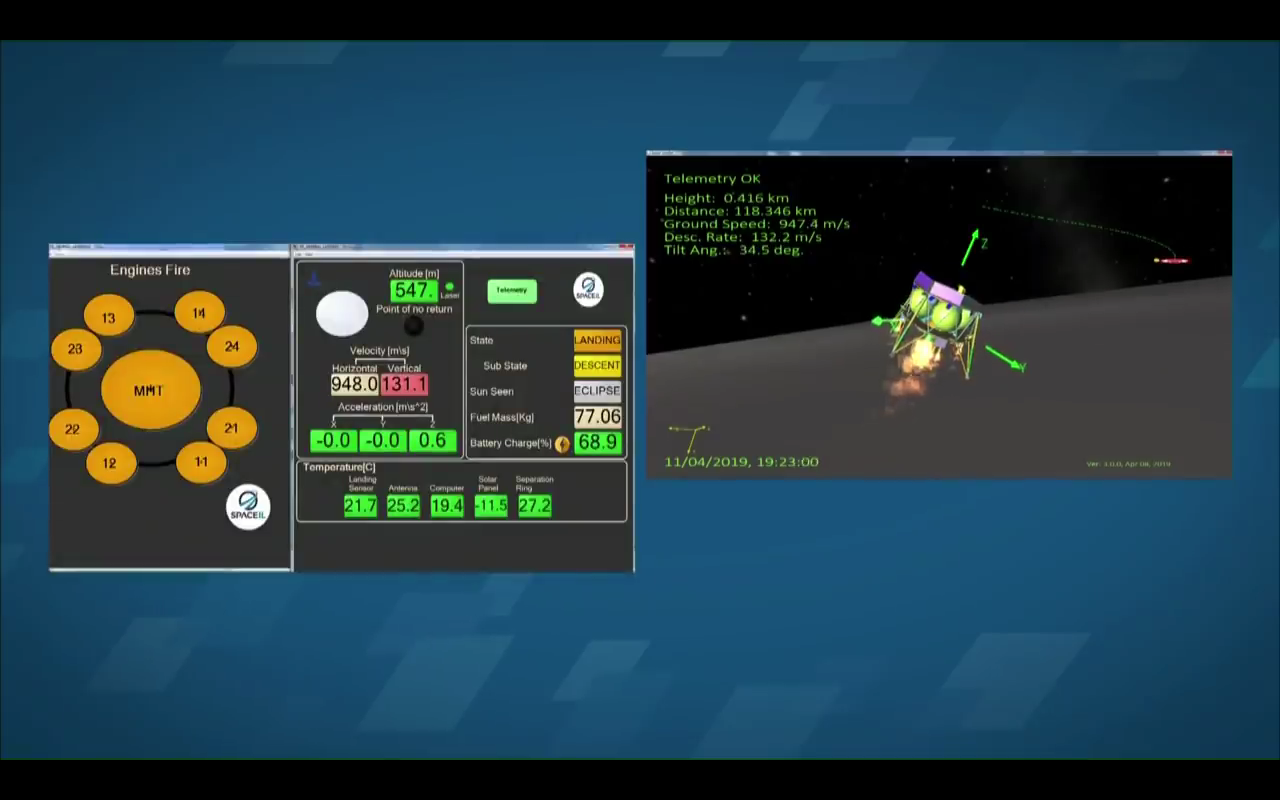
36:40 O indicador de telemetria está verde. Todos os motores parecem estar ligados, mas a aceleração do eixo Z permanece fixa em 0,6 m / s. Altitude é de 678 metros. As velocidades horizontal e vertical são 948,1 m / se 130,1 m / s, respectivamente.
36:44 Últimos dados de telemetria. O indicador de telemetria está verde. Todos os motores parecem estar ligados. A aceleração do eixo Z muda para 0,7 m / s. A altitude final é de 149 metros. As velocidades horizontais e verticais finais são 946,7 e 134,3 m / s, respectivamente. O motor principal não parece estar funcionando corretamente.
Os últimos 4 segundos da vida útil do dispositivo, de acordo com os dados da MCC (redução de 678 a 149 metros):
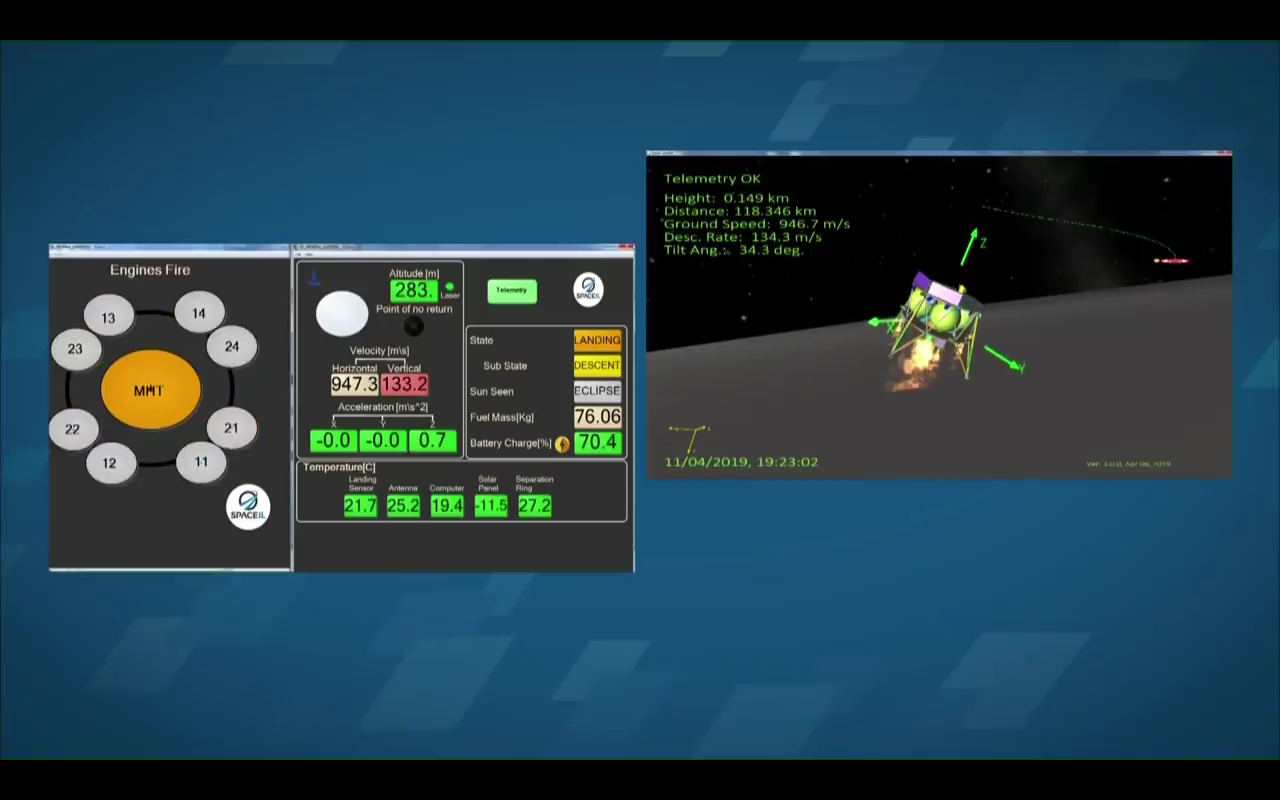

Às 19:23, os dados de telemetria deixaram de chegar completamente.
Anteriormente - os problemas começaram a uma altitude de 14 km, o motor principal desligou durante o pouso e, após reiniciar, era tarde demais - o dispositivo não conseguiu frear corretamente, esse mau funcionamento levou a uma forte queda em alta velocidade e de uma altura de 150 metros para a lua.
Unidade de orientação inercial (unidade de medida inercial - IMU1, IMU2) - os nós são duplicados.Mas isso é interessante, já que aqui foram utilizados dois blocos e seus dados foram muito importantes para o computador de bordo.
Já antes, devido às falhas de tais módulos, houve acidentes - como no aparelho Schiaparelli em Marte em 2016.
Verificou-se que ocorreu um erro fatal na operação do software Skiaparelli devido a problemas na operação do "Inertia Meter" (IMU), um dispositivo que mede a velocidade de rotação do módulo em torno de seu eixo.
Os dados deste dispositivo , como explicam os engenheiros, foram levados em consideração ao processar os dados de altitude dos radares Schiaparelli. Em um ponto, a IMU caiu, como resultado da qual “mediu” uma velocidade de rotação anormalmente alta da renderização, que foi além dos valores permitidos. Tais falhas são a norma na operação de sensores inerciais e, geralmente, para suprimi-los, os cientistas “suavizam” o sinal e comparam os dados para o momento atual com os resultados obtidos em tempos passados.
Mas, neste caso, a IMU transferiu dados para o computador host Schiaparelli por um tempo inesperadamente longo, por um segundo, que "enganou" o software do módulo e forçou-o a considerar essas medidas como dados reais, e não como uma anomalia. Valores incorretos foram levados em consideração no cálculo da altura do módulo, como resultado do qual o computador de bordo Skiaparelli recebeu valores negativos de altura.
O módulo considerou que não estava nem na superfície de Marte, mas embaixo dela, o que o forçou a iniciar a etapa final do procedimento de pouso a uma altitude de 3,7 km, para separar os paraquedas e desligar os motores.O dispositivo Bereshit usou o seguinte módulo IMU:
STIM300 .
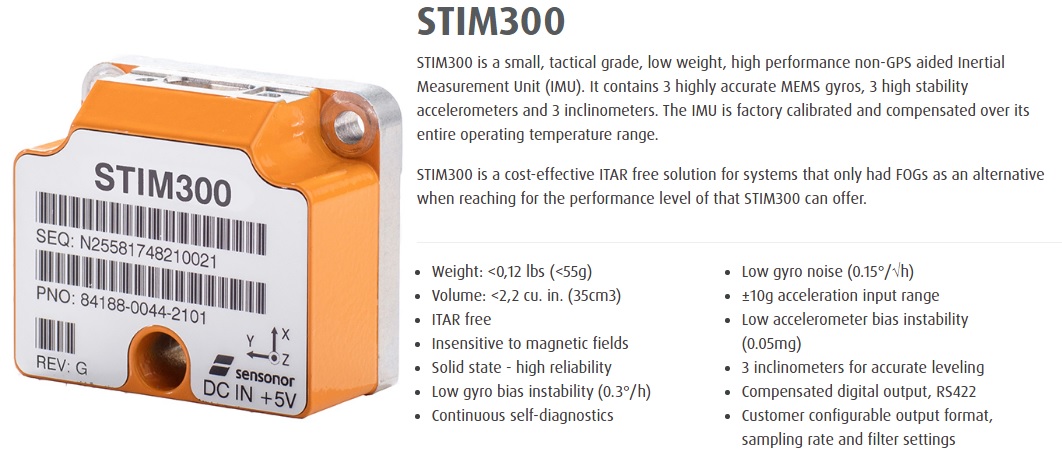
Este módulo possui características de proteção contra radiação de baixo nível; portanto, o uso de tais dispositivos na Lua provavelmente será mais bem pensado pelos engenheiros do SpaceIL posteriormente em novas missões.
Como houve uma declaração do SpaceIL após o acidente:
“Problema em uma das unidades de medição inercial de Beresheet. Os controladores de solo perderam a telemetria por alguns momentos, mas recuperaram a telemetria. ”É verdade que o módulo Bereshit IMU (ou ambos) forneceu dados incorretos (incluindo a medição de acelerações angulares e lineares) para o computador de bordo e por que motivo - isso ainda está sendo investigado pelos engenheiros da SpaceIL
No entanto, por enquanto está claro que a espaçonave Bereshit sofreu um mau funcionamento técnico em um dos componentes, o que levou ao desligamento dos motores, o que impediu que a sonda abaixasse a velocidade de descida para a superfície lunar.
Quando os motores foram reiniciados, eles não conseguiam mais travar a fundo, a velocidade do veículo era muito alta e a altitude da superfície da lua foi reduzida de forma crítica, e ocorreu uma colisão destrutiva.

A última foto da câmera Bereshit também é um pouco confusa. Como mostra a superfície lunar a 1000 km da zona de pouso planejada no Mar da Claridade.
O último quadro (publicado oficialmente) do aparelho Bereshit (a uma altura de 8 km):
Portanto, será muito difícil encontrar pelo menos algo do dispositivo Bereshit, pois a área de pesquisa é muito extensa:
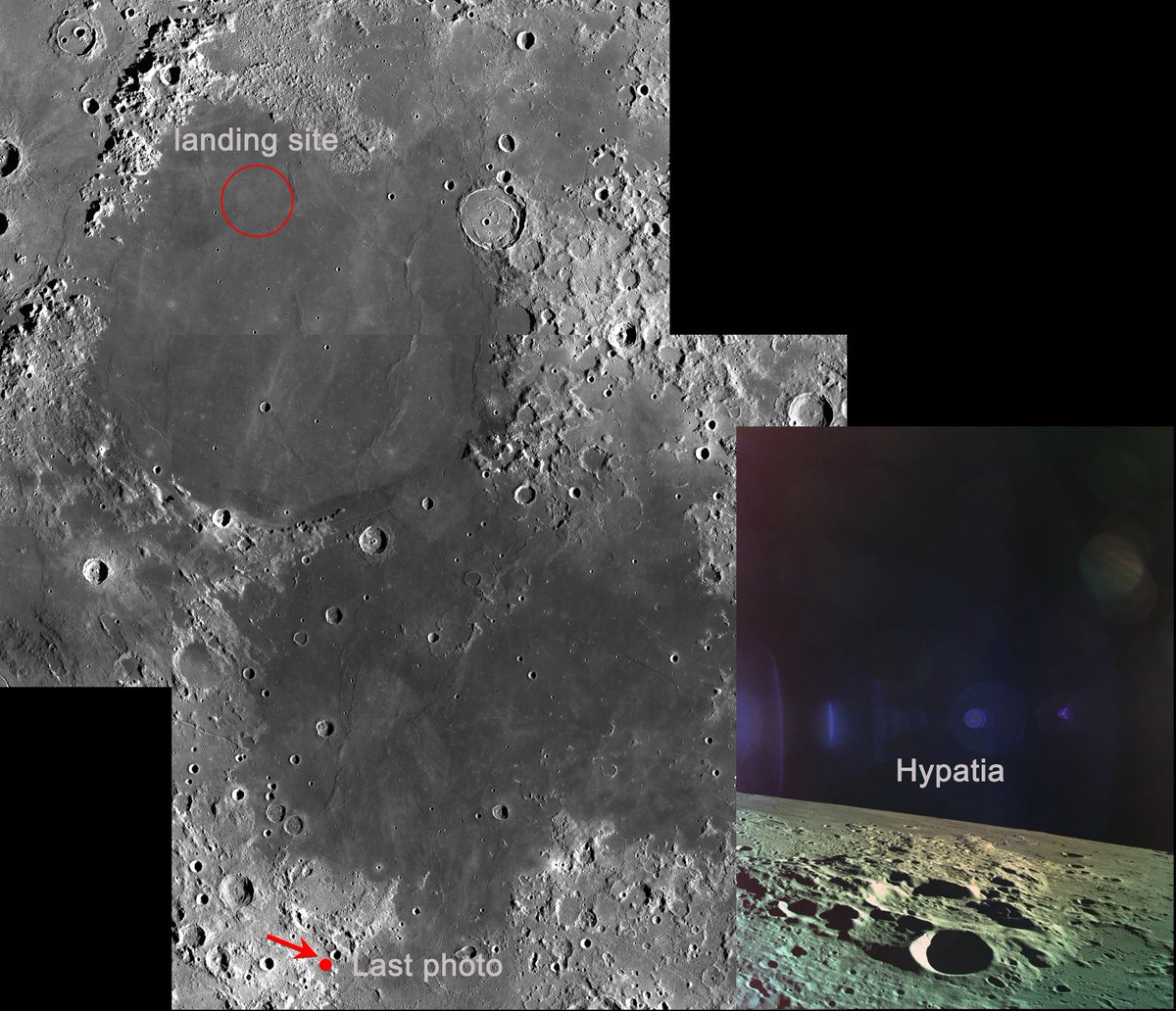
Embora seja um pouco claro para onde procurar (a 200 km da zona de pouso da Apollo 11):

A NASA planeja usar a sonda LRO para examinar a área de impacto do aparelho Bereshit, na esperança de que os elementos do conjunto de refletores de canto a laser não entrem em colapso e estejam localizados na superfície da lua.
Os refletores eram fixados na parte superior do dispositivo e, quando caía, podia quicar, se espalhar, rolar e escavar no solo lunar.
Mas mesmo que apenas parte do refletor esteja disponível para refletir o pulso da luz - isso será corrigido pelo LRO.Um altímetro a laser LRO (sonda orbital lunar da NASA), projetado para compilar mapas de altitude, enviará pulsos de luz laser para o refletor de canto no ponto de impacto do aparelho Bereshit e medirá quanto tempo leva para a luz voltar.
Usando essa técnica, os engenheiros da NASA e do SpaceIL planejam localizar os restos do dispositivo Bereshit.
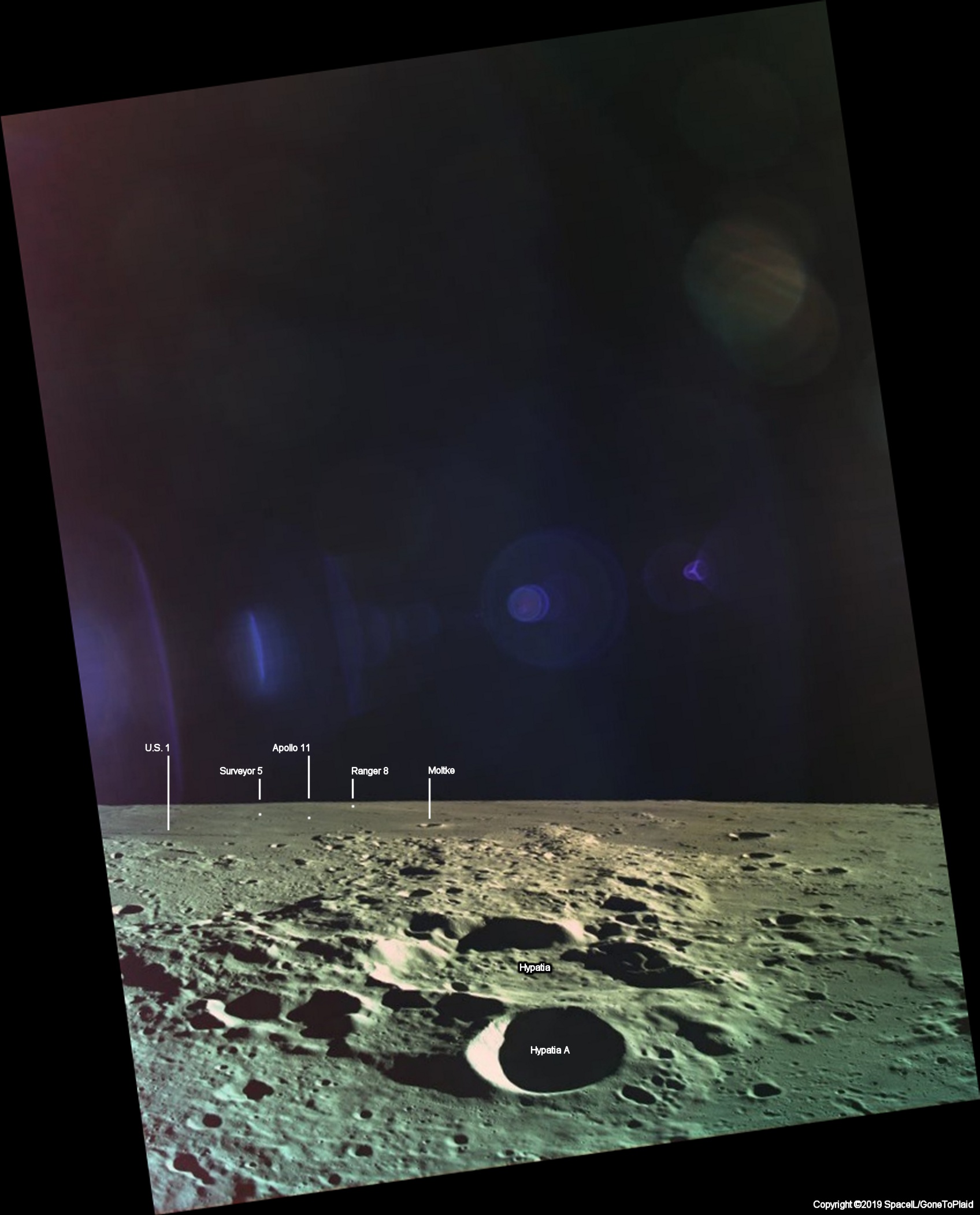
 Embora também seja interessante aqui, ainda existem fotos da queda no SpaceIL, mas elas não as publicam:- Essa é realmente a última foto recebida da Beresheet? Quando exatamente foi tirada? Eu pergunto porque a cratera Hypatia é muito mais ao sul do que o local de pouso planejado.
Embora também seja interessante aqui, ainda existem fotos da queda no SpaceIL, mas elas não as publicam:- Essa é realmente a última foto recebida da Beresheet? Quando exatamente foi tirada? Eu pergunto porque a cratera Hypatia é muito mais ao sul do que o local de pouso planejado.
- Não, não é a última foto que foi tirada. Temos uma foto que foi tirada mais perto da aterrissagem, mas ainda não foi confirmada a publicação . Presumo que será publicado em breve.O que acontecerá a seguir com a missão Bereshit?O desenvolvimento de um novo projeto espacial, Bereshit 2.0, foi anunciado.O primeiro-ministro israelense Benjamin Netanyahu prometeu que o Estado participará de uma segunda tentativa de enviar uma estação automática para a lua.“Vamos lançar o Bereshit-2. O Estado de Israel participou do lançamento da primeira nave espacial e participará do lançamento da segunda. Espero que desta vez tudo tenha sucesso. Nesse caso, realmente seremos o quarto país do mundo a pousar na lua ”, disse Netanyahu em uma reunião do governo.Está previsto que o projeto Bereshit 2.0 seja mais sério e caro (comparado ao primeiro), mas ainda será privado.
primeiro-ministro israelense Benjamin Netanyahu prometeu que o Estado participará de uma segunda tentativa de enviar uma estação automática para a lua.“Vamos lançar o Bereshit-2. O Estado de Israel participou do lançamento da primeira nave espacial e participará do lançamento da segunda. Espero que desta vez tudo tenha sucesso. Nesse caso, realmente seremos o quarto país do mundo a pousar na lua ”, disse Netanyahu em uma reunião do governo.Está previsto que o projeto Bereshit 2.0 seja mais sério e caro (comparado ao primeiro), mas ainda será privado. O SpaceIL também assumirá a administração principal do novo projeto Bereshit 2.0 e continuará sendo uma organização sem fins lucrativos.Duração planejada do projeto "Bereshit 2.0": 2-3 anos.É maravilhoso quando o país, engenheiros e pessoas não deixam de acreditar na vitória.
O SpaceIL também assumirá a administração principal do novo projeto Bereshit 2.0 e continuará sendo uma organização sem fins lucrativos.Duração planejada do projeto "Bereshit 2.0": 2-3 anos.É maravilhoso quando o país, engenheiros e pessoas não deixam de acreditar na vitória. Nenhum sonho está além do seu alcance, se você realmente o quer!E para a sobremesa :modelo Lego de Beresheet
Nenhum sonho está além do seu alcance, se você realmente o quer!E para a sobremesa :modelo Lego de Beresheet