
Seis dias depois que o aparelho Bereshit caiu na superfície lunar, a equipe do SpaceIL anunciou oficialmente a versão intrigante do acidente na Lua em 11 de abril de 2019. E há ainda mais perguntas sobre o que aconteceu.
Informações atualizadas sobre o acidente em 18/04/2019.
Em continuação
desta publicação .
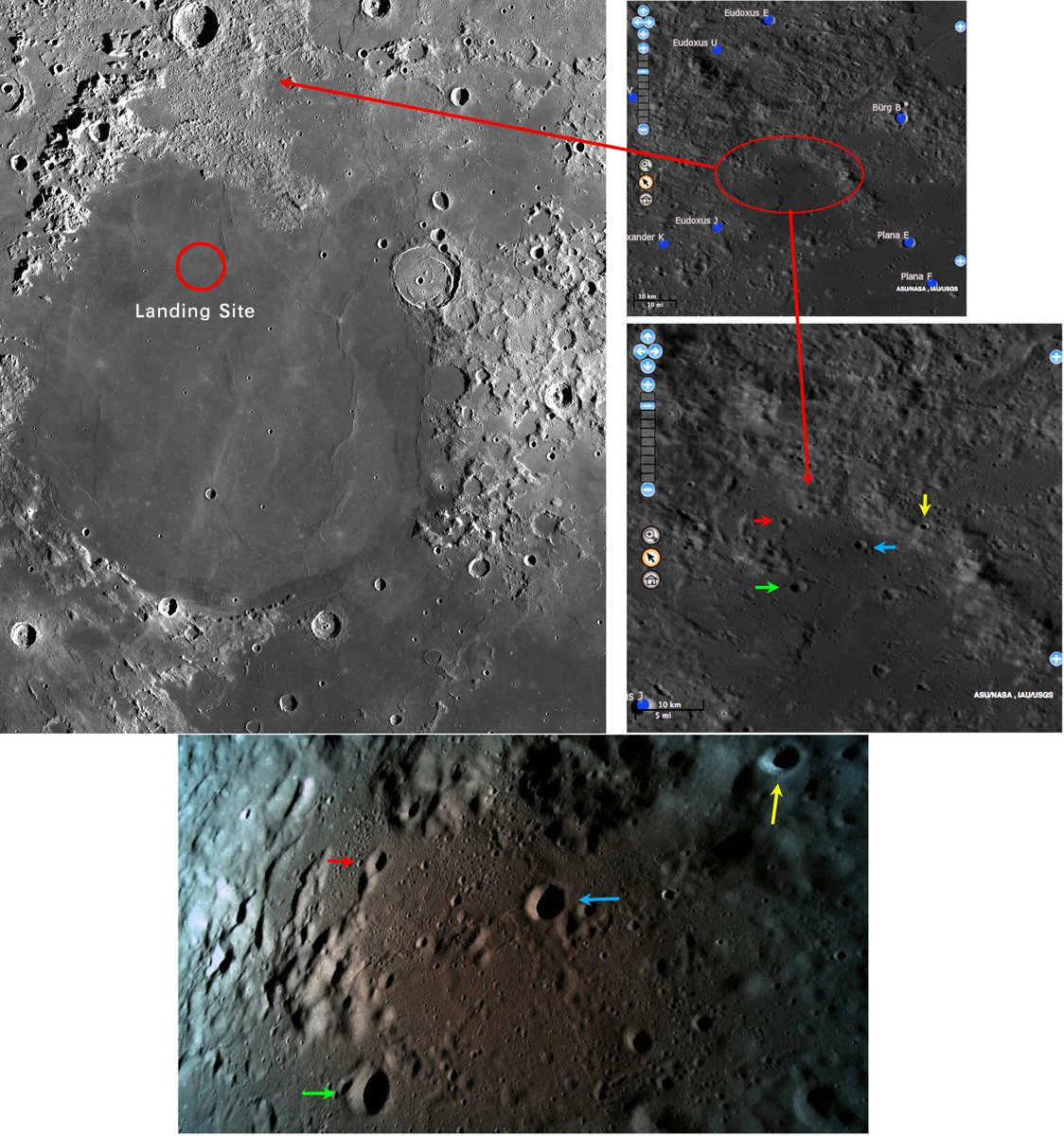
A última foto oficial do SpaceL do dispositivo Bereshit (15 km até a superfície lunar):

Aqui está a referência de localização para esta foto:
Resultados preliminares da investigação do acidente:
no processo de pouso, o comando foi ativado pelo computador de bordo, cuja execução levou a um resultado fatal para a missão. Aqui estão os resultados da investigação preliminar da manobra de pouso de Beresheet: Parece que, durante o processo de pouso, foi digitado um comando que levou a uma reação em cadeia, que causou o desligamento do motor principal e impediu sua reativação.
Aqui estão os resultados da investigação preliminar da manobra de pouso de Beresheet: Parece que, durante o processo de pouso, foi digitado um comando que levou a uma reação em cadeia, que causou o desligamento do motor principal e impediu sua reativação."Parece que
um comando foi introduzido durante o processo de pouso , o que levou a uma reação em cadeia que causou o desligamento do motor principal do aparelho e não permitiu que ele voltasse a trabalhar".
Atualização de 18/04/2019:
No entanto, o acidente devido ao comando recebido do operador durante o pouso é de nervosismo, não há tempo para analisar a situação, a unidade principal IMU1 (unidade de medição inercial) está em modo de emergência, o operador envia um comando para ativar a unidade IMU2 sobressalente, o que causou outras consequências críticas no trabalho o computador de bordo (congelamento, reinicialização) e falha do mecanismo.
" Um comando destinado a corrigir um mau funcionamento em uma das unidades de medição inercial da espaçonave Beresheet levou a uma cadeia de eventos que desligou seu motor principal durante o pouso, de acordo com uma investigação preliminar conduzida pela SpaceIL."
Assim, é possível que tenha sido um erro de programa / humano (os comandos foram inseridos pelo operador ou engenheiros no MCC) no procedimento de aterrissagem do aparelho Bereshit.
A lista de comandos e modos de operação com o dispositivo Bereshit foram aprovados e transmitidos apenas a partir do SpaceIL MCC. Os engenheiros da SpaceIL criaram patches para o computador de bordo do dispositivo, verificaram sua operacionalidade e funcionalidade e também prepararam comandos para o procedimento de pouso.
É interessante assumir o controle do dispositivo e introduzir um código / comando adicional em seu computador de bordo, teoricamente, era possível fazê-lo ou havia alguma proteção contra acesso não autorizado externo?
De fato, durante o pouso, o tempo passou por segundos e os operadores poderiam perder a situação com o dispositivo recebendo equipes estrangeiras. Embora, neste momento, os operadores também tenham evocado o modo manual, tentando trabalhar com o dispositivo. Talvez aqui também houvesse uma discrepância nos comandos inseridos ao mesmo tempo.
Mas, provavelmente, houve um erro no código "deles" (talvez fosse um dos muitos patches que foram transmitidos ao computador de bordo após cada reinicialização), que continha um comando fatal.
Essa equipe foi deliberada ou acidentalmente apresentada, o que levou ao acidente - esse fato permanecerá fechado, provavelmente, embora esperemos os resultados finais no futuro próximo da SpaceIL, que eles prometeram publicar.
O que se sabe sobre os componentes de hardware e software do dispositivo Bereshit:- o computador de bordo é um (1), não duplicado (houve várias reinicializações do computador durante o vôo para a lua);
- controle o código do programa, comandos e trabalhe com o computador de bordo - na linguagem C;
- devido ao fato de haver apenas um computador, na reinicialização, todas as atualizações (patches) são apagadas e precisam ser baixadas adicionalmente novamente no sistema;
- baixa velocidade de transferência de dados: uma foto de alta resolução (de uma câmera de 8 Mpx) carrega 40 minutos;
- DLR (Centro Aeroespacial Alemão) testou o mecanismo de pouso do veículo Bereshit;
- uma equipe do SpaceIL MCC: a maioria são engenheiros e físicos espaciais, vários jovens cientistas e engenheiros que estão apenas estudando sistemas de controle de satélite.
Quando o código com este comando fatal pode ser implementado? Provavelmente, ao se preparar para o procedimento de pouso.
Mas o comando no computador de bordo funcionou após o aparelho ter passado o "ponto de não retorno" quando o processo de pouso automático controlado apenas pelo computador de bordo começou.
Embora o SpaceIL MCC tenha sido uma tentativa no modo de controle manual de influenciar a situação com o dispositivo durante o pouso.
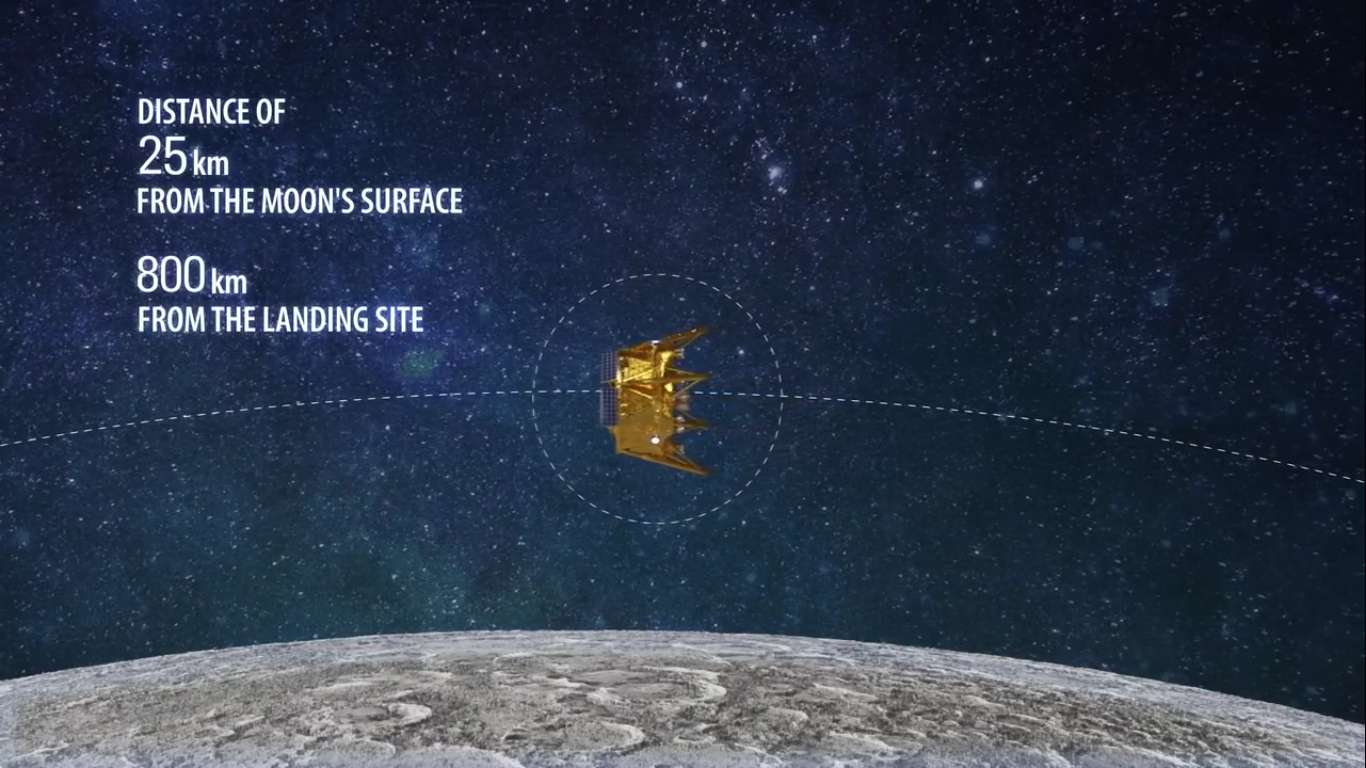
A uma distância de 800 km do local de pouso, começam os procedimentos de plantio:
O dispositivo Bereshit receberá uma série de comandos da MCC:

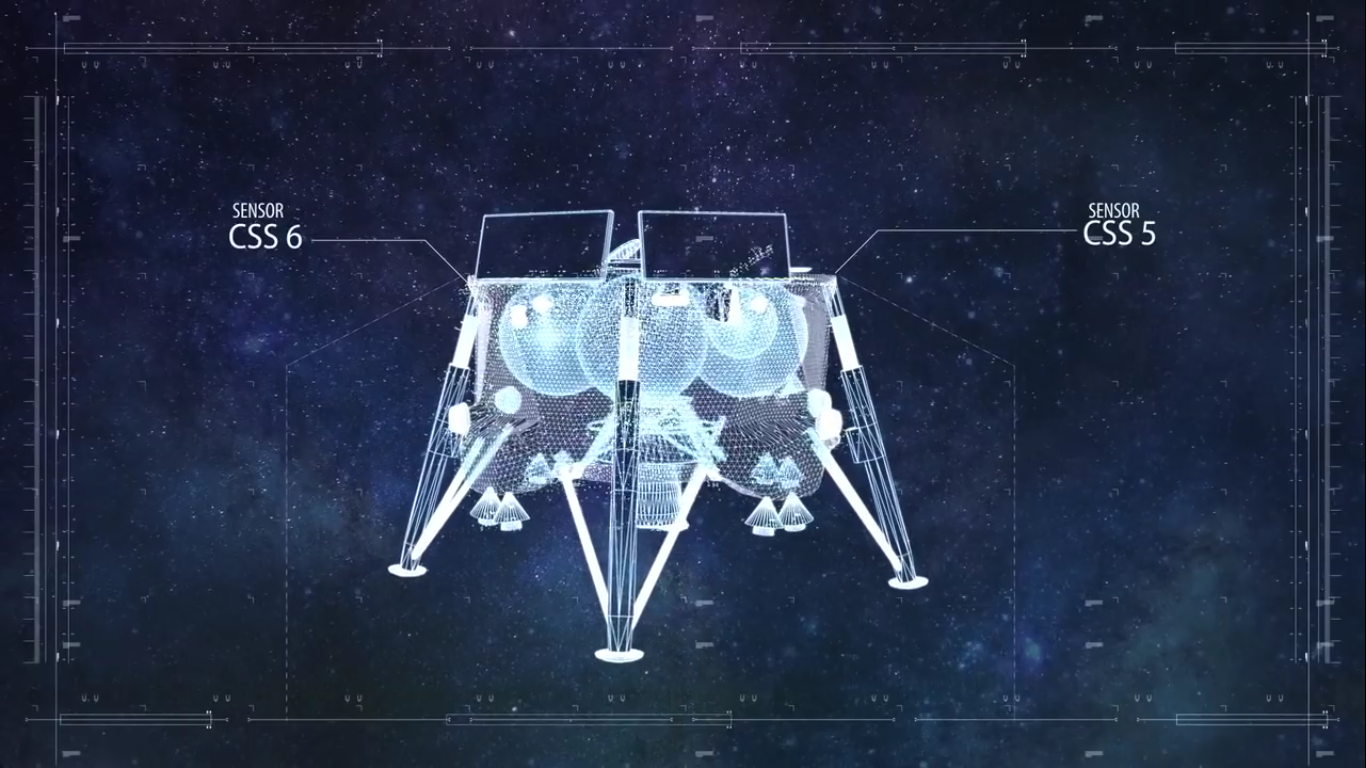
Os sensores de pouso (primário e de backup) serão ativados:
O procedimento para alterar a posição (orientação) do aparelho Bereshit será iniciado:
Após a conclusão dos procedimentos preparatórios antes do embarque, o computador de bordo Bereshit e o MCC terão a oportunidade de avaliar o estado dos sistemas e sua prontidão para o embarque; se algo não funcionar corretamente, o procedimento de embarque será cancelado, se tudo estiver normal, após o início do próximo estágio. O desembarque não será mais cancelado:
Se tudo estiver funcionando corretamente, o aparelho Bereshit começará a reduzir sua velocidade orbital e a distância da superfície lunar usando os motores principal e auxiliar, esse procedimento levará 15 minutos:

Vídeo de desembarque:
O que aconteceu, de acordo com o vídeo de pouso, com o dispositivo (os horários são indicados no vídeo):
23:03 O indicador de telemetria ficou verde. Modo: orientação.
25:04 Modo: travagem.
25:20 Passou o "ponto sem volta".
25:26 O indicador do ponto sem retorno ficou preto.
25:52 O indicador de velocidade vertical está verde.
28:16 O indicador de telemetria deixou de estar verde.
28:20 O indicador de telemetria ficou verde por um momento e depois deixou de ficar verde.
29,37 Distância: 210 km.
29:50 A distância muda para 385 km.
30:03 A distância muda para 370 km.
30:40 O indicador de telemetria ficou verde.
30:51 A distância muda para 314 km.
31:33 Foto de selfie mostrada com a lua. Altitude cerca de 22 km? O indicador de telemetria ficou verde.
31:50 O indicador de telemetria deixou de estar verde.
31:55 a 32:29 "[inaudível] matá-lo (processo?)." "[até inaudível] ocupado"
(aqui os engenheiros já estão em controle manual tentando lidar com uma situação de emergência)
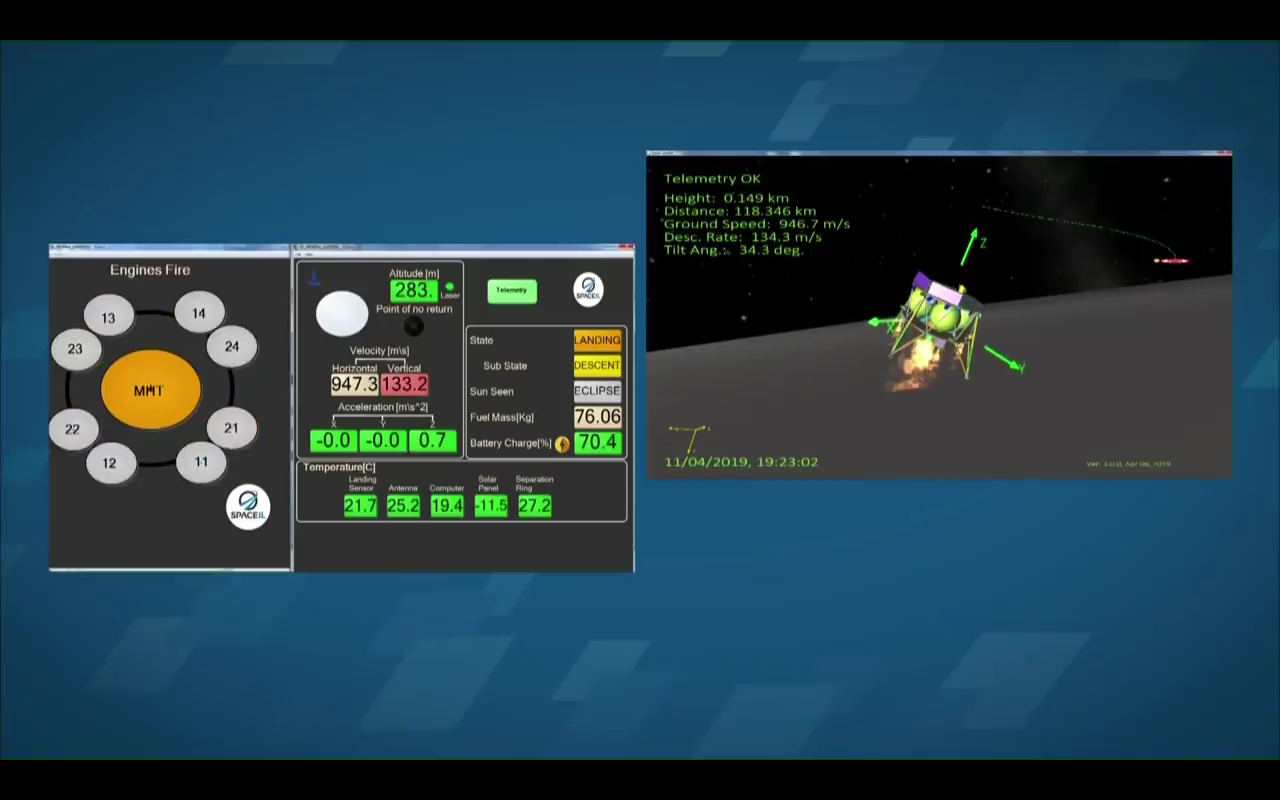
32:48 A tela de telemetria é exibida. O indicador de telemetria está amarelo. Altitude 14095 M. Velocidade horizontal 955,5 m / s. Velocidade vertical 24,8 m / s. O motor principal está ligado. A célula de velocidade horizontal é amarela. Outros parâmetros são mostrados em verde, exceto o indicador de telemetria.
32:49 Todos os motores estão ligados.
32:51 Todos os motores estão desligados.
32:55 O mecanismo principal está ligado.
32:57 Todos os motores estão ligados.
32:59 O mecanismo principal está ligado. Distância: 183,8 km
33:01 - 33:03 "O sensor IMU está com defeito"
33:02 Todos os motores estão ligados.
33:05 O motor principal está ligado.
33:07 Todos os motores estão ligados.
33:09 O motor principal está ligado.
33:11 Todos os motores estão ligados.
33:13 O mecanismo principal está ligado.
33:16 Todos os motores estão ligados.
33:20 O indicador de telemetria ficou verde. Todos os motores estão desligados. Todas as imagens congelaram (nenhuma alteração nas leituras).
33:32 O indicador de telemetria deixou de estar verde. Todos os motores estão desligados. Todas as imagens congelaram (nenhuma alteração nas leituras).
34:24 O indicador de telemetria ficou verde. Todos os motores estão desligados.
36:25 - 36:33 “Problemas com o mecanismo principal. Reiniciamos o computador de bordo para ligar o motor. ”
Uma tentativa de transcrever as palavras do locutor e dos engenheiros durante o processo de pouso (o tempo é diferente, mas a essência e os segundos são os mesmos):
7:37:37 - IMU2 não está bem
7:37:50 - [não claro] tentará ativá-lo.
7:37:57 - Alguém está perguntando se [não está claro o que é ') nos fará mudar para o 2º [algo]
7:38:10 - Conexão perdida do JPL
7:38:34 - Perdemos um IMU e a conexão com o JPL, os dois não devem estar relacionados.
[no fundo alguém diz algo sobre como reiniciar a IMU]
7:38:39 - Não ative o IMU2
7:38:52 - O que você vê na tela não está correto, atualmente não há telemetria
7:39:06 - [em inglês] perdemos a telemetria, mas agora temos telemetria.
7:39:23 - Passamos 10km de altitude
7:39:29 - Velocidade abaixo de 900 m / s
7:39:34 - Lembrete de que precisamos atingir uma velocidade de 0
7:39:47 - O motor está funcionando, há um aumento de pressão [pouco claro] para 5 bar [?], "Interessante"
7:39:52 - 2ª imagem baixada.
7:40:06 - [Anouncer começou a dizer algo sobre o sensor de pouso a laser]. [em segundo plano - claro, mas parece que ele disse que o motor não está funcionando]
7:40:13 - Podemos ter um problema com o mecanismo principal.
7:40:17 - Faça um reset [Eles mencionaram anteriormente na transmissão que podem enviar comandos para a espaçonave durante o processo de pouso]
7:40:24 - O que você quer?
7:40:28 - A situação não parece boa, nem o motor principal.
7:40:33 - 2ª imagem recebida.
7:40:40 - Perder altitude
7:41:07 - [Em inglês] Parece que temos um problema com o mecanismo principal, estamos reiniciando a espaçonave para tentar ativar o mecanismo
7:41:10 - Existe aprovação para enviar [claro]?
7:41:15 - O motor principal está funcionando agora, com base em [medições de pressão]
7:41:19 - Motor principal novamente. [e novamente em inglês]
7:41:27 - Perdeu muita altitude, situação pouco clara.
7:41:32 - Conexão perdida com o JPL
7:41:45 - Agora temos uma conexão apenas via ssc [??] e não através da NASA, mas temos uma conexão com a espaçonave.
7:41:49 - Telemetria perdida
7:41:52 - Agora estamos sem telemetria
7:41:57 - [português] O motor principal está ligado, mas perdemos a comunicação
7:42:10 - Vamos esperar um momento para [avaliação] de [pouco claro]
7:42:17 - Suspeitamos que não aterrissamos [claro] ainda avaliando
7:42:56 - Estamos sem telemetria e suspeitamos que perdemos a espaçonave.
7:43:16 - Todas as indicações são de que, infelizmente, não seremos a quarta nação a pousar na lua.
7:43:33 - Estamos na lua, mas não da maneira que queríamos ser.
Os últimos 4 segundos da vida útil do dispositivo, de acordo com os dados da MCC (redução de 678 a 149 metros):
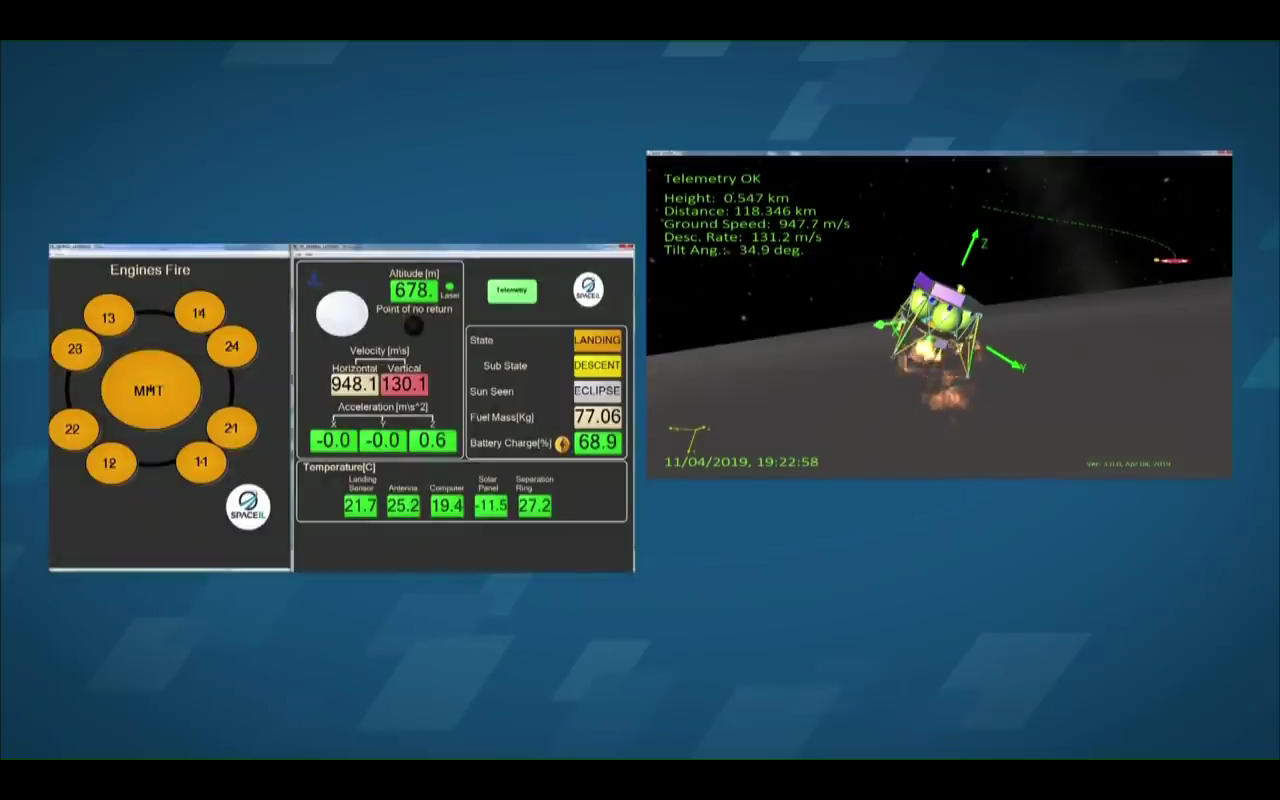
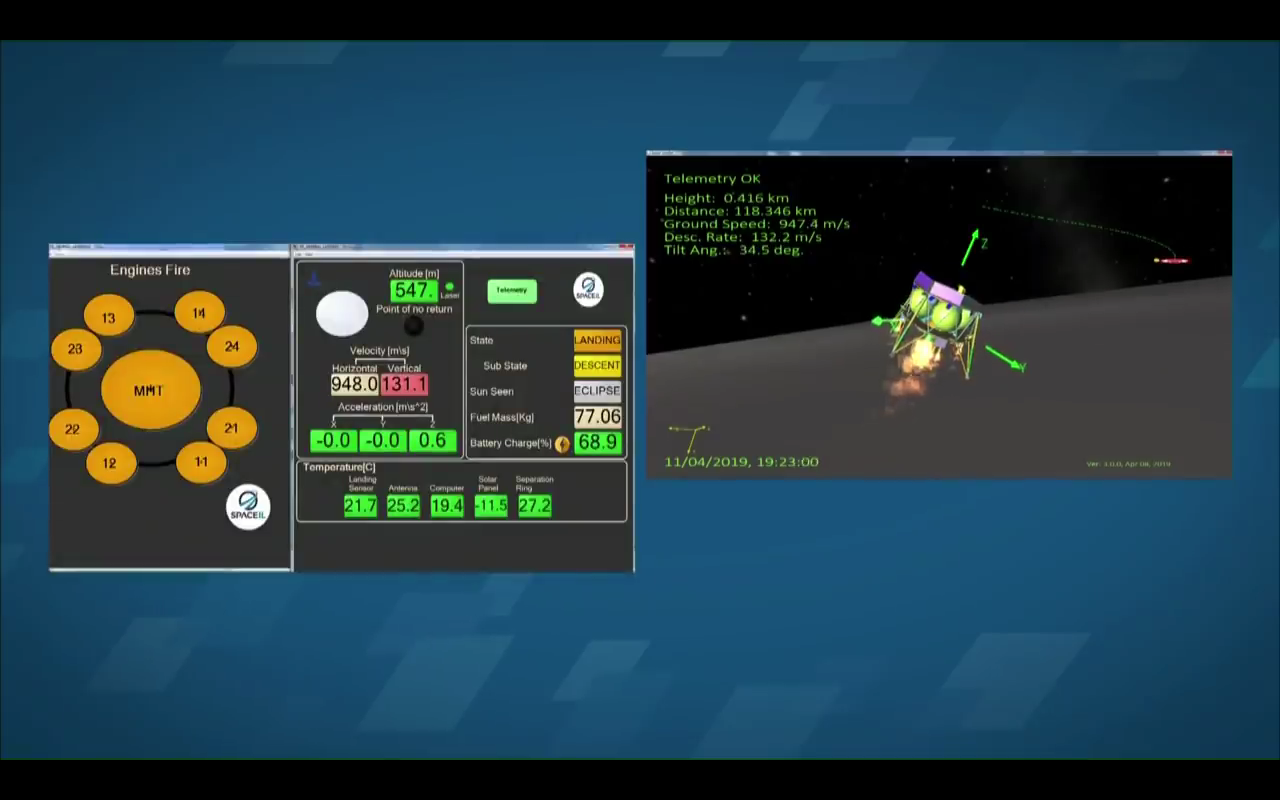

Às 19:23, os dados de telemetria deixaram de chegar completamente.
Os engenheiros do SpaceIL agora têm todos os dados, listagens de comandos e patches que eles enviaram ao dispositivo Bereshit após cada reinicialização do computador de bordo, também é possível examinar todas essas informações mais detalhadamente e analisar o procedimento de pouso antes do acidente no dispositivo.
Se realmente não são apenas dados incorretos dos sensores externos que levaram à tragédia, mas também o código do programa que processou esses dados ou até levou acidentalmente o dispositivo a uma emergência, isso só pode ser resolvido com experiência e impedido mesmo na fase de criação do código antes do envio para a nave espacial.
O presidente da SpaceIL, Morris Kahn, disse: “
Estou orgulhoso da equipe de engenheiros da SpaceIL por seu excelente trabalho e dedicação, e infelizmente os acidentes são frequentemente parte integrante de um projeto tão complexo e inovador. Agora é importante aprender as lições aprendidas o máximo possível, estudar os erros e seguir em frente com ousadia .
A propósito, o aparelho Bereshit estava em órbita da Lua e usou um magnetômetro a bordo durante o pouso e transmitiu ao MCC do SpaceIL alguns dos dados científicos sobre o campo magnético da lua.
Assim, ele completou parte de seu pequeno programa científico!
Dados atualizados por engano em caso de acidente:
A primeira etapa concluída da investigação se resumiu a um estudo dos fatos e sequência dos eventos. Durante o vôo, houve interrupções na comunicação, mas o aparelho Bereshit continuou a funcionar no modo especificado. Isso foi até o momento em que o dispositivo começou a pousar na superfície lunar.
Durante a investigação, verificou-se que um dos comandos enviados pelo centro de controle de vôo não foi executado, o que levou a uma cadeia de falhas subseqüentes: o motor parou de funcionar e o dispositivo caiu na superfície.
Um mau funcionamento foi detectado na operação do sensor do acelerômetro, chamado UMI (responsável pela aceleração). Ainda não foi estabelecido com precisão o motivo da falha, o que levou a reações negativas subsequentes do sistema.
O comando para ativar o sensor de aceleração foi enviado a partir do SpaceIL MCC.
Após a falha seguida, foram feitas tentativas para reiniciar o mecanismo de maneiras alternativas, mas não tiveram êxito.
Tudo aconteceu sob a mais severa pressão temporária: ocorreu uma falha nos últimos segundos da missão, que no final não pôde ser concluída.
O computador de bordo do aparelho Bereshit também tentou reiniciar o motor de forma autônoma - houve 5-6 dessas tentativas. Mas todos eles não tiveram sucesso.Possivelmente, ocorreu uma execução incompatível de comandos entre os engenheiros no dispositivo para ligar os módulos sobressalentes (IMU2), o que levou a novos problemas e acidentes.
A sonda estava usando IMU 1 e não foi afetada inicialmente pela falha do IMU 2.
Um engenheiro pergunta se eles devem tentar habilitar o IMU 2 e outro engenheiro pergunta 'isso faria o sistema mudar para ele (presumivelmente' significa 'significa IMU 2).
Talvez, apesar da palavra de cautela do segundo engenheiro, alguém tenha enviado um comando para tentar reiniciar o IMU 2 e talvez seja isso que eles querem dizer com um comando ruim que inicia uma cadeia de eventos ...
