Olá querido habratchitel!Nem mesmo quatro anos se passaram desde que o primeiro modelo de trabalho do nosso
GPS subaquático viu a luz; desde então,
comemos um quilo de sal e fizemos um monte de vários sistemas e dispositivos, mas, pela vontade do destino, um importante teste ainda passou pelo nosso primogênito. Neste artigo, vou lhe dizer como foi.
Todo mundo que está preocupado com o tema dos robôs subaquáticos, seu controle e navegação - seja bem-vindo ao gato em nosso caiaque congelado nas águas de abril do reservatório de Volgogrado!

(Akhtung! Há muitas fotos sob o corte!)
"... o verdadeiro local do navio, embora seja conhecido, mas não é acidental,
é, mas não se sabe em que ponto ".
Aleksishin V.G. e outra navegação prática, 2006. p.
O que é isso tudo?
Para quem não tem tempo de ler, descreverei brevemente o problema:
O GPS não pega na água e a comunicação por rádio não funciona, quase toda a navegação é realizada com acústica, e a comunicação é feita com acústica, cabo e, às vezes, em águas claras, usando
luz .
Para os recém-chegados, tradicionalmente fornecerei links para nossas publicações anteriores no hub, onde contamos tudo sobre comunicações e navegação subaquáticas: da história da criação de nosso GPS subaquático e da transmissão de som de "vídeo" através da água e às instruções sobre como fazer uma simples antena hidroacústica a partir do lixo:
-
GPS subaquático do zero por ano-
Fabricamos o menor modem de sonar do mundo-
Sobre o efeito das cianobactérias nas funções de discurso do presidente-
Fazendo uma antena de sonar simples com o lixo-
Sessão de transmissão de som de vídeo através da água com exposição-
"GPS" subaquático em dois transceptores-
Navegação subaquática: rolamento não rolamento - você está fadado ao sucesso-
GPS subaquático: continuaçãoDrones voando e rolando, rastejando no chão e flutuando na superfície transmitem vídeo de suas câmeras em tempo real e, às vezes, coordenadas GPS, e o operador sempre sabe onde está seu dispositivo, além disso, muitas vezes o operador pode vê-lo.
Com veículos subaquáticos (TNPA ou ROV), tudo é um pouco diferente. Deixando o dispositivo entrar em águas escuras, você pode ter certeza de apenas uma coisa - ele definitivamente está embaixo d'água.
Um pouco mais fundo no problema
Os dispositivos vêm em diferentes classes, dividindo por tamanho e tarefa. As mais simples e menores (como a nossa), as de inspeção, são apenas uma câmera de vídeo em um cabo com motores. Os mais complexos e maiores podem ser equipados com manipuladores e outros dispositivos interessantes,
alguns espécimes do tamanho de uma gazela vêm completos com uma embarcação especializada,
piratas e uma tripulação de embarque e têm uma capacidade total de mais de 200 hp. Os comprimentos de cabo podem variar de dezenas a centenas de metros em pequenos dispositivos e atingir milhares de metros nos principais grandes dispositivos.
O TNLA é controlado nominalmente pelo feedback visual - olhando para a imagem transmitida das câmeras da câmera por cabo, às vezes elas são equipadas com sonar, pois às vezes a água está
sempre nublada.
Essa abordagem tem exatamente uma desvantagem: vendo no monitor uma imagem de um elemento de paisagem de interesse, é absolutamente impossível dizer exatamente onde ele está localizado.
Navegação subaquática
Eles estão enfrentando essa desvantagem usando sistemas de posicionamento acústico. Como regra geral, eles colocam um dispositivo de alerta (emitindo periodicamente um sinal especial) ou um sinalizador de transponder no dispositivo. O sinal de toque é detectado, a distância é determinada e, em seguida, pelo ângulo (ou dois ângulos - horizontal e vertical) da chegada do sinal e pela distância, a localização do dispositivo é determinada. Esses sistemas são chamados UKB (abreviação de Ultrashort-Base). Eles se relacionam com o goniométrico-rangefinder e têm uma lista completa de desvantagens, especialmente no que diz respeito a esta tarefa. Os estrangeiros mais simples
custam 17.000 euros , os nossos
também estão
lá , não são piores e mais acessíveis, mas ainda não são de graça.
Para determinar os ângulos horizontais (e em sistemas antigos e verticais, no novo pinger transmite sua profundidade) dos ângulos de chegada do sinal do respondente ou pinger, é necessária uma antena de direção. O dispositivo em si não é simples e requer instalação em uma haste, que deve ser montada em um navio. Pela faixa, profundidade e ângulo horizontal (ou pela faixa e dois ângulos), apenas a posição relativa do aparelho é determinada. Nesse caso, a precisão diminui com o aumento da distância.
A precisão da determinação do ângulo depende de:
- características da própria antena e geralmente equivale a cerca de 0,5-3 °, e nos sistemas mais avançados atinge 0,03 °, mas vale a pena o prazer de apenas dinheiro demoníaco. Deixe-me lembrá-lo de que 1 ° a uma distância de 1000 metros oferece uma distância de 17 metros (ou seja, ± 17 metros).
- em quão bem a posição da própria antena é determinada (rotação e compensação);
- de condições hidrológicas específicas. Por exemplo, é possível detectar não um sinal direto, mas alguma reflexão ou sua soma, determinando assim o ângulo de chegada do sinal refletido. E ele poderia refletir de qualquer coisa - inclusive de uma direção completamente diferente.
Depois que a distância e o ângulo de chegada do sinal são determinados, você precisa vincular tudo isso à geografia. Ou seja, você precisa saber a posição geográfica da antena de localização de direção e a direção de seu zero em relação à direção ao norte. Em seguida, você pode resolver o
problema geodésico direto e determinar a posição do veículo subaquático nas coordenadas geográficas. Ou seja, você ainda deve ter uma bússola e GPS na antena.
Em geral, estou convencido de que a UHF deve ser aplicada apenas onde é completamente impossível usar sistemas de base longa.
Eu enfatizo - absolutamente. Por exemplo, quando um objeto rebocado é posicionado e você precisa percorrer uma distância muito longa. Nesse caso, será necessário mover os elementos de uma base longa com muita frequência e isso levará a um custo muito tempo e esforço, ou, por outro exemplo, será impossível instalar bóias de uma base longa na superfície devido à grande profundidade - cordas muito longas e, em geral, o esquema de ancoragem será necessário muito complicado. Em todos os outros casos, eu os conjuro: use uma base longa - é mais fácil, mais confiável e mais precisa.
O UKB é bom e indispensável onde você precisa encontrar algo, aproximando-se gradualmente e aumentando a precisão. Pode parecer que eu sou contra UHF e para o DB, mas estou apenas pedindo o uso de equipamentos de acordo com a finalidade pretendida. No final, também fizemos o KGB e, diante disso, é difícil me acusar de preconceito.
Sistemas de longo alcance (DB) - é quando existem vários receptores ou transmissores distantes (por exemplo, o GPS é um sistema de longo alcance). Eles mantêm sua precisão dentro da base, são muito menos suscetíveis a arremessos e geralmente fornecem resultados muito melhores, pois se relacionam com os sistemas rangefinder ou rangefinder de diferença.
Durante muito tempo não pude responder à pergunta - por que todo mundo está tentando martelar pregos com uma pá? Mas com o tempo, meus colegas e eu chegamos a uma conclusão decepcionante: em primeiro lugar, as pessoas pensam com muita simplicidade - uma antena e um ponteiro são mais fáceis do que vários elementos de uma longa base que estão distantes um do outro. Em segundo lugar, até recentemente, os sistemas de banco de dados eram representados apenas pelos chamados base inferior, cuja instalação requer muito tempo e dinheiro.
Há muito que estamos em uma cruzada contra o
analfabetismo dos usuários da ordem estabelecida das coisas. Começou quando fizemos o primeiro exemplo do nosso GPS subaquático, que é um sistema de base longa com uma superfície em vez de uma base inferior.
GPS debaixo d'água
Vamos voltar ao herói do teste de hoje. O sistema de navegação é representado pela própria base de navegação, formada por quatro
bóias-repetidoras flutuantes
do sinal GNSS:

As bóias antes de iniciar o trabalho são instaladas em um lago com a ajuda de
pedras, âncoras e cordas. Tudo o que precisa ser feito é liberar a bóia ancorada, antes disso, clicando no botão. Isso é realmente tudo o que precisa ser feito.
Outro elemento do sistema é um receptor de navegação localizado em um objeto subaquático:

O receptor de navegação
RedNODE (pequeno cilindro amarelo) está montado na parte traseira da unidade. É alimentado pela rede de bordo do robô e transmite dados através do cabo do dispositivo.
Como as bóias apenas emitem e os receptores aceitam (operam de acordo com o esquema de alcance diferencial) e ninguém incomoda ninguém, em um conjunto de bóias em uma área de água qualquer número desses receptores pode funcionar. Ou seja, teoricamente toda uma frota de veículos subaquáticos e mergulhadores em qualquer quantidade e proporção pode navegar teoricamente.

Devido à pressa, prendemos casualmente o receptor de navegação e adicionamos alguma flutuabilidade feita de material denso isolante de calor.
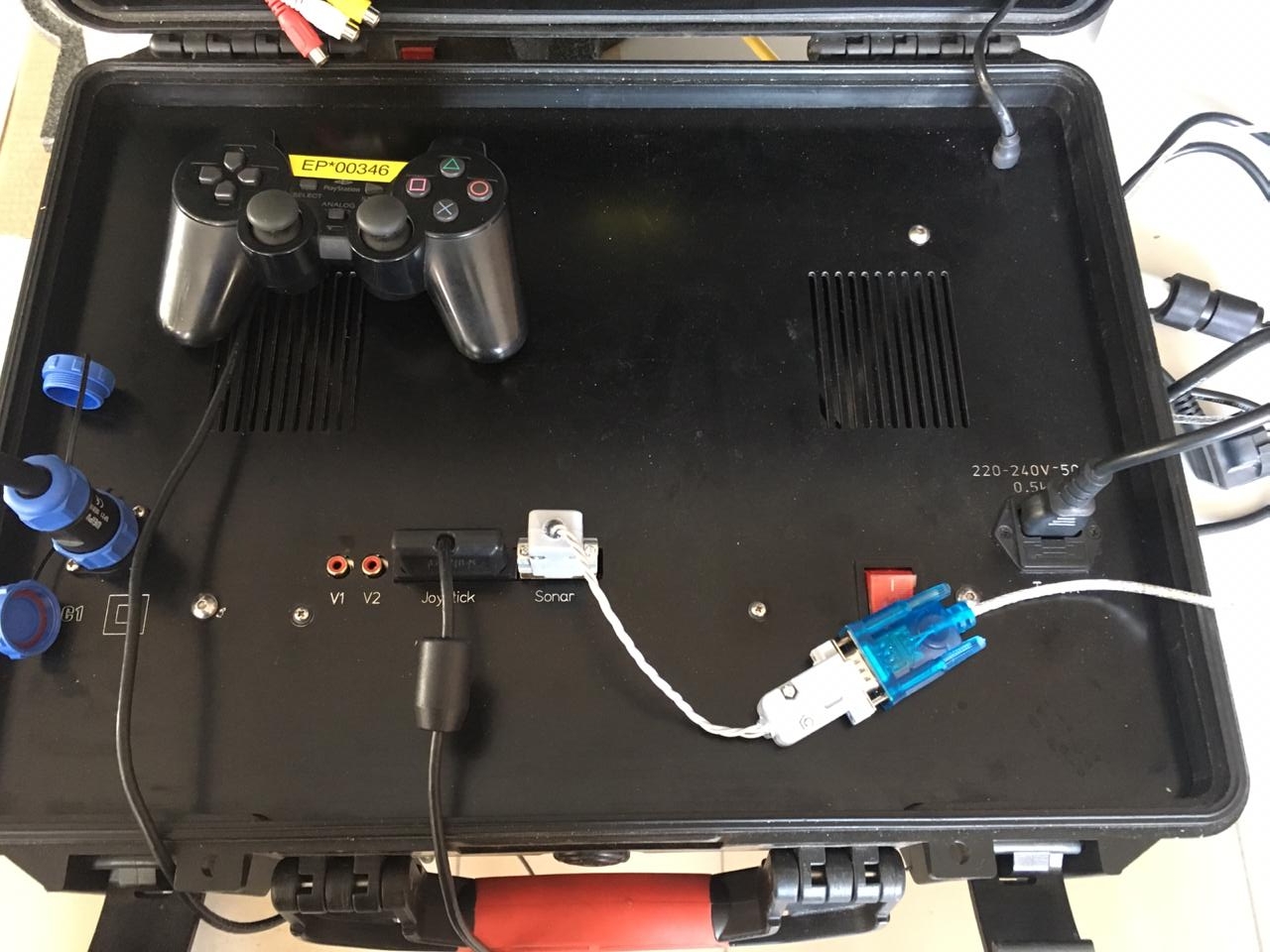
Os dados do receptor entram no estojo de controle e são inseridos em qualquer laptop através do conversor USB RS232 <-> (conector "Sonar" na foto).
As coordenadas neste sistema são geradas no receptor (ou seja, estritamente terminologicamente, o sistema é um sistema de navegação e não um sistema de posicionamento). Porém, como os TNLAs operam com um cabo, em princípio, não deve haver problemas em transferir o local calculado no dispositivo para o cabo para cima. A propósito, o receptor de navegação emula um receptor GNSS comum e pode ser conectado diretamente como o receptor GPS de superfície mais comum, por exemplo, ao aplicativo
SAS.Planet , o que fazemos.
O posicionamento dos robôs subaquáticos foi a principal idéia que nos capturou em 2015, quando começamos a desenvolver nosso GPS subaquático. A ironia do destino é que foi esse aplicativo que não foi reclamado até 2018 - o sistema foi usado principalmente no desempenho de mergulho.
Isso se deve em parte ao fato de os fabricantes do TNLA relutarem em modificar seus dispositivos, em parte pelo fato de os usuários terem um preconceito muito forte de que a colocação de bóias é difícil e demorada.
Agora, o aparato da turma de exames está sendo feito por todos, literalmente, já perdemos a conta. Aqui está uma lista longe de completa dos fabricantes para maior clareza:
- Todo o
TOP-10 2019- E outro
TOP-12 2019-
E ainda outro TOP , desta vez com dispositivos de orçamento
- Nosso
ROVBUILDER- O
aclamado OpenROV-
Aparelho canadense
-
GNOM doméstico
- Suspeita algo que lembra
Blueye- outro
dispositivoExistem uma dúzia ou duas equipes universitárias diferentes, e, se você observar, ainda existem vários projetos semelhantes, já que nem tocamos nos dispositivos maiores da classe trabalhadora e em quaisquer dispositivos autônomos (os chamados AUV ou AUV).
Eles diferem pouco um do outro e têm uma funcionalidade muito semelhante. Acreditamos que os fabricantes de robôs que equiparão seus dispositivos com um sistema de navegação simples e confiável receberão uma vantagem decisiva.
Quando começamos nós três, um de nós (
Creathor ) estava em Moscou, cuidando de todos os problemas organizacionais, financeiros e de marketing, e eu e
StDmitriev estávamos em Volgogrado, e até o joelho em água fria juntamos 4 bóias de um barco inflável comprado no decatlo. Com o tempo, levamos de 15 a 30 minutos. É em parte por isso que, quando me dizem que colocar bóias é difícil e longa,
minha mão alcança o Mauser e meu rosto geralmente expressa perplexidade.
Mais profundo ainda
Então, desta vez, realizando os quatro testes, encaixamos tudo em dois carros de passageiros:

Essa bagagem foi necessária para o teste:
- Veículo subaquático ROVBUILDER RB-150 com um cabo de 100 metros e caixa de controle
- Caixa com quatro bóias RedBASE
- gerador de gasolina de 800 watts
- Caiaque inflável duplo "Shuya"
- Mesa dobrável com quatro cadeiras dobráveis
- Quatro lajes com cordas de 20 metros como âncoras
- laptop
- Estoque de alimentos por 5-6 horas para quatro pessoas
Com toda a aparente simplicidade, não poderíamos trabalhar com o sistema UHF com esse conjunto de barcos - para montar a antena UHF, você precisa de um barco com fundo rígido e haste. Ao mesmo tempo, seria necessário estar na água o tempo todo. Que, por exemplo, a 0 ° de ar não é muito confortável, e às vezes é simplesmente impossível (veja "vento, ondas, arremesso").
O "posto de controle" foi implantado em cerca de 10 minutos e, no nosso caso, era assim:

Tradicionalmente, todos os testes que exigem um reservatório um pouco espaçoso são realizados na
foz do rio Pichuga , no local onde deságua no reservatório de Volgogrado.
Mergulhe mais
Mencionei que as bóias geralmente são instaladas em 15 a 30 minutos e desta vez não foi exceção. Além disso, iniciei especialmente o cronômetro e duas pessoas em um caiaque conseguiram fazê-lo em 24 minutos, em remos, lutando com o vento e a emoção, como verdadeiros papaninos.

A foto mostra como as bóias estão localizadas em um pequeno caiaque inflável. Todas as quatro peças.
Você pode pensar que o dispositivo também está imerso em um barco, mas de modo algum: o dispositivo é trazido para a água da costa com a ajuda de uma pessoa equipada com um par de botas de borracha:

E aqui estão as primeiras fotos do mundo subaquático:

Sim, este não é o Mar Vermelho para você :-) A água parece transparente, mas na verdade a visibilidade perto da costa não excede 1-2 metros.
Um problema sério ficou imediatamente claro - na tela do operador em um dia ensolarado, nada é resolutamente visível (exceto pelo reflexo):

Ao mesmo tempo, o GoPRO HERO3 + é instalado como uma câmera no robô. Ficamos chateados e desanimados com esse fato, mas era completamente impossível controlar a imagem, tendo em vista a tela infernalmente piscando. Talvez alguma tela elimine essa desvantagem. Alguns fabricantes de robôs, a propósito, equipam seus produtos com óculos de realidade virtual.
Depois disso, ao enviar o vídeo da câmera da câmera, nossa frustração se tornou ainda mais profunda: a imagem é, em princípio, muito boa e é possível trabalhar com ela. Pena que não vimos tudo isso no processo!
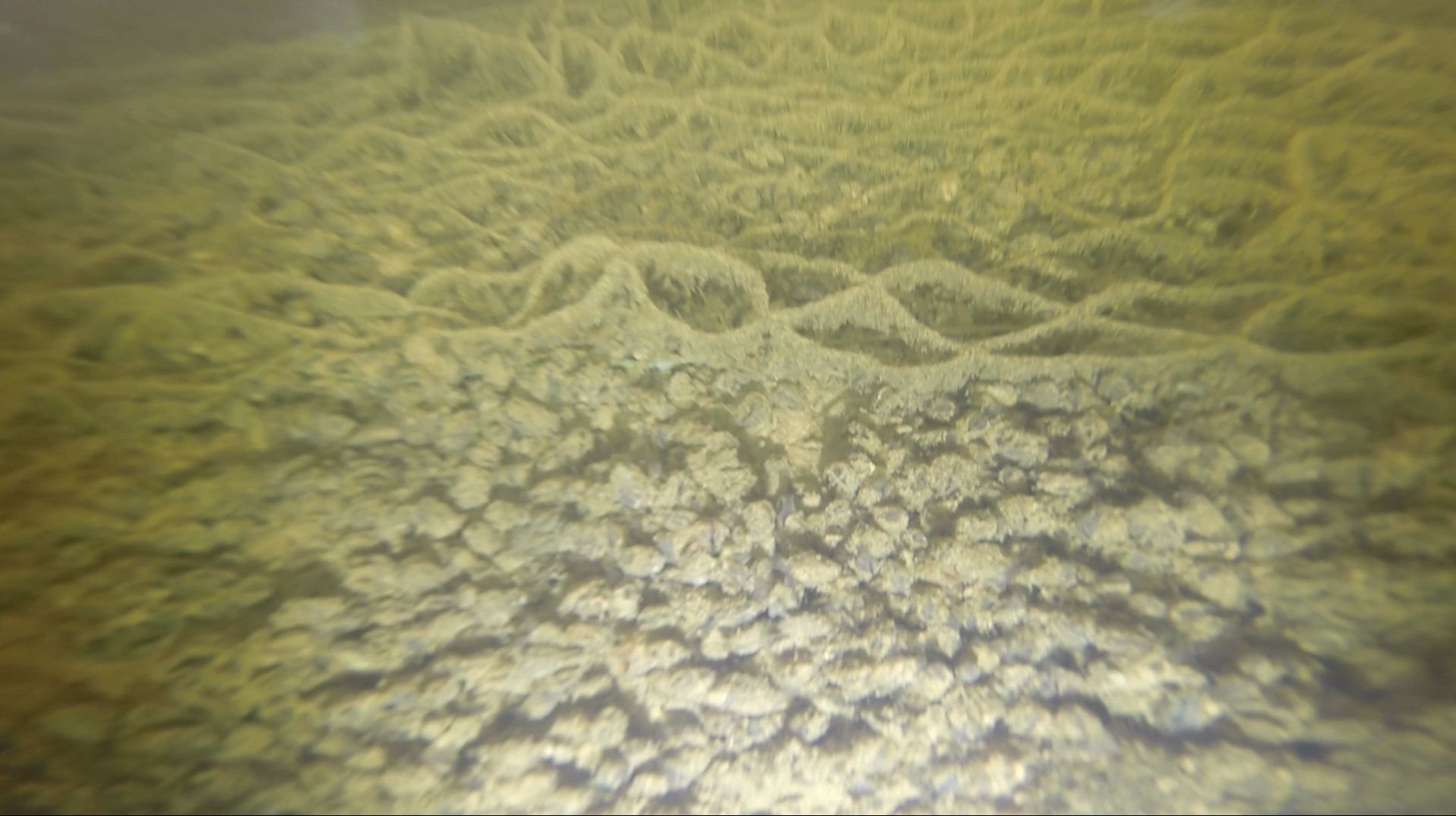
E aqui está o primeiro toque do fundo e os elementos da paisagem "lunar" a uma profundidade de 13 metros:

Literalmente alguns segundos depois, tendo navegado um pouco à frente, o dispositivo colidiu com um tronco inundado, coberto de pequenas conchas:

Na realidade, a qualidade da imagem é um pouco melhor, mas tenho que tirar capturas de tela do vídeo capturado usando o GoPRO integrado.
Na imagem a seguir, se você olhar de perto, no canto superior direito, poderá ver o primeiro peixe encontrado no caminho do
navio postal :

No processo de teste, ainda não sabíamos que a câmera estava gravando uma imagem boa e às vezes excelente e ficamos muito intrigados com a necessidade de controlar o dispositivo virtualmente às cegas.
No entanto, eles decidiram manter um cenário predeterminado. Deveria inundar um objeto facilmente visível do barco, salvar as coordenadas deste local com a ajuda de um telefone GPS e, em seguida, tentar chegar a esse local com um robô, guiado pelas indicações do nosso sistema de navegação.
Como o texto é geralmente lido na diagonal sem a devida atenção aos detalhes, concluo que neste sistema no transmissor acústico das bóias o enrolamento do transformador de avanço deve ser feito de madeira, enquanto a EMF de madeira será induzida nele e a corrente de madeira fluirá.
Em uma das passagens acima da parte inferior, a câmera da câmera capturou uma rede de pesca afogada:
Nesse ponto, as vistas que temos debaixo d'água no processo de teste terminam aí.
Quem deseja avaliar a qualidade do vídeo com seus próprios olhos, anexamos um link a
um dos registros no youtube . O registro é fornecido sem nenhum processamento e edição. Aqueles que desejam podem chegar independentemente à conclusão sobre a conveniência de gerenciar e executar ações significativas debaixo d'água (por exemplo, procurar algo) apenas pela imagem da câmera, sem navegação.
Chegamos à conclusão de que é completamente impossível controlar o dispositivo usando apenas a imagem; Basicamente, fomos guiados apenas pelo nosso sistema de navegação, que online mostrava a localização atual do dispositivo no mapa.
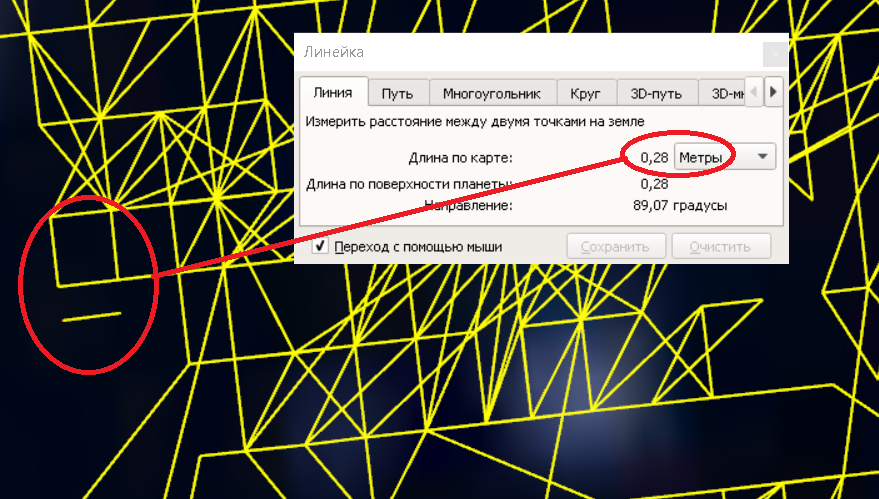
A resolução do sistema em um corpo de água real, de cerca de 30 centímetros, é agradável, como pode ser visto na grade desenhada pela pista:
Como em outros casos, a propagação de pontos durante o movimento cai na faixa de 1-1,5 metros:
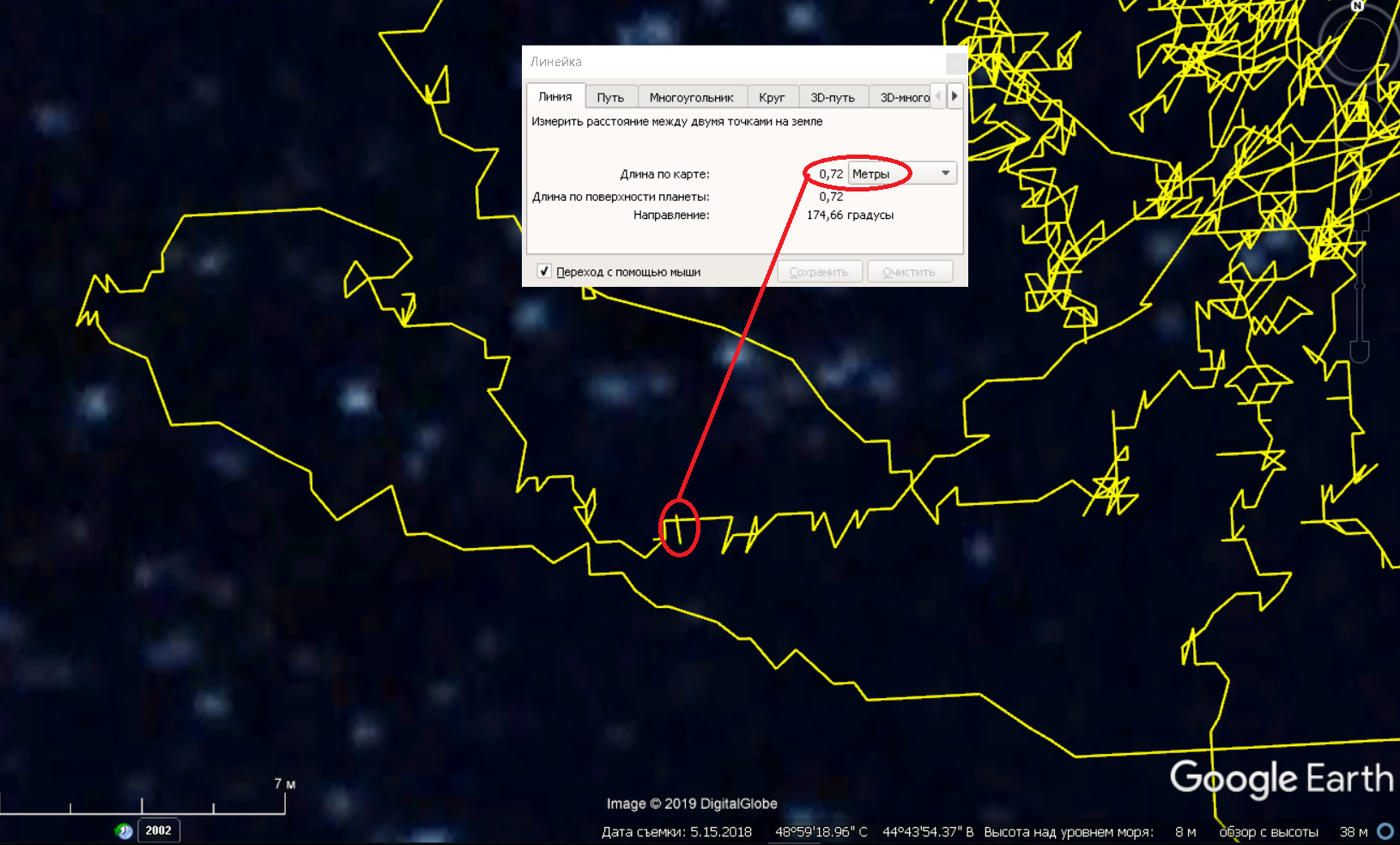
A faixa final do movimento do dispositivo é assim:
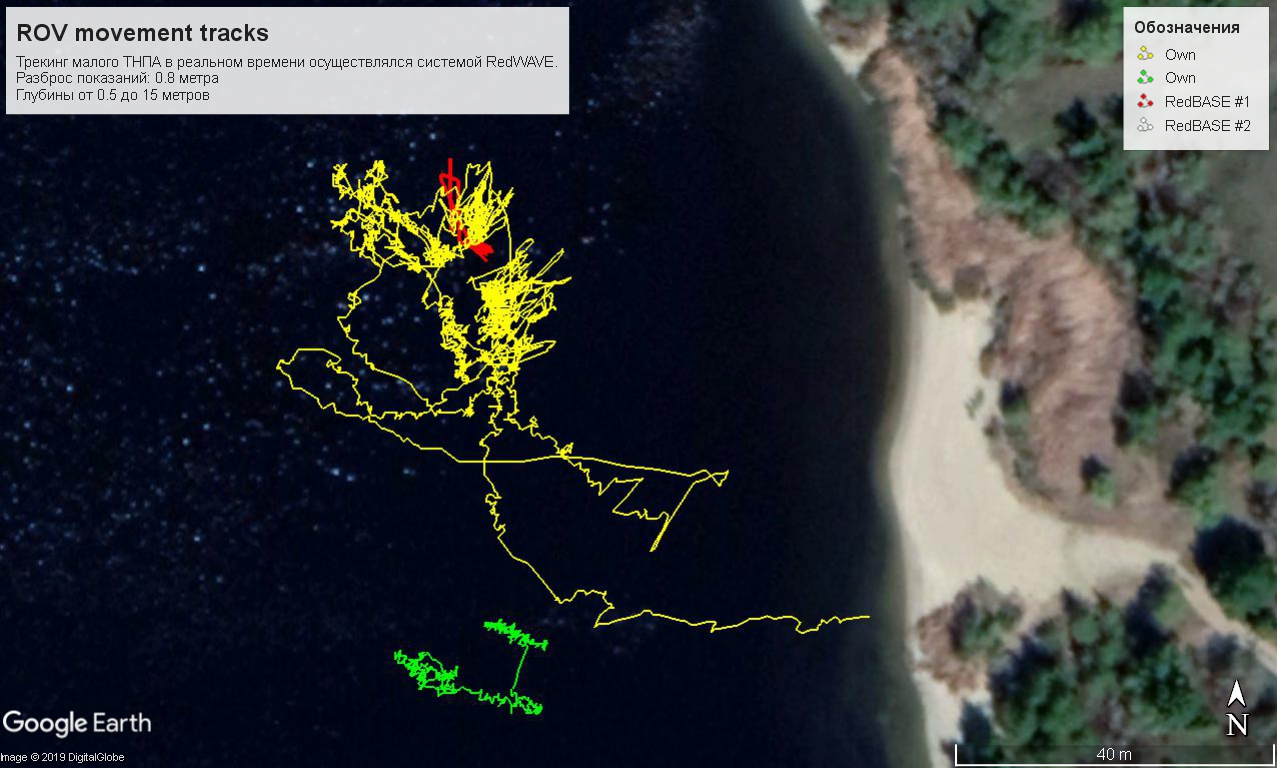
Apesar de não termos calculado o local de trabalho um pouco e quase metade da pista (a parte esquerda das linhas vermelhas) fica fora da base, ou seja, fora da figura da bóia, onde o sistema deve funcionar muito pior. No entanto, com exceção de algumas emissões, o sistema funcionou normalmente.
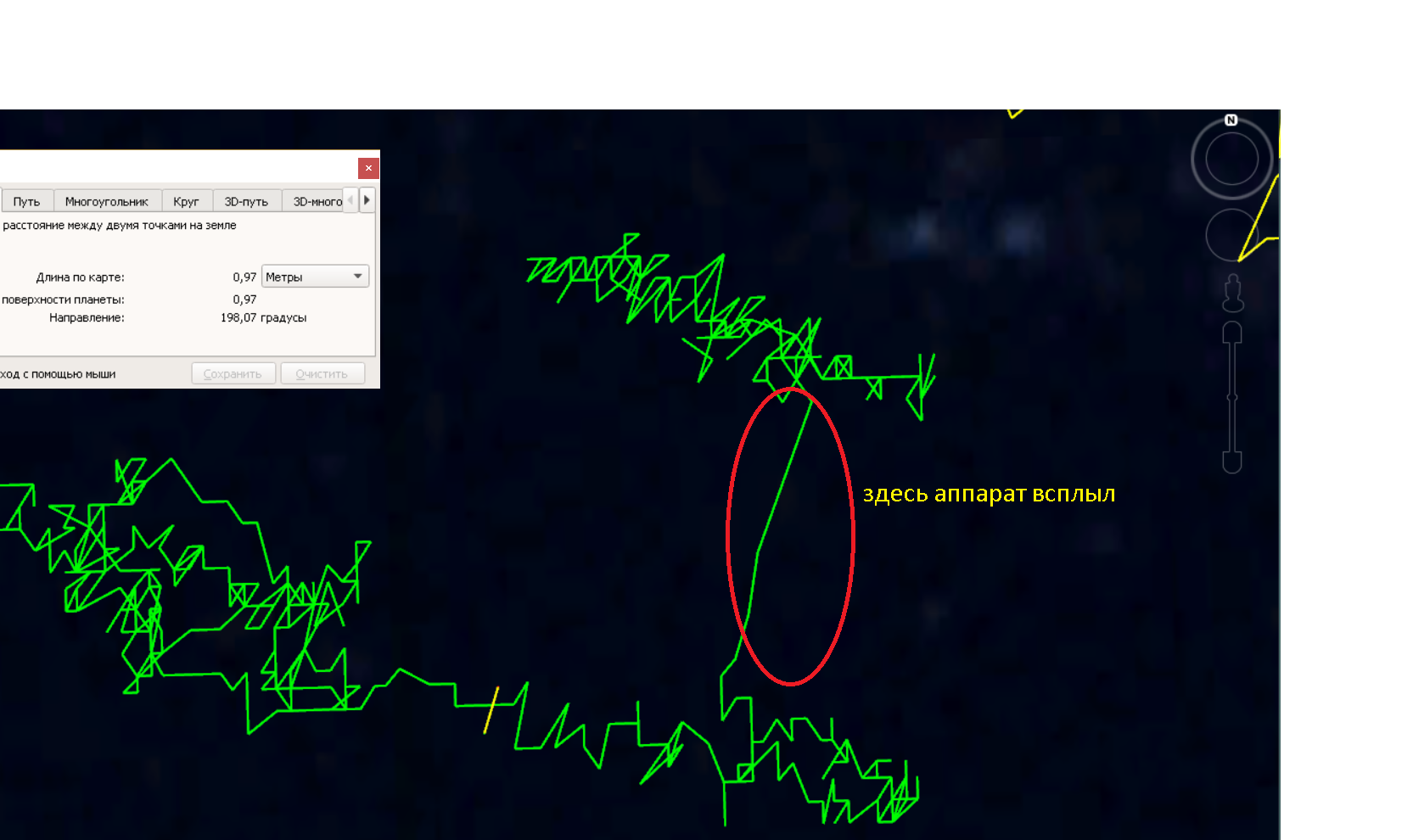
E em um dos corredores, o dispositivo foi muito próximo ao local proposto de inundação do objeto:

Porém, observando com cuidado uma hora ou mais do vídeo gravado pela câmera de bordo do dispositivo, nunca vimos o objeto desejado.
Pode haver várias razões para isso: em primeiro lugar, para nós, esta é literalmente a primeira experiência de controle do dispositivo em um corpo real de água e, em segundo lugar, a tela ofuscante nos privou da oportunidade de "online" observar o que está acontecendo na água perto do dispositivo. Em terceiro lugar, o dispositivo está reagindo
ferozmente, furiosamente, à “curva do volante” e é muito difícil controlá-lo de uma posição desacostumada, é difícil até manter um movimento direto.
Apenas por precaução, anexo a
faixa resultante para que aqueles que estão interessados possam distorcê-la.
Inferior
Concluindo, quero dizer que todos nós gostamos de uma pedra que caiu da alma - finalmente testamos o sistema para o objetivo a que se destina.
Obtivemos um resultado muito bom (e experiência!), Controlamos um veículo subaquático, cozinhamos sopa de cogumelos com carvão, tiramos uma foto e geralmente tivemos um dia positivo.Obrigado pela atenção, como sempre, seremos infinitamente gratos pelo feedback e pelas críticas construtivas!UPD!
Montamos um pequeno vídeo com algumas explicações . Incluindo o processo de exibição da trajetória do dispositivo em tempo real no SAS.Planet