Se você já escreveu um software para controlar um braço de robô ou qualquer mecanismo semelhante a um robô em geral com mais de três graus de liberdade, sabe que na maioria das vezes leva para programar os movimentos. Agora imagine que você construiu um braço de robô conectando os links e as unidades como desejar, e o software determinou os comprimentos dos links, sua localização, ângulos de rotação e assim por diante.
Foi exatamente isso que os pesquisadores da Columbia Research fizeram ao escrever um software que
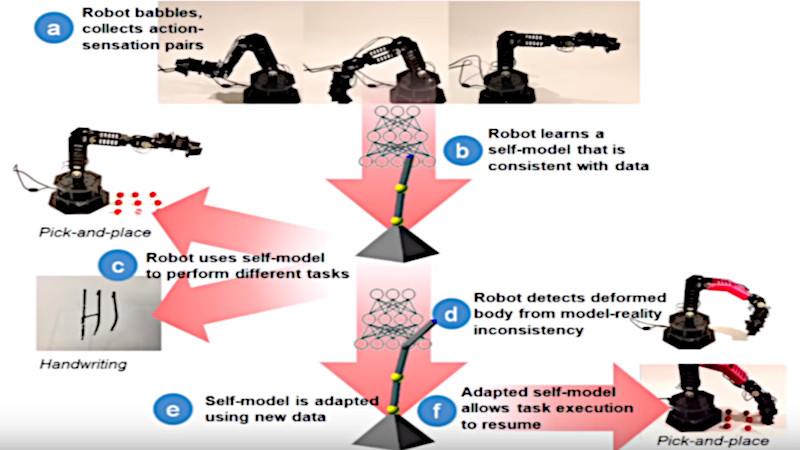
aprende a montar um braço robótico controlado por ele , sem ter uma ideia inicial da física, geometria ou características dinâmicas dos motores. Imediatamente após o primeiro lançamento, ele não sabe qual a forma do robô, como seus motores funcionam, como e o que cada um deles afeta. Por cerca de um dia e meio, fazendo movimentos cautelosos que parecem aleatórios e recebendo feedback sobre o que está acontecendo, o software que usa treinamento detalhado configurará o simulador incorporado para que o robô virtual seja o mais físico possível.
O gerente de projetos Lipson e seu aluno Robert Kwiatkowski estão experimentando um braço de robô articulado com quatro graus de liberdade. No início do treinamento de software, o modelo era impreciso e a ordem de vinculação não foi definida. Após 35 horas de treinamento, o modelo correspondia à realidade com uma precisão não inferior a quatro centímetros. Em seguida, o software forçou o roboruk a pegar e mover objetos, enquanto havia uma recalibração adicional após cada movimento, de acordo com o modelo formado apenas por treinamento independente.
Para determinar se esse software pode detectar danos no braço robor, um similar, mas especialmente deformado, foi impresso no lugar de uma das peças. O software determinou que havia sido alterado e fez as alterações apropriadas no modelo. Logo, ele executou as tarefas de levantar e mover objetos apenas um pouco pior.
Como a idéia interna do software sobre o dispositivo do robô não é estática, isso permite não apenas agir cada vez melhor, mas também se adaptar a danos e mudanças estruturais. Além disso, tudo continuará a funcionar com o desgaste gradual das peças e sua substituição por formas ligeiramente diferentes.
Obviamente, um roboruk gerenciado por esse software não se tornará tão preciso quanto o
Dexter, um roboruk com software tradicional que ofereceu a seus desenvolvedores um prêmio na competição Hackaday de 2018 , mas é interessante ver como funciona: