Oi Habr. Neste artigo, falarei sobre um simples robô de rastreamento controlado feito de uma unidade de CD antiga. Quero transmitir apenas uma ideia, não um design específico, para que todos possam criar algo semelhante aos detalhes disponíveis, se desejarem. O artigo tem muitas fotos claras e três gifs, totalizando 25 MB.
Se alguém gosta de assistir mais vídeos,
aqui está um vídeo sobre esse robô .
Muitos entusiastas da eletrônica pensam no que pode ser feito a partir de unidades de CD desatualizadas em nossos dias. A aplicação mais comum é um gravador a laser da cabeça do laser de um gravador de DVD e uma tabela de coordenadas com dois movimentos dessa cabeça. As portas automáticas geralmente são feitas de uma mesa deslizante para um disco (por exemplo, para gatos ou hamsters). Fiz dois brinquedos de uma mesa dobrável: um "carro inútil" e um robô rastejante. Não vou falar de um carro inútil, porque é muito simples. Quem se importa, você pode assistir a um
vídeo sobre ela .
No entanto, a ideia de um robô de rastreamento também é muito simples. Se alguém não estiver familiarizado com o design de uma unidade de CD,
você pode ler sobre isso na Wikipedia .
Vou começar com uma descrição teórica. A figura abaixo mostra uma unidade de CD com rastreamento ao lado. Ele tem duas rodas girando livremente na parte traseira, chamadas "rodas de apoio". Na frente, há um "volante" com seu próprio motor. Abaixo, existem dois suportes extensíveis para elevar o volante.
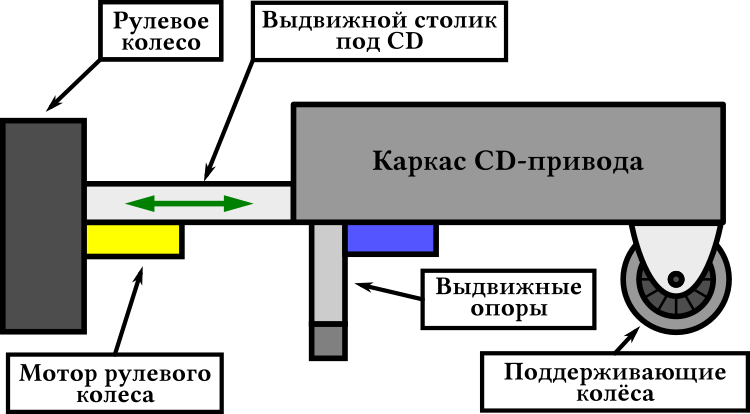
Na figura a seguir, porém, a vista frontal acabou sendo pouco compreendida.

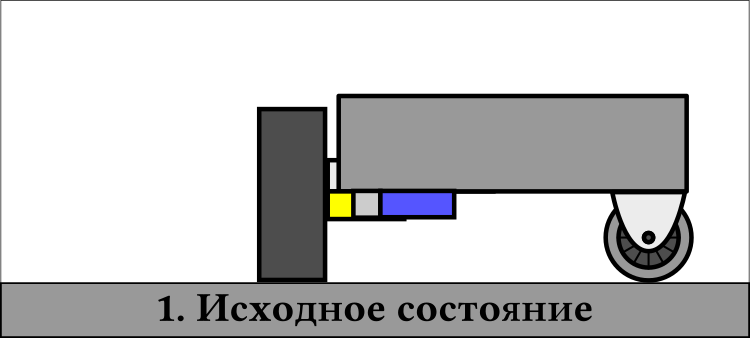
Como esse sistema se arrasta também é mostrado nas figuras. Portanto, existe um estado inicial quando a mesa deslizante do CD e os suportes são inseridos. A partir dessa posição, o robô começa a avançar, recuar e executar uma curva.
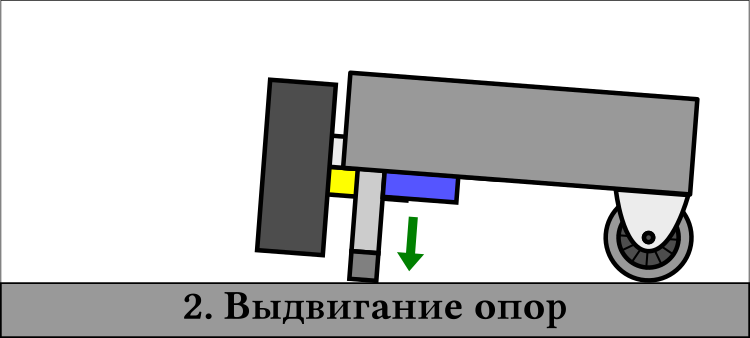
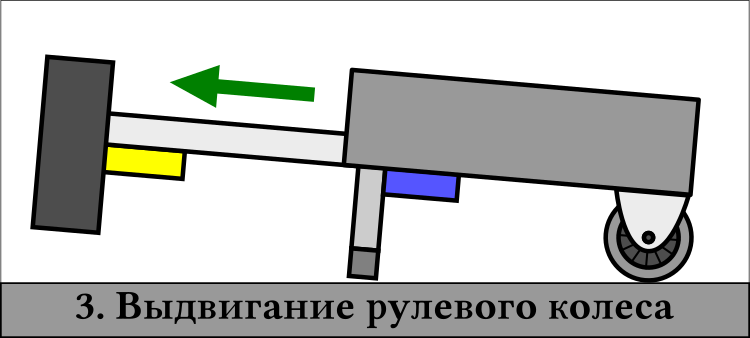
Para avançar, os suportes primeiro se estendem, elevando o volante.
Em seguida, a mesa do CD se estende junto com o volante.
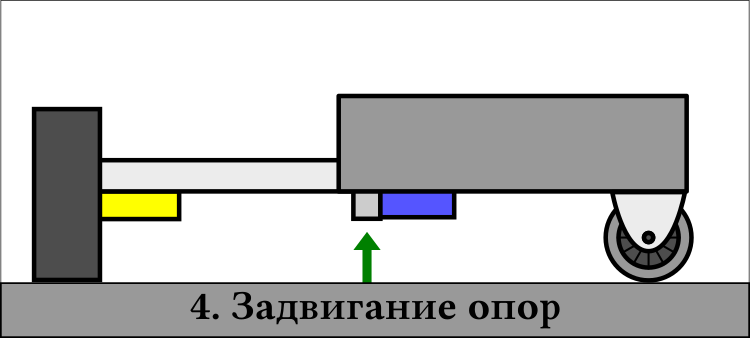
Além disso, os suportes retraem e o volante abaixa.
Agora resta retornar ao seu estado original deslizando a tabela para o CD.
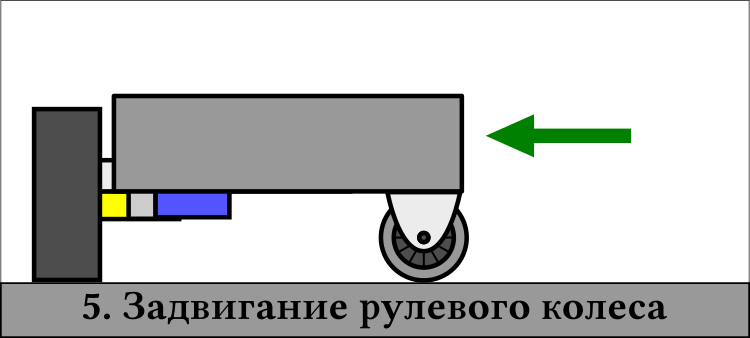
Nesse caso, o volante se agarra à superfície do piso, de modo que toda a estrutura da unidade de CD é puxada para o volante. Em seguida, o ciclo se repete.
Para ligar o robô no estado inicial, o motor do volante é ligado, enquanto todo o sistema começa a girar 360 graus em torno de um eixo localizado em algum lugar entre as rodas de suporte.
Se você entender como isso funciona, não será difícil imaginar como o movimento para trás é realizado.
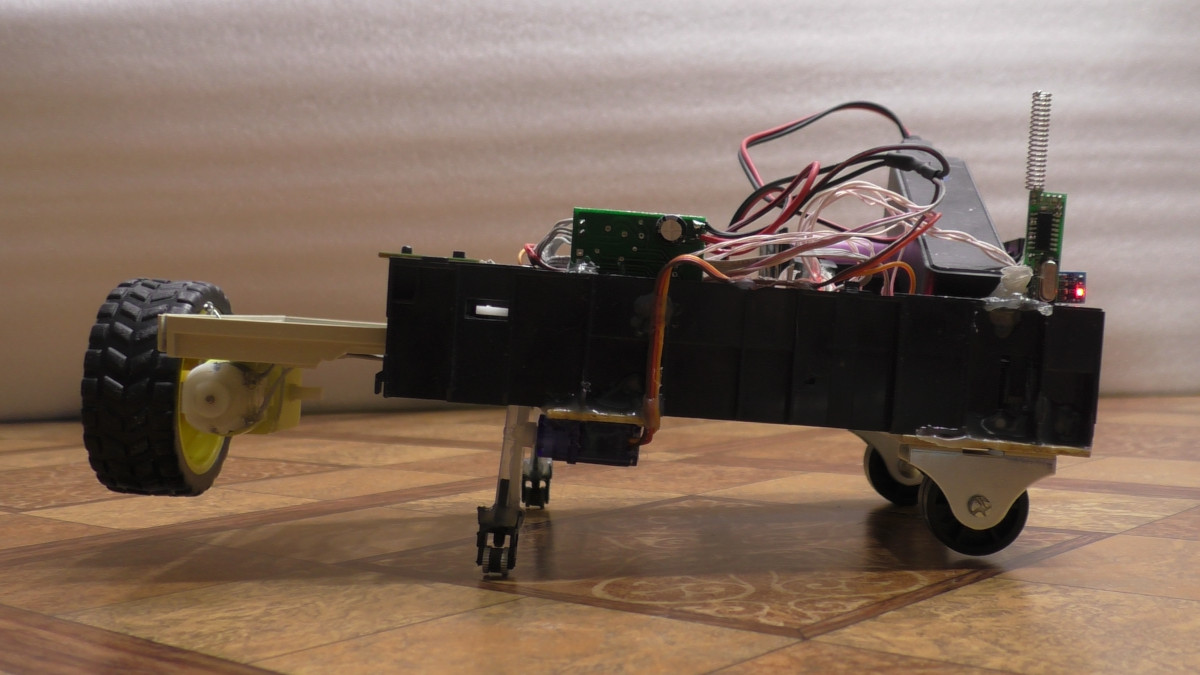
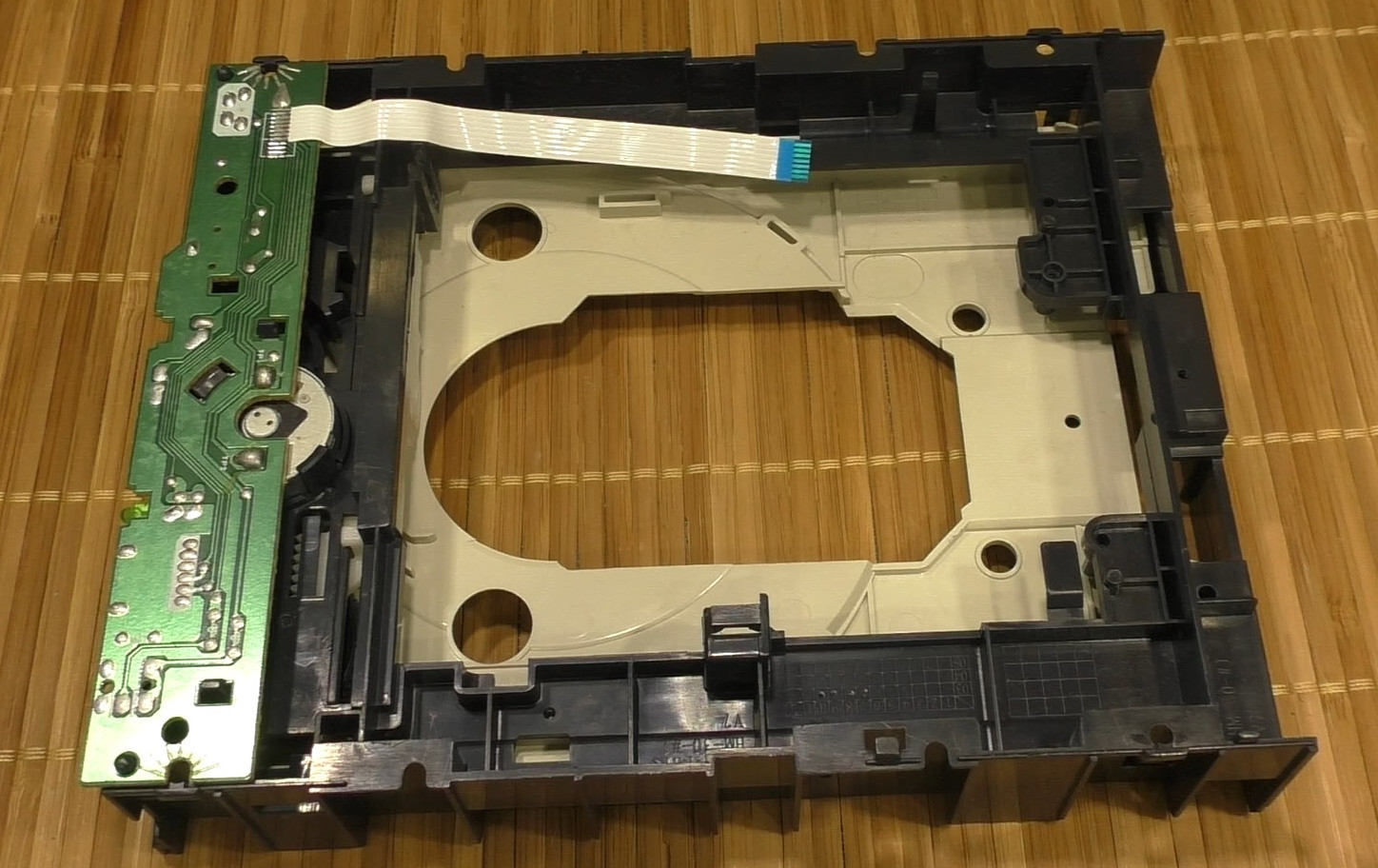
Agora um pouco sobre minha implementação. Não vou contar em detalhes, já que tudo foi feito de maneira aleatória, apenas para verificar a capacidade de trabalho da ideia. Usei uma unidade de CD simples como base, tirei toda a óptica com um slide, havia apenas uma armação de plástico com uma mesa deslizante, um motor e interruptores de botão para a mesa.
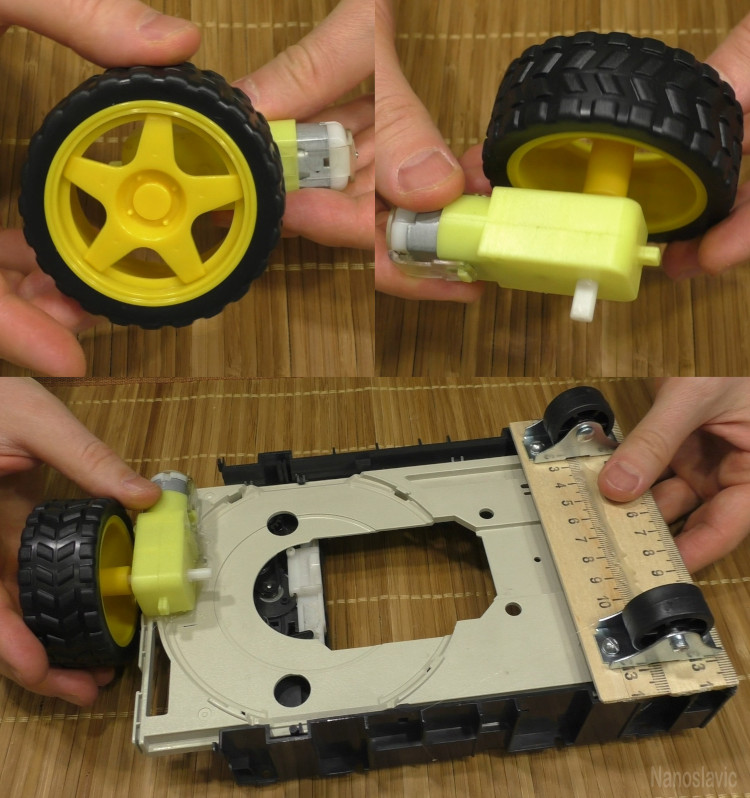
Rodas de móveis anexadas como rodas de suporte.
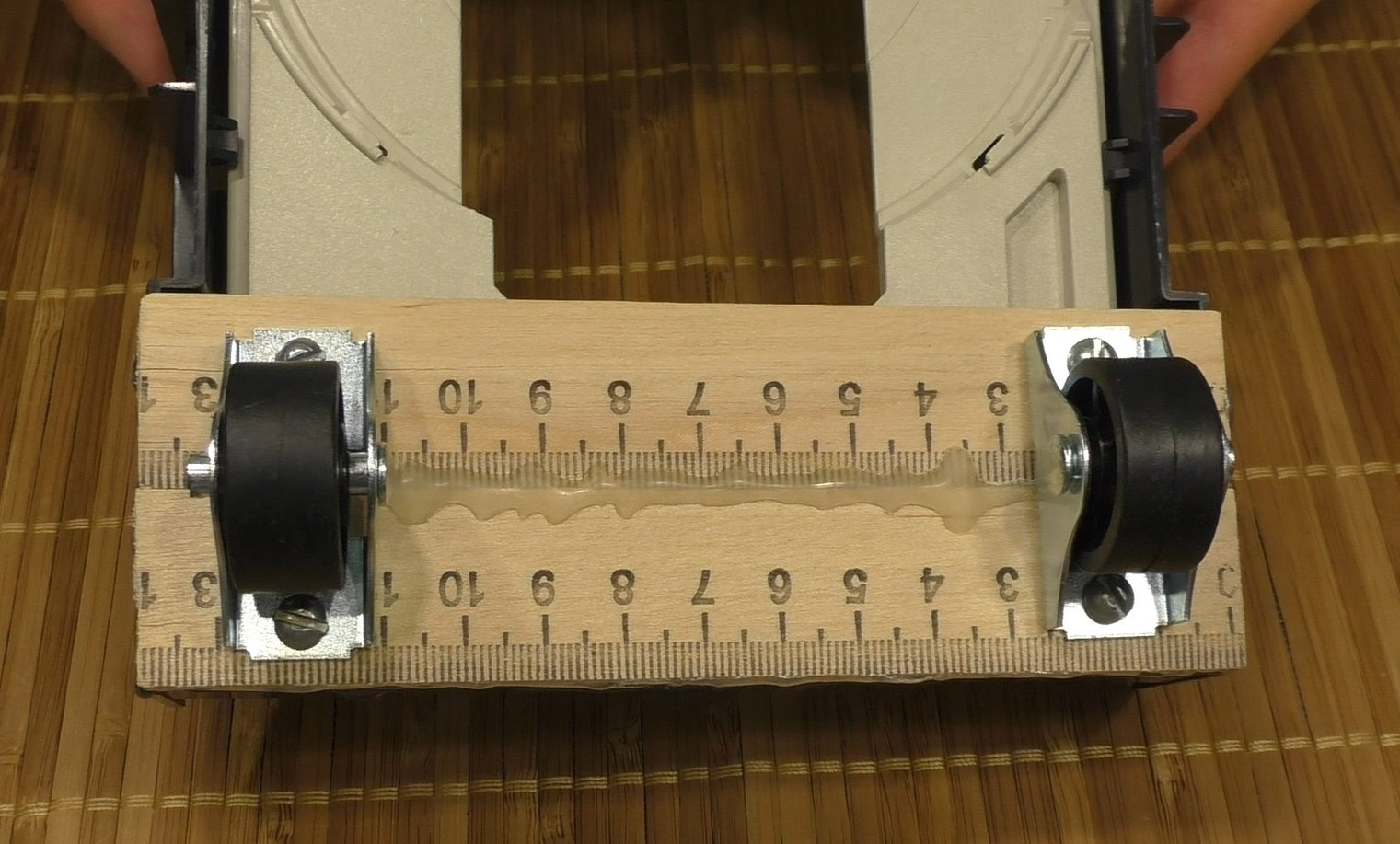
Comprei o volante separadamente em algum lugar da Internet. Ele tem um motor e uma caixa de velocidades de plástico.
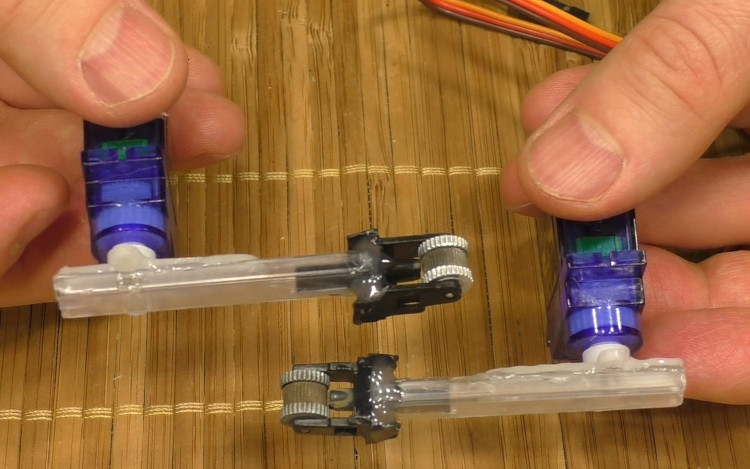
Suportes retráteis feitos de tubos de plástico, que são vendidos em cavacos a granel no compartimento SO8. Prendi uma cadeira dos isqueiros a eles, depois de remover a pederneira e a mola deles, para que a cadeira pudesse girar livremente. Para estender os suportes, foram utilizados dois servos baratos. Tudo é montado principalmente em adesivo hot-melt.
A eletrônica foi feita do que era, por isso não é ótima. Para controlar os motores da mesa de CD e do volante, foi utilizado um circuito de ponte com transistores. Isso tornou possível alterar a direção da rotação. Como lógica - algum tipo de placa arduino. Para controlar o movimento, ele pegou um chaveiro e um circuito de resposta do receptor a uma frequência de 434 MHz.

Para alimentar os motores, conectei três baterias de íon-lítio em série sem nenhuma proteção; por isso, liguei-o com cuidado, às vezes verificando sua carga. Para alimentar a parte digital e o rádio, usei um pequeno banco de energia barato, emitindo 5 V.
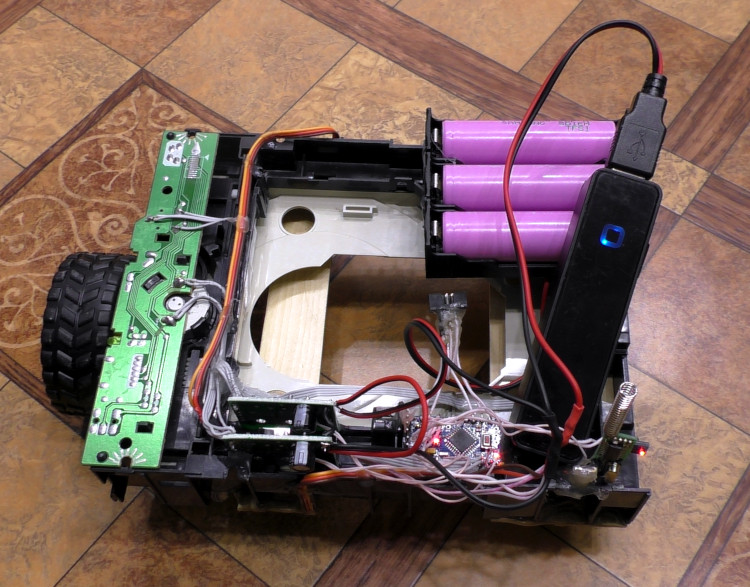
As baterias na parte traseira são muito úteis, pois o volante pesa bastante quando se empurra para frente.
O programa de controle, quando ativado, verifica as extremidades da gaveta do CD e restaura o sistema ao seu estado original. Para controle, são utilizados 4 botões. Quando você pressiona o botão "Avançar", o movimento para frente começa. Parar e retornar ao estado inicial do sistema ocorre quando você pressiona qualquer botão no controle remoto. Quando o botão "Voltar" é pressionado, ele se move para trás, também com uma parada quando qualquer botão é pressionado. Os botões Esquerdo e Direito funcionam apenas no estado inicial e somente enquanto são pressionados.
Como resultado, verificou-se que apenas o movimento para frente funciona normalmente. Ao recuar, o centro de gravidade muda bastante quando o volante é estendido, de modo que os suportes não podem levantá-lo normalmente. Precisa de servos mais poderosos. Como o sistema sempre retorna ao seu estado original, o movimento é possível apenas com as "etapas" determinadas pelo comprimento da tabela do CD, mas essa é uma limitação puramente de software.
E, finalmente, alguns gifs.
Movimento para frente, vista lateral, 6,8 MB Movimento para frente, vista superior, 7,8 MB Girar, ver de cima, 6,3 MB Eu acho que todo o sistema pode ser simplificado criando um painel de controle em um loop e controlando os motores com botões e interruptores. Para controlar os servos, você pode criar um gerador simples nos temporizadores 555. A energia pode ser obtida com baterias comuns e colocá-las no controle remoto, reduzindo o peso do robô. Esse controle remoto permitirá que você controle o robô completamente manualmente.
Obrigado a todos por sua atenção e boas artes para você.