GPS ultra-sônico. Modelo conceitual
Antes de iniciar uma viagem tão longa, vale a pena verificar se tudo é realmente feito no joelho.
Sobre o que é este artigo: como criar de forma rápida e barata um GPS ultrassônico simples.
Lista de dispositivos necessários
- HC-SR04 3 Pcs.
- Arduino 1 Pcs.
- Uma bobina de fios.
Conceito
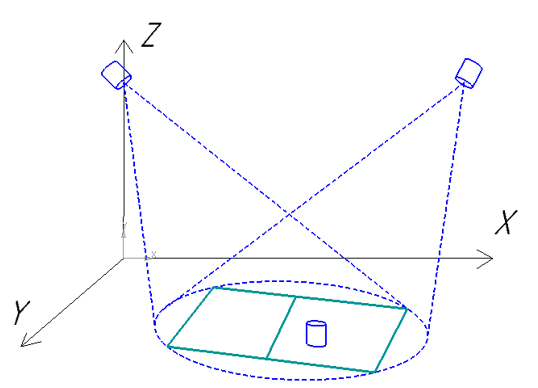 Fig. 1 - Ideia geral do dispositivo
Fig. 1 - Ideia geral do dispositivoNos cantos superiores da sala, está instalado o HC-SR04, que desempenha o papel de emissores, o terceiro está de cabeça para baixo no chão com o receptor e desempenha o papel de um receptor para nós.
Tudo isso está conectado de acordo com o esquema:
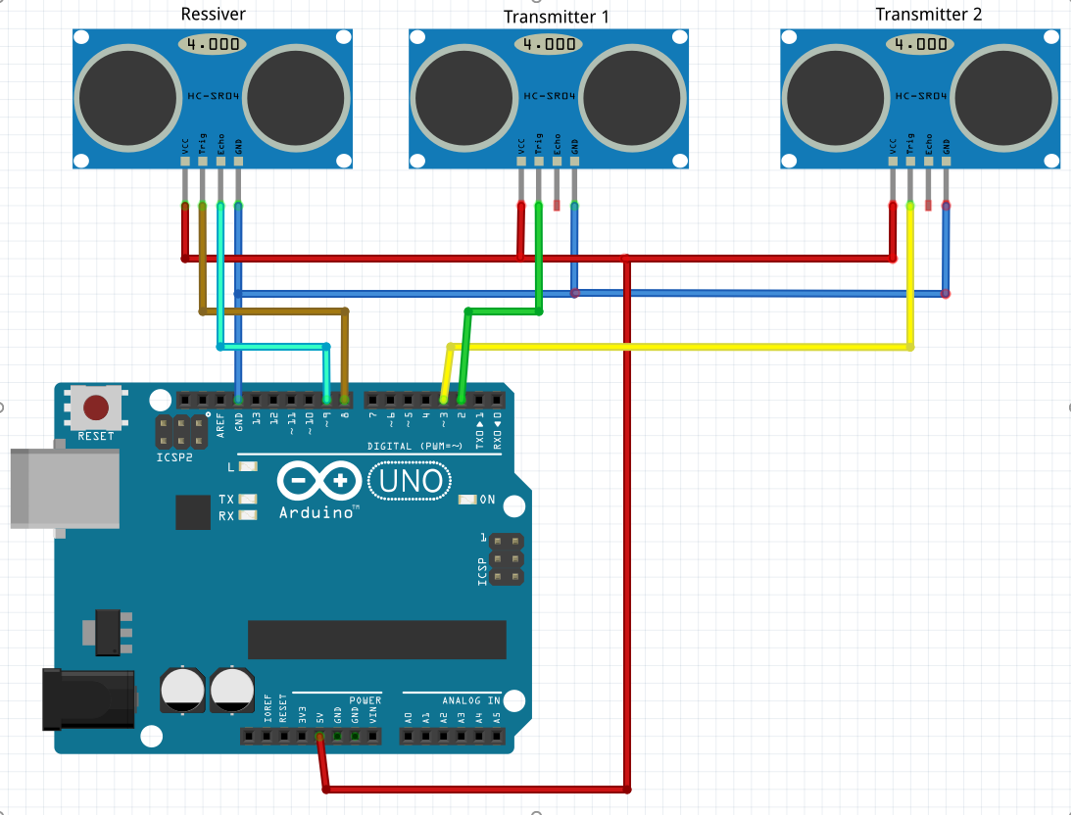 Fig. 2 - Diagrama de conexão do dispositivo
Fig. 2 - Diagrama de conexão do dispositivoE é claro que você conecta o Arduino via USB a um computador.
Como tudo funciona:
- Meça a distância do receptor ao emissor 1
- Envie um sinal sobre o início da medição da distância para o receptor e o emissor 1 (puxe as pernas do Trig com ele).
- Aguarde até que o receptor nos dê o comprimento.
- Repita o mesmo para o emissor 2.
- Calcular coordenadas do receptor.
Lembre-se da geometria da escola
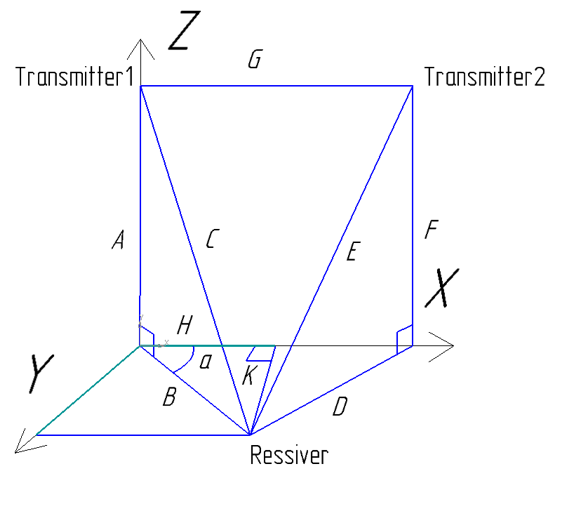 Fig. 3 - Representação geométrica do problema
Fig. 3 - Representação geométrica do problemaCom base nesta figura, compomos as fórmulas para calcular as coordenadas:
A, F é a altura dos emissores em relação ao receptor;
C, E são os comprimentos obtidos medindo a distância dos emissores ao receptor;
G é a distância entre os emissores.
Prática
Instale dois radiadores sob o teto, a uma distância decente um do outro (3 metros), direcione-os com radiadores em um ponto, ao redor do qual sua área de trabalho será formada.
Monte o receptor em algo plano (por exemplo, um pedaço de uma placa) e enrole-o com fita adesiva, para que não produzamos ruído ultrassônico desnecessário na sala.
Conecte tudo de acordo com o esquema apresentado acima.
É assim que os fixadores dos emissores e o substrato do receptor podem ser:
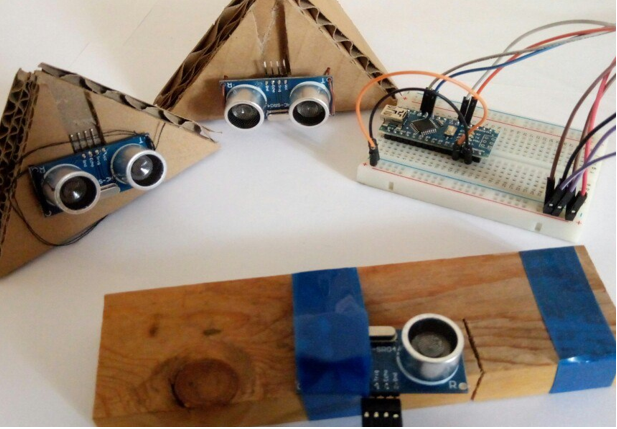 Fig. 4 - Tipo de módulos
Fig. 4 - Tipo de módulosO programa
Considere as partes principais do código em mais detalhes.
Nós forçamos o emissor 1 e o receptor a começar a medir a distância movendo a entrada Trig desses dispositivos de baixo para alto, 10 microssegundos e de volta para baixo.
digitalWrite(trigPinRessiv, LOW); digitalWrite(trigPinTransmit1, LOW); delayMicroseconds(5); digitalWrite(trigPinRessiv, HIGH); digitalWrite(trigPinTransmit1, HIGH); delayMicroseconds(10); digitalWrite(trigPinRessiv, LOW); digitalWrite(trigPinTransmit1, LOW);
Normalmente, esses dispositivos emitem um sinal de ultrassom e esperam até que seja refletido por alguma coisa e voltam a eles. Mas estamos enganando-os, no nosso caso, um envia e o outro recebe, aquele que recebeu pensa que é o seu sinal, embora seja um sinal de outro dispositivo, e nos dá a distância para esse outro dispositivo.
Esperamos até que o sensor comece a nos dizer a duração do vôo do sinal ultrassônico:
while (digitalRead(echoPinRessiv) == LOW);
Registre a hora de início do sinal:
timeStartSignal = micros();
Esperamos até o sensor parar de nos dizer a hora do voo do sinal ultrassônico:
while (digitalRead(echoPinRessiv) == HIGH);
Escrevemos o tempo final:
timeEndSignal = micros();
Usando uma fórmula simples, calculamos a distância do emissor ao receptor:
lenC = ((timeEndSignal-timeStartSignal)/58.00)*10.00;
Esperamos até que o ruído do ultrassom diminua na sala:
delay(100);
Vale a pena notar que o sensor nos indica a distância diminuindo a saída de eco para Baixa por um período diretamente proporcional à distância medida.
A mesma coisa é repetida para o segundo emissor.
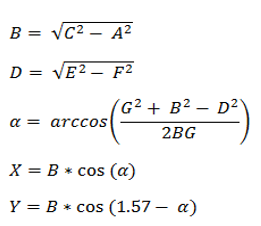
Usando as regras de um triângulo retângulo, projetamos a distância resultante no plano do piso (Fig. 3).
Implementamos a fórmula do software para a transição das coordenadas tridimensionais para o plano; a fórmula é apresentada acima:
lenB = sqrt((lenC*2.00)*(lenC*2.00) - lenA*lenA);
Infelizmente, temos erros e, para removê-los, criei uma fórmula tão experiente, exclua-a e veja o que você recebe.
measurementError = 26.437 - 0.08*lenC/10; lenB = (lenB + measurementError*10)/10.00;
Repita o mesmo para o sensor 2.
Calculamos as coordenadas no plano
Encontre o ângulo Alfa:
alfa = acos(((lenG*lenG + lenD*lenD - lenB*lenB)*1.00) / ((2*lenE*lenG)*1.00));
Encontre as próprias coordenadas:
koord_X = lenE*cos(1.57-alfa); koord_Y = lenE*cos(alfa);
Se o valor das coordenadas for além do possível, substitua-o pelo valor anterior:
if((koord_X > 0) && (koord_X < 500) && (koord_Y > 0) && (koord_Y < 500)) { oldKoord_X = koord_X; oldKoord_Y = koord_Y; }else{ koord_X = oldKoord_X; koord_Y = oldKoord_Y; }
Fazemos um buffer para 6 valores de coordenadas e o mudamos constantemente:
koord_X5 = koord_X4; koord_X4 = koord_X3; koord_X3 = koord_X2; koord_X2 = koord_X1; koord_X1 = koord_X; koord_Y5 = koord_Y4; koord_Y4 = koord_Y3; koord_Y3 = koord_Y2; koord_Y2 = koord_Y1; koord_Y1 = koord_Y;
Obtemos o valor médio para as últimas 6 medições:
averageKoord_X = (koord_X + koord_X1 + koord_X2 + koord_X3 + koord_X4 + koord_X5)/6; averageKoord_Y = (koord_Y + koord_Y1 + koord_Y2 + koord_Y3 + koord_Y4 + koord_Y5)/6;
Envie as coordenadas para o PC:
Serial.println(averageKoord_X); Serial.println(averageKoord_Y);
Funções:
float asin(float c) float acos(float c) float atan(float c)
basta pegar e usar =)
Código inteiro:
int trigPinRessiv = 8; int echoPinRessiv = 9; int trigPinTransmit1 = 2; int trigPinTransmit2 = 3; int i; long lenA = 2700;
Portanto, temos o sistema GPS ultrassônico mais simples, com um metro por metro de alcance, o vídeo mostra como tudo funciona.
A visualização da trajetória é feita no Matlab, vou escrever como fazer a mesma visualização no próximo artigo.
Em artigos futuros, considerarei mais profundamente as várias partes deste sistema e tentarei melhorá-las.
Ficarei feliz em ouvir suas opiniões e comentários sobre este tópico, o projeto ainda está ativo =)
Página do ProjetoInspirado nas seguintes fontes:
WikipediaUm post no Habr "GPS" interno "com uma precisão de + -2cm"