A transferência de estilo é o processo de conversão do estilo da fonte para o estilo da imagem selecionada e depende do tipo de rede Convolution (CNN), enquanto treinada anteriormente, depende muito da escolha dessa rede treinada. Felizmente, existem essas redes e há muito por onde escolher, mas o VGG-16 será usado aqui.
Primeiro você precisa conectar as bibliotecas necessárias
Código de declaração da bibliotecaimport time import torch from torch.autograd import Variable import torch.nn as nn import torch.nn.functional as F from torch import optim import torchvision from torchvision import transforms from io import BytesIO from PIL import Image from collections import OrderedDict from google.colab import files
Então você precisa declarar a classe da rede pré-treinada VGG-16
Código de classe VGG-16 class VGG16(nn.Module): def __init__(self, pool='max'): super(VGG, self).__init__() self.conv1_1 = nn.Conv2d(3, 64, kernel_size=3, padding=1) self.conv1_2 = nn.Conv2d(64, 64, kernel_size=3, padding=1) self.conv2_1 = nn.Conv2d(64, 128, kernel_size=3, padding=1) self.conv2_2 = nn.Conv2d(128, 128, kernel_size=3, padding=1) self.conv3_1 = nn.Conv2d(128, 256, kernel_size=3, padding=1) self.conv3_2 = nn.Conv2d(256, 256, kernel_size=3, padding=1) self.conv3_3 = nn.Conv2d(256, 256, kernel_size=3, padding=1) self.conv3_4 = nn.Conv2d(256, 256, kernel_size=3, padding=1) self.conv4_1 = nn.Conv2d(256, 512, kernel_size=3, padding=1) self.conv4_2 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv4_3 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv4_4 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv5_1 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv5_2 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv5_3 = nn.Conv2d(512, 512, kernel_size=3, padding=1) self.conv5_4 = nn.Conv2d(512, 512, kernel_size=3, padding=1) if pool == 'max': self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2) self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2) self.pool3 = nn.MaxPool2d(kernel_size=2, stride=2) self.pool4 = nn.MaxPool2d(kernel_size=2, stride=2) self.pool5 = nn.MaxPool2d(kernel_size=2, stride=2) elif pool == 'avg': self.pool1 = nn.AvgPool2d(kernel_size=2, stride=2) self.pool2 = nn.AvgPool2d(kernel_size=2, stride=2) self.pool3 = nn.AvgPool2d(kernel_size=2, stride=2) self.pool4 = nn.AvgPool2d(kernel_size=2, stride=2) self.pool5 = nn.AvgPool2d(kernel_size=2, stride=2) def forward(self, x, layers): out = {} out['relu1_1'] = F.relu(self.conv1_1(x)) out['relu1_2'] = F.relu(self.conv1_2(out['relu1_1'])) out['pool1'] = self.pool1(out['relu1_2']) out['relu2_1'] = F.relu(self.conv2_1(out['pool1'])) out['relu2_2'] = F.relu(self.conv2_2(out['relu2_1'])) out['pool2'] = self.pool2(out['relu2_2']) out['relu3_1'] = F.relu(self.conv3_1(out['pool2'])) out['relu3_2'] = F.relu(self.conv3_2(out['relu3_1'])) out['relu3_3'] = F.relu(self.conv3_3(out['relu3_2'])) out['relu3_4'] = F.relu(self.conv3_4(out['relu3_3'])) out['pool3'] = self.pool3(out['relu3_4']) out['relu4_1'] = F.relu(self.conv4_1(out['pool3'])) out['relu4_2'] = F.relu(self.conv4_2(out['relu4_1'])) out['relu4_3'] = F.relu(self.conv4_3(out['relu4_2'])) out['relu4_4'] = F.relu(self.conv4_4(out['relu4_3'])) out['pool4'] = self.pool4(out['relu4_4']) out['relu5_1'] = F.relu(self.conv5_1(out['pool4'])) out['relu5_2'] = F.relu(self.conv5_2(out['relu5_1'])) out['relu5_3'] = F.relu(self.conv5_3(out['relu5_2'])) out['relu5_4'] = F.relu(self.conv5_4(out['relu5_3'])) out['pool5'] = self.pool5(out['relu5_4']) return [out[key] for key in layers]
Em seguida, é necessário baixar e carregar os pesos VGG-16, depois de transferidos para a placa de vídeo, se possível
vgg = VGG16() vgg.load_state_dict(torch.load('vgg_conv.pth')) for param in vgg.parameters(): param.requires_grad = False if torch.cuda.is_available(): vgg.cuda()
Onde vgg_conv.pth é o nome do arquivo de peso da rede.
Nesse caso, é necessário desativar o treinamento de parâmetros na rede, caso contrário, você pode estragar os pesos carregados que foram treinados por mais de um dia.
Depois, são anunciadas as funções de conversão de imagens de entrada para trazê-las à forma de imagens nas quais a rede VGG-16 foi treinada
Código das funções de conversão de imagem de entrada SIZE_IMAGE = 512 to_mean_tensor = transforms.Compose([transforms.Resize(SIZE_IMAGE), transforms.ToTensor(), transforms.Lambda(lambda x: x[torch.LongTensor([2,1,0])]), transforms.Normalize(mean=[0.40760392, 0.45795686, 0.48501961], std=[1,1,1]), transforms.Lambda(lambda x: x.mul_(255)), ]) to_unmean_tensor = transforms.Compose([transforms.Lambda(lambda x: x.div_(255)), transforms.Normalize(mean=[-0.40760392, -0.45795686, -0.48501961], std=[1,1,1]), transforms.Lambda(lambda x: x[torch.LongTensor([2,1,0])]), ]) to_image = transforms.Compose([transforms.ToPILImage()]) normalize_image = lambda t: to_image(torch.clamp(to_unmean_tensor(t), min=0, max=1))
to_mean_tensor - conversão direta
normalize_image - transformação inversa
A seguir, são anunciadas classes de matriz Gram e funções de perda para a matriz Gram
class GramMatrix(nn.Module): def forward(self, input): b,c,h,w = input.size() F = input.view(b, c, h*w) G = torch.bmm(F, F.transpose(1,2)) G.div_(h*w) return G class GramMSELoss(nn.Module): def forward(self, input, target): out = nn.MSELoss()(GramMatrix()(input), target) return out
A matriz Gram serve para eliminar a referência espacial dos detalhes do estilo.
Depois, vem o processo de carregamento e conversão das imagens de origem e estilo.
imgs = [style_img, content_img] imgs_torch = [to_mean_tensor(img) for img in imgs] if torch.cuda.is_available(): imgs_torch = [Variable(img.unsqueeze(0).cuda()) for img in imgs_torch] else: imgs_torch = [Variable(img.unsqueeze(0)) for img in imgs_torch] style_image, content_image = imgs_torch opt_img = Variable(content_image.data.clone(), requires_grad=True)
Onde style_img e content_img são imagens de entrada que são convertidas em tensores e transferidas para a placa de vídeo, se possível, e opt_img conterá o resultado da transferência de estilo, enquanto a imagem inicial é tirada como inicial.
A seguir, é o processo de seleção de camadas, configuração de pesos e inicialização das funções de perda
Código de Perda e Peso style_layers = ['relu1_1','relu2_1','relu3_1','relu4_1', 'relu5_1'] content_layers = ['relu4_2'] loss_layers = style_layers + content_layers losses = [GramMSELoss()] * len(style_layers) + [nn.MSELoss()] * len(content_layers) if torch.cuda.is_available(): losses = [loss.cuda() for loss in losses] style_weights = [1e3/n**2 for n in [64,128,256,512,512]] content_weights = [1e0] weights = style_weights + content_weights style_targets = [GramMatrix()(A).detach() for A in vgg(style_image, style_layers)] content_targets = [A.detach() for A in vgg(content_image, content_layers)] targets = style_targets + content_targets
E o último passo é o processo de transferência de estilo
epochs = 300 opt = optim.LBFGS([opt_img]) def step_opt(): opt.zero_grad() out_layers = vgg(opt_img, loss_layers) layer_losses = [] for j, out in enumerate(out_layers): layer_losses.append(weights[j] * losses[j](out, targets[j])) loss = sum(layer_losses) loss.backward() return loss for i in range(0, epochs+1): loss = opt.step(step_opt)
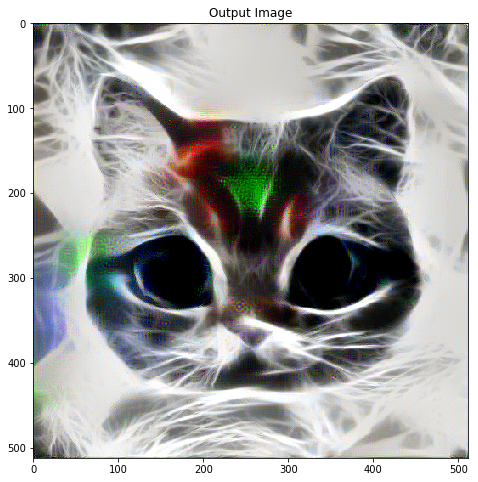
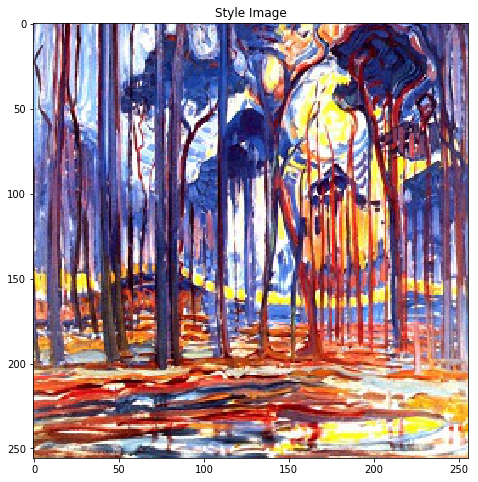
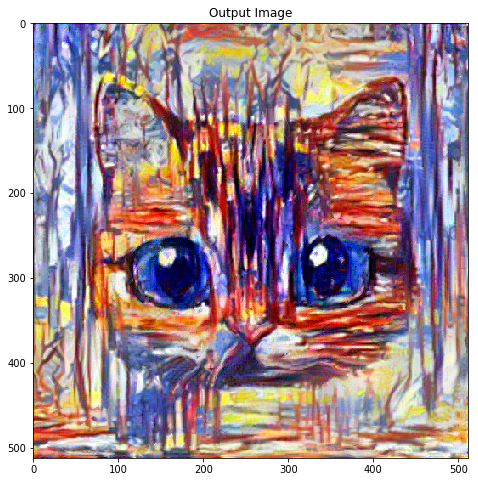
Em conclusão, você pode adicionar alguns exemplos: