 Foto da coleção do autor
Foto da coleção do autor1. História
A memória bolha, ou memória em domínios magnéticos cilíndricos, é uma memória não volátil desenvolvida pela Bell Labs em 1967 por Andrew Bobeck. Estudos mostraram que pequenos domínios magnéticos cilíndricos se formam em filmes finos de ferrita e granada de cristal único, quando um campo magnético suficientemente forte é direcionado perpendicularmente à superfície do filme. Alterando o campo magnético, você pode mover essas bolhas. Tais propriedades tornam as bolhas magnéticas uma ferramenta ideal para construir um armazenamento seqüencial de bits, como um registro de deslocamento, no qual a presença ou ausência de uma bolha em uma determinada posição significa zero ou um valor de bit único. O diâmetro da bolha é de décimos de mícron, um chip pode armazenar milhares de bits de dados. Por exemplo, na primavera de 1977, a Texas Instruments introduziu um chip de 92304 bits no mercado. Essa memória é não volátil, o que faz com que pareça uma fita ou disco magnético, mas como é de estado sólido e não contém partes móveis, possui maior confiabilidade do que uma fita ou disco, não requer manutenção e também possui dimensões e peso muito menores e pode ser usado em dispositivos portáteis.
O inventor original da memória de bolhas, Andrew Bobek, propôs uma versão "unidimensional" da memória, na forma de um fio no qual é enrolada uma fina tira de material ferromagnético. Tal memória foi chamada "twistor" e foi produzida em série, mas logo foi substituída por uma versão "bidimensional".
Você pode se familiarizar com a história da criação da memória de bolhas em [1-3].
2. O princípio da ação
Aqui peço que me perdoe, não sou físico, portanto a apresentação será muito aproximada.
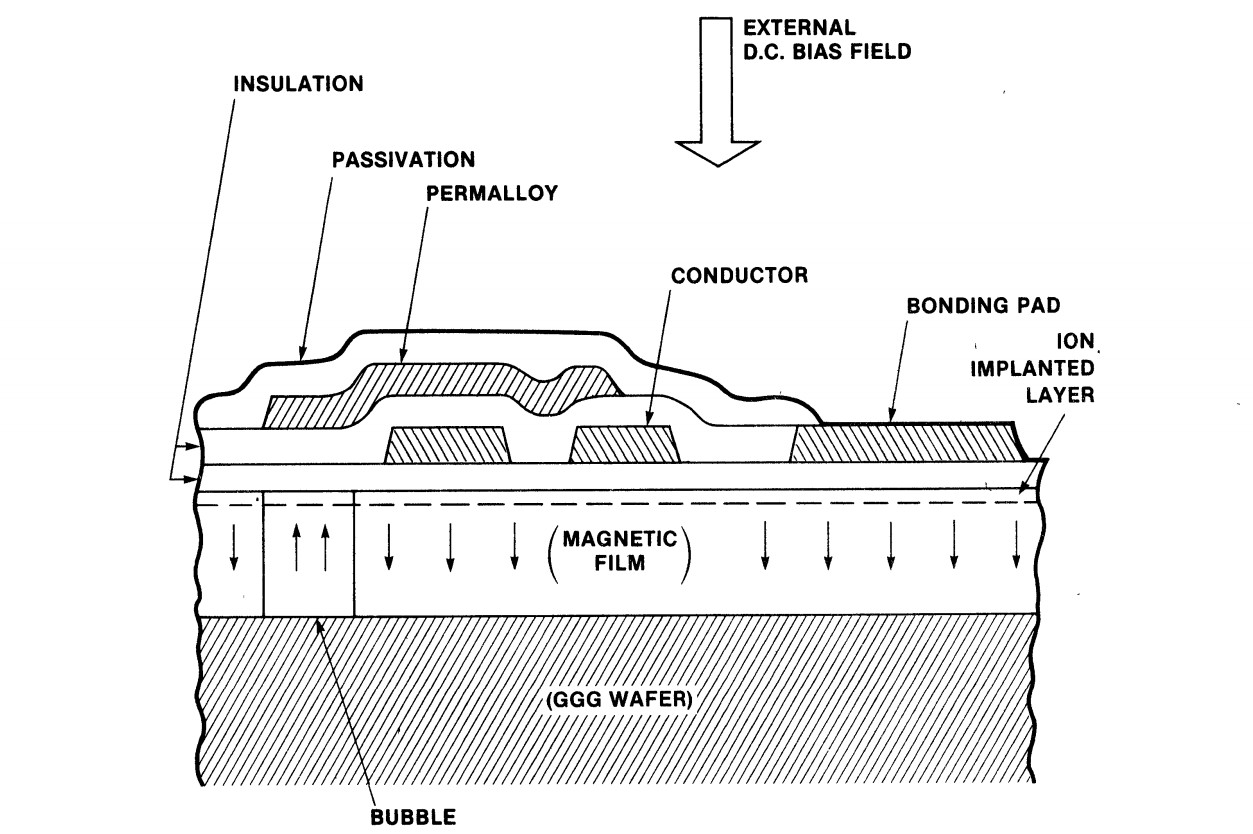
Alguns materiais (por exemplo, granada de gadolínio-gálio) têm a propriedade de serem magnetizados em apenas uma direção, e se um campo magnético constante for aplicado ao longo desse eixo, as regiões magnetizadas formarão algo como bolhas, como mostrado na figura abaixo. Cada bolha tem apenas alguns mícrons de diâmetro.
Suponha que tenhamos um filme cristalino fino, da ordem de 0,001 polegada, de um material desse tipo depositado em um substrato não magnético, por exemplo, vidro.
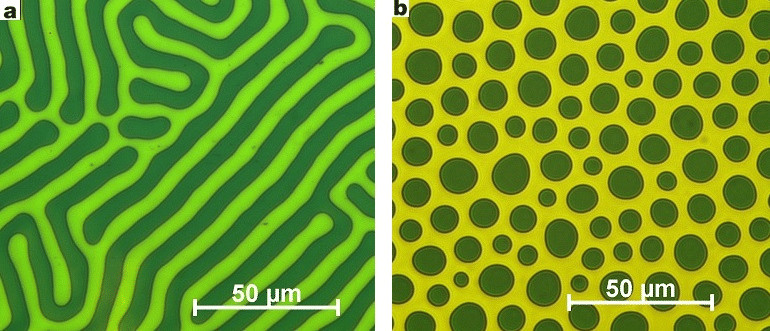 É tudo sobre as bolhas mágicas. Imagem à esquerda - não há campo magnético, imagem à direita - o campo magnético é direcionado perpendicularmente à superfície do filme.
É tudo sobre as bolhas mágicas. Imagem à esquerda - não há campo magnético, imagem à direita - o campo magnético é direcionado perpendicularmente à superfície do filme.Se na superfície de um filme desse material for formado um padrão de material magnético, por exemplo, permalloy, uma liga de ferro-níquel, as bolhas serão magnetizadas para os elementos desse padrão. Normalmente usados são padrões em forma de T ou em V.
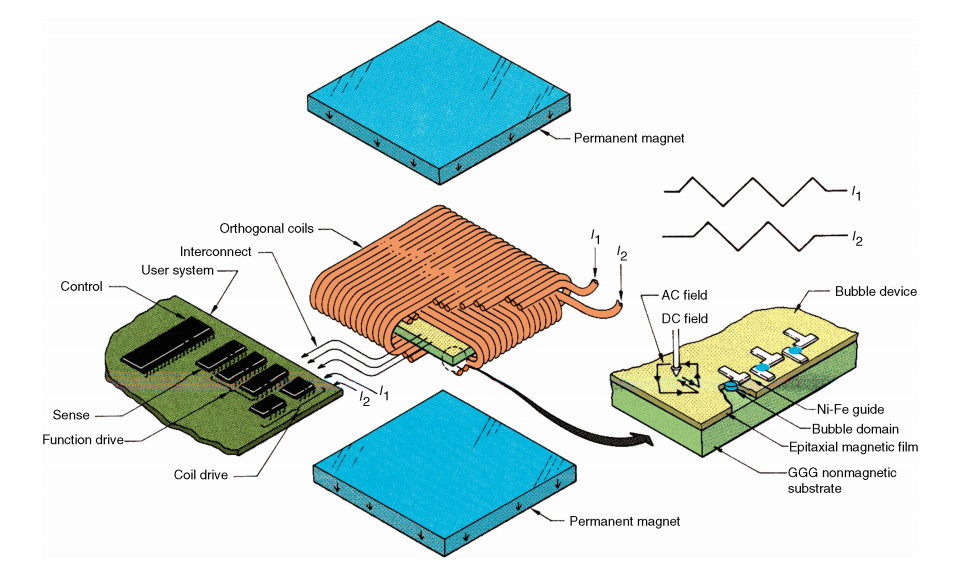
Uma única bolha pode ser formada por um campo magnético de 100-200 Oersted, que é aplicado perpendicularmente ao filme magnético e criado por um ímã permanente, e um campo magnético rotativo formado por duas bobinas nas direções XY permite mover bolhas de domínio de uma “ilha” magnética para outra, como esta mostrado na figura. Depois de uma alteração de quatro vezes na direção do campo magnético, o domínio se move de uma ilha para a outra.
Tudo isso nos permite considerar o dispositivo CMD como um registro de turno. Se formarmos bolhas em uma extremidade do registro e detectá-las na outra, poderemos lançar um certo padrão de bolhas em um círculo e usar o sistema como um dispositivo de armazenamento, lendo e escrevendo bits em determinados momentos.
As vantagens e desvantagens da memória no CMD seguem a partir daqui: a vantagem é a não volatilidade (desde que o campo perpendicular criado pelos ímãs permanentes seja aplicado, as bolhas não desaparecerão e não se moverão de suas posições) e a desvantagem é o longo tempo de acesso, porque Para acessar um bit arbitrário, você precisa rolar o registro de deslocamento inteiro para a posição desejada e, quanto mais tempo, mais ciclos serão necessários.
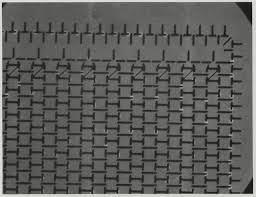 O padrão de elementos magnéticos em uma fita magnética CMD.
O padrão de elementos magnéticos em uma fita magnética CMD.A criação de um domínio magnético é chamada em inglês de "nucleação" e consiste no fato de que uma corrente de várias centenas de miliamperes é aplicada ao enrolamento por um tempo de cerca de 100 ns, e um campo magnético é criado perpendicular ao filme e oposto ao campo do ímã permanente. Isso cria uma "bolha" magnética - um domínio magnético cilíndrico no filme. Infelizmente, o processo depende muito da temperatura, a operação de gravação poderá falhar se uma bolha não se formar ou se formarem várias bolhas.
Várias técnicas são usadas para ler dados do filme.
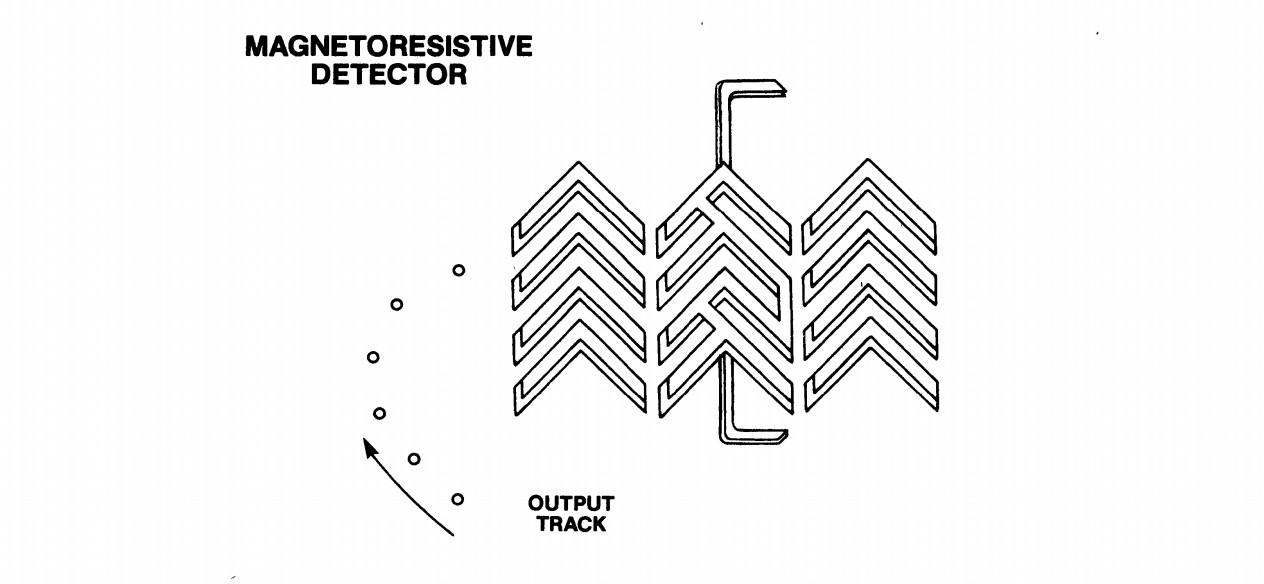
Um método de leitura não destrutivo é detectar um campo magnético fraco de um domínio cilíndrico usando um sensor magnetoresistivo.
A segunda maneira é a leitura destrutiva. A bolha é desviada para uma faixa especial de geração / detecção na qual a bolha é destruída pela magnetização do material na direção direta. Se o material foi magnetizado na direção oposta, ou seja, uma bolha estava presente, isso causará uma corrente maior na bobina e isso é detectado pelo circuito eletrônico. Depois disso, a bolha deve ser regenerada em uma faixa de gravação especial.
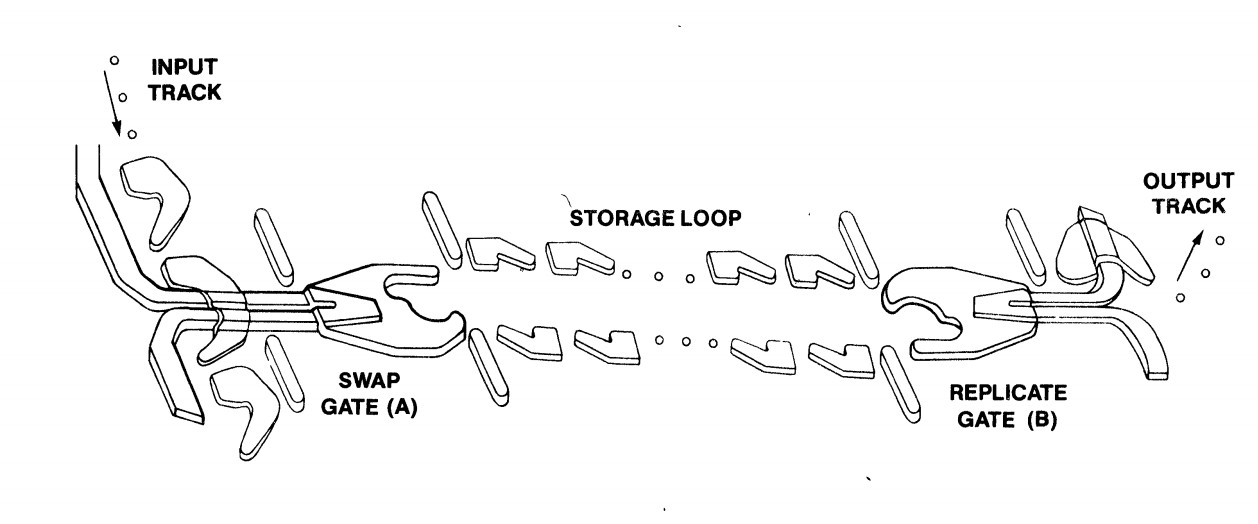
No entanto, se a memória estiver organizada como uma única matriz contínua, ela terá duas grandes desvantagens. Em primeiro lugar, o tempo de acesso será muito longo. Em segundo lugar, o único defeito na cadeia levará à completa inoperabilidade de todo o dispositivo. Portanto, eles criam uma memória organizada na forma de uma faixa principal e muitas faixas subordinadas, conforme mostrado na figura.
 Memória bolha com uma faixa contínua
Memória bolha com uma faixa contínua Memória bolha com faixas master / slave
Memória bolha com faixas master / slaveEssa configuração de memória permite não apenas reduzir significativamente o tempo de acesso, mas também permite o lançamento de dispositivos de memória contendo várias faixas com defeito. O controlador de memória deve levá-los em consideração e ignorá-los durante as operações de leitura / gravação.
A figura abaixo mostra uma seção do "chip" da memória bolha.
Você também pode ler sobre o princípio de ação da memória de bolhas em [4, 5].
3. Intel 7110
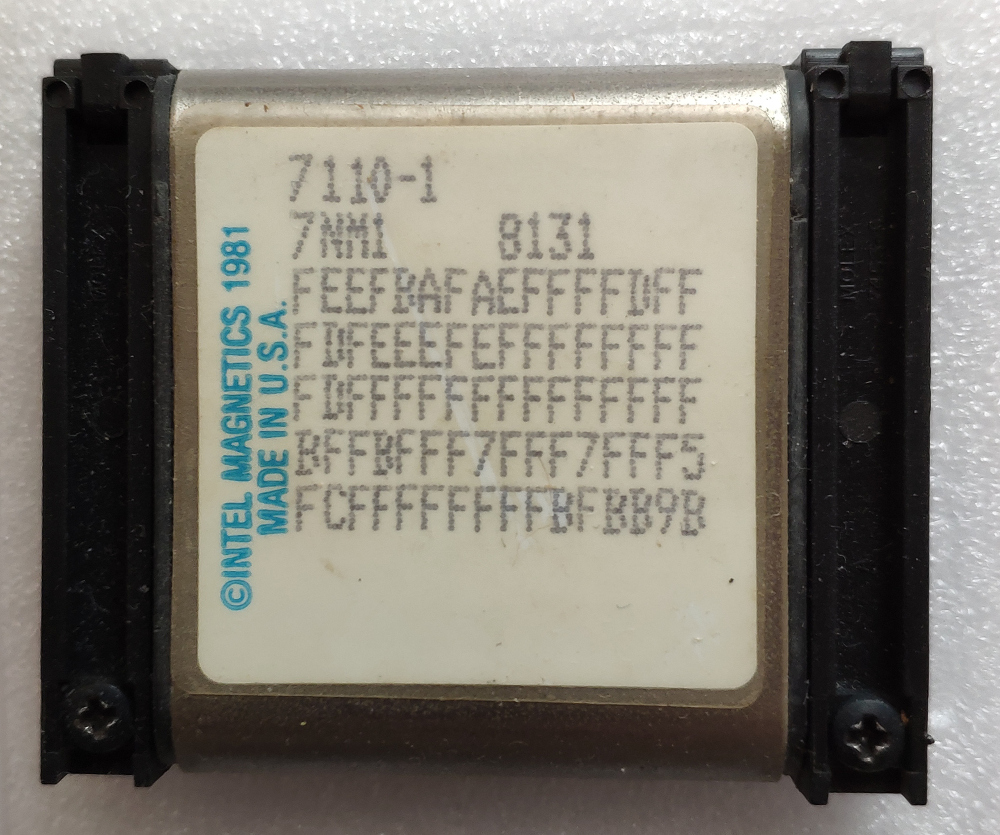
Intel 7110 - módulo de memória bolha, MBM (memória bolha magnética) com capacidade de 1 MB (1048576 bits). É ele quem é retratado no KDPV. 1 megabit é uma capacidade para armazenar dados do usuário, levando em consideração faixas redundantes, a capacidade total é de 1310720 bits. O dispositivo contém 320 loops com capacidade de 4096 bits cada, mas apenas 256 deles são usados para dados do usuário; o restante é uma reserva para substituir faixas "batidas" e para armazenar código de correção de erros redundante. O dispositivo possui a arquitetura das "trilhas principais subordinadas à faixa" (loop principal da faixa menor). Informações sobre faixas ativas estão contidas em uma faixa de inicialização separada (loop de autoinicialização). No KDPV, você pode ver o código hexadecimal impresso diretamente no módulo. Este é um mapa de trilhas “quebradas”, 80 dígitos hexadecimais representam 320 trilhas de dados, as ativas são representadas por um único bit, as inativas são representadas por zero.
Você pode ler a documentação original do módulo em [7].
O dispositivo possui uma caixa com um arranjo de terminais de duas linhas e é montado sem solda (no soquete).
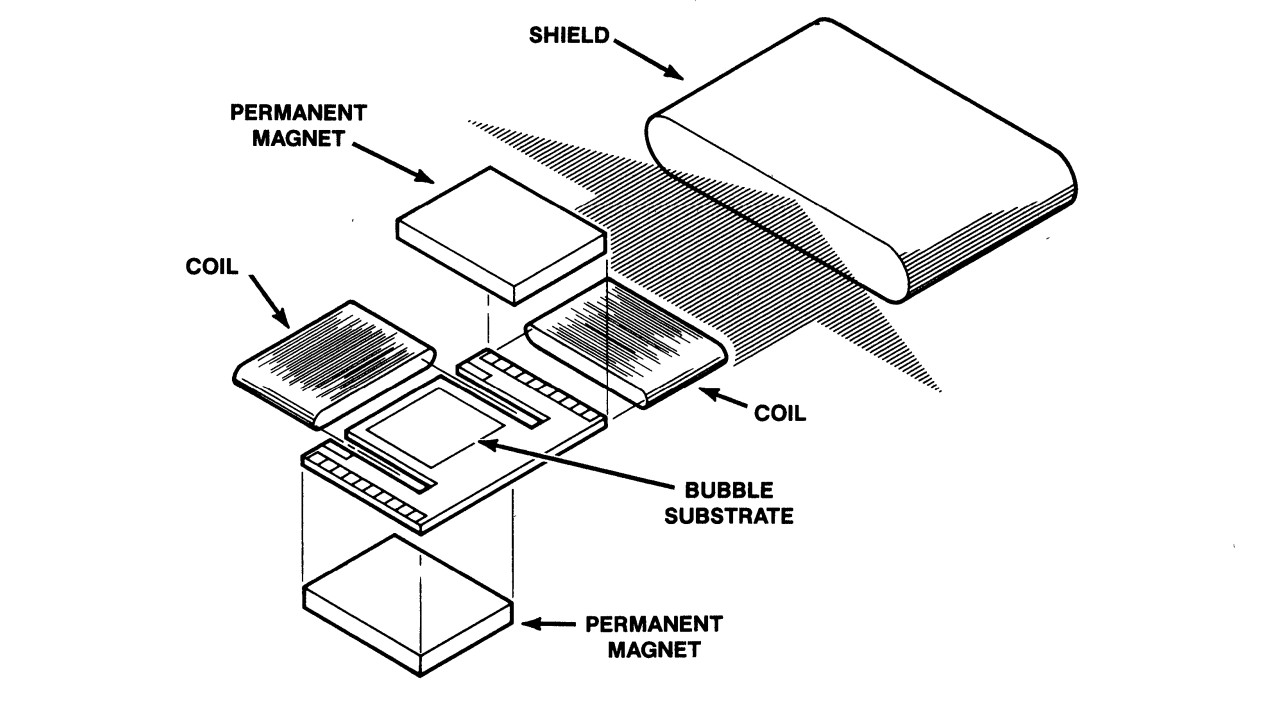
A estrutura do módulo é mostrada na figura:
A matriz de memória é dividida em duas "meias seções" (meias seções), cada uma das quais é dividida em dois "quartos" (quads), cada trimestre tem 80 faixas subordinadas. O módulo contém uma placa com material magnético localizado dentro de dois enrolamentos ortogonais que criam um campo magnético rotativo. Para fazer isso, os sinais de corrente de forma triangular são fornecidos aos enrolamentos, deslocados 90 graus entre si. A montagem da placa e dos enrolamentos é colocada entre os ímãs permanentes e colocada em uma tela magnética, que fecha o fluxo magnético gerado pelos ímãs permanentes e protege o dispositivo dos campos magnéticos externos. A placa é colocada em um ângulo de 2,5 graus, o que cria um pequeno campo de polarização direcionado ao longo da inclinação. Este campo é insignificante em comparação com o campo das bobinas e não interfere no movimento das bolhas durante a operação do dispositivo, mas as desloca para posições fixas em relação aos elementos permalloy quando o dispositivo é desligado. O forte componente perpendicular dos ímãs permanentes suporta a existência de domínios magnéticos de bolhas.
O módulo contém os seguintes nós:
- Memorizando faixas. Diretamente aquelas faixas de elementos permalloy que retêm e direcionam as bolhas.
- Gerador de replicação. Serve para replicação da bolha, que está constantemente presente no site de geração.
- Trilha de entrada e troca de nós. As bolhas geradas se movem ao longo da trilha de entrada. As bolhas movem-se para uma das 80 faixas subordinadas.
- Faixa de saída e nó de replicação. As bolhas são subtraídas das trilhas de dados sem quebrá-las. A bolha é dividida em duas partes e uma delas é enviada para a faixa de saída.
- Detector Bolhas da trilha de saída caem no detector magnetoresistivo.
- Faixa de inicialização. A trilha de inicialização contém informações sobre trilhas de dados ativas e inativas.
Abaixo, consideraremos esses nós com mais detalhes. Você também pode ler a descrição desses nós em [6].
Geração de bolhas
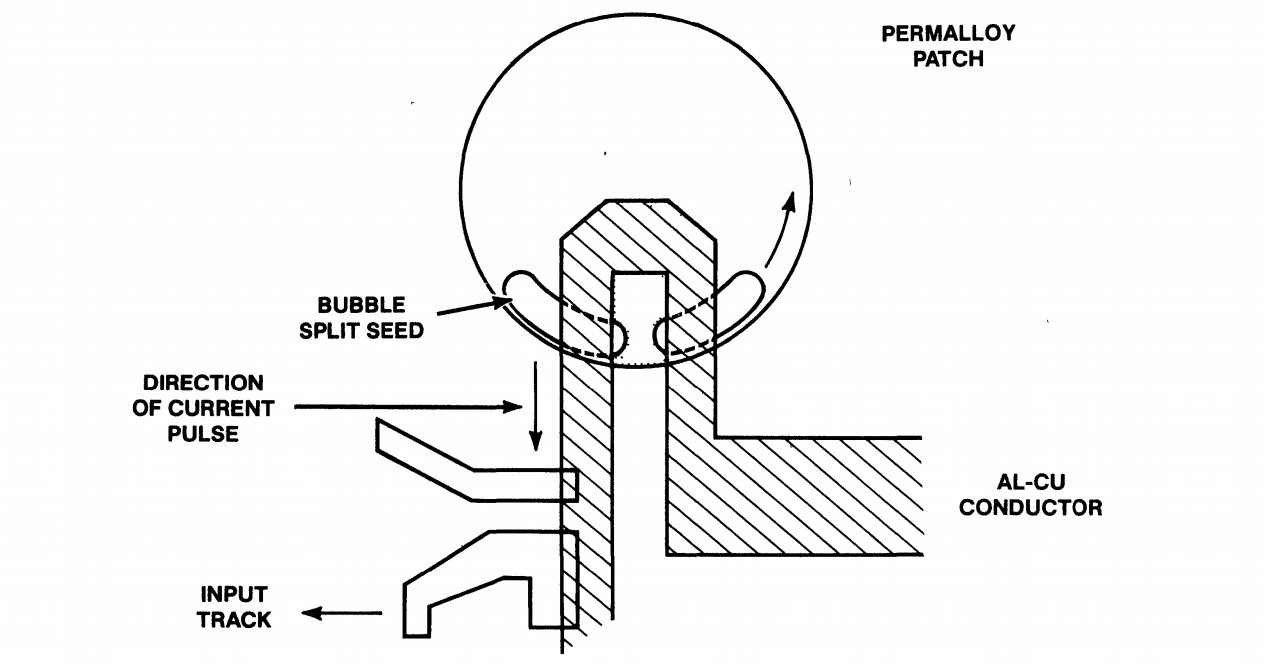
Para gerar uma bolha, no início da faixa de entrada existe um condutor curvo na forma de um pequeno loop. Um pulso de corrente é aplicado a ele, o que cria um campo magnético mais forte em uma região muito pequena do que o campo dos ímãs permanentes. O pulso cria uma bolha neste local, que permanece constante, sustentada por um campo magnético constante, e circula ao longo do elemento permalloy sob a ação de um campo magnético rotativo. Se precisarmos gravar uma unidade na memória, damos um pulso curto ao circuito condutor e, como resultado, duas bolhas nascem (indicadas na figura como semente dividida por bolhas). Uma das bolhas corre por um campo rotativo ao longo da pista de permalloy, a segunda permanece no lugar e rapidamente adquire seu tamanho original. Em seguida, ele se move para uma das faixas subordinadas e muda de lugar com uma bolha que circula nela. Ele, por sua vez, chega ao final da faixa de entrada e desaparece.
Troca de bolhas
A troca de bolhas ocorre quando um pulso de corrente retangular é aplicado ao condutor correspondente. Não há separação da bolha em duas partes.
Lendo dados
Os dados são enviados para a trilha de saída replicando-os e continuam a circular na trilha após a leitura. Assim, o método de leitura não destrutivo é implementado neste dispositivo. Para a replicação, a bolha é direcionada sob o elemento oblongo de permalloy, sob o qual se estende. Também existe um condutor em forma de loop na parte superior; se um pulso de corrente for aplicado ao loop, a bolha será dividida em duas partes. O pulso de corrente consiste em uma seção curta com uma grande força de corrente para dividir a bolha em duas partes, e uma seção mais longa com uma menor força de corrente, a fim de direcionar a bolha para a faixa de saída.
No final da pista de saída, há um detector de bolhas, uma ponte magnetorresistiva feita de elementos permalloy que formam uma longa cadeia. Quando uma bolha magnética cai sob um elemento permalloy, sua resistência muda e uma diferença potencial de vários milivolts aparece na saída da ponte. O formato dos elementos permalloy é selecionado para que a bolha se mova ao longo deles, no final ela cai em um pneu "protetor" especial e desaparece.
Redundância
O dispositivo contém 320 faixas, cada uma com 4096 bits. Destes, 272 estão ativos, 48 são sobressalentes, inativos.
Loop de inicialização
O dispositivo contém 320 faixas de dados, das quais 256 destinam-se ao armazenamento de dados do usuário, o restante pode estar com defeito ou servir como reposição para substituir as que estão com defeito. Uma faixa adicional contém informações sobre o uso de faixas de dados, 12 bits por faixa. Quando a energia é fornecida ao sistema, ela deve ser inicializada. Durante o processo de inicialização, o controlador deve ler a trilha de inicialização e gravar suas informações no registro especial do chip de formatação / sensor de corrente. Em seguida, o controlador usará apenas faixas ativas e as inativas serão ignoradas e elas não serão gravadas.
Data Warehouse - Estrutura
Do ponto de vista do usuário, os dados são armazenados em 2048 páginas de 512 bits cada. 256 bytes de dados, 14 bits do código de correção de erros e 2 bits não utilizados são armazenados em cada metade do dispositivo.
Correção de erro
Os erros podem ser detectados e corrigidos usando um chip sensor atual que contém um decodificador de código de 14 bits que corrige um único erro de rajada em cada bloco de 270 bits (incluindo o próprio código). O código é anexado ao final de cada bloco de 256 bits. O código de correção pode ser usado ou não, a pedido do usuário, a verificação do código pode ser ativada ou desativada no controlador. Se o código não for usado, todos os 270 bits podem ser usados para dados do usuário.
Tempo de acesso
O campo magnético gira a uma frequência de 50 kHz. O tempo médio de acesso ao primeiro bit da primeira página é de 41 ms, que é metade do tempo necessário para concluir o ciclo na pista mais o tempo necessário para sair da pista.
320 faixas ativas e sobressalentes são divididas em quatro partes com 80 faixas cada. Essa organização reduz o tempo de acesso. Os quartos são endereçados em pares: cada par de quartos contém bits pares e ímpares da palavra, respectivamente. O dispositivo contém quatro faixas de entrada com quatro bolhas iniciais e quatro faixas de saída. As faixas de saída usam dois detectores; elas são organizadas de forma que duas bolhas de duas faixas ao mesmo tempo nunca caiam em um detector. Assim, quatro fluxos de bolhas são multiplexados e convertidos em fluxos de dois bits e armazenados nos registros atuais do chip do sensor. Lá, o conteúdo dos registradores é novamente multiplexado e, através da interface serial, entra no controlador.
Na segunda parte do artigo, examinaremos mais detalhadamente os circuitos do controlador de memória bolha.
4. Referências
O autor encontrou nos cantos mais sombrios da rede e salvou para você uma riqueza de informações técnicas úteis sobre memória no CMD, sua história e outros aspectos relacionados:
1.
https://old.computerra.ru/vision/621983/ - Duas memórias do engenheiro Bobek
2.
https://old.computerra.ru/vision/622225/ - Duas memórias do engenheiro Bobek (parte 2)
3.
http://www.wikiwand.com/en/Bubble_memory - Memória de bolha
4.https: //cloud.mail.ru/public/3qNi/33LMQg8Fn Adaptação da memória da bolha magnética em um ambiente de microcomputador padrão
5.
https://cloud.mail.ru/public/4YgN/ujdGWtAXf - Texas Instruments TIB 0203 Bubble Memory
6.
https://cloud.mail.ru/public/4PRV/5qC4vyjLa - Manual de componentes de memória. Intel 1983.
7.
https://cloud.mail.ru/public/4Mjv/41Xrp4Rii 7110 Memória bolha de 1 megabit