
Faltam pouco mais de dois meses para o lançamento do robô FEDOR na ISS, e o processo de sua transformação em um ciber-cosmonauta está quase completo.
Em
continuação desta publicação .
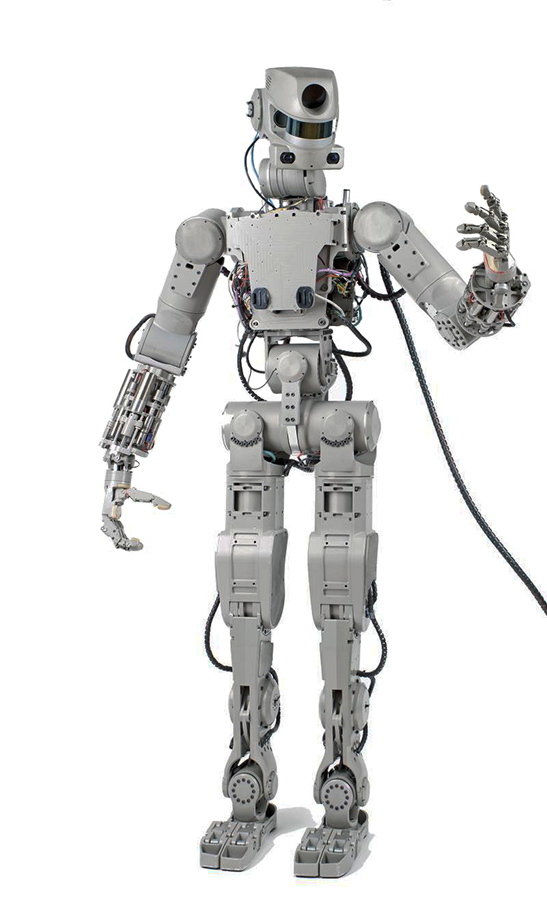
O Robô Fedor ou FEDOR (Pesquisa Final de Objetos de Demonstração Experimental) é um robô antropomórfico desenvolvido pela ONG Android Technique e pela Advanced Research Foundation (FPI), e deve substituir uma pessoa em locais de alto risco.
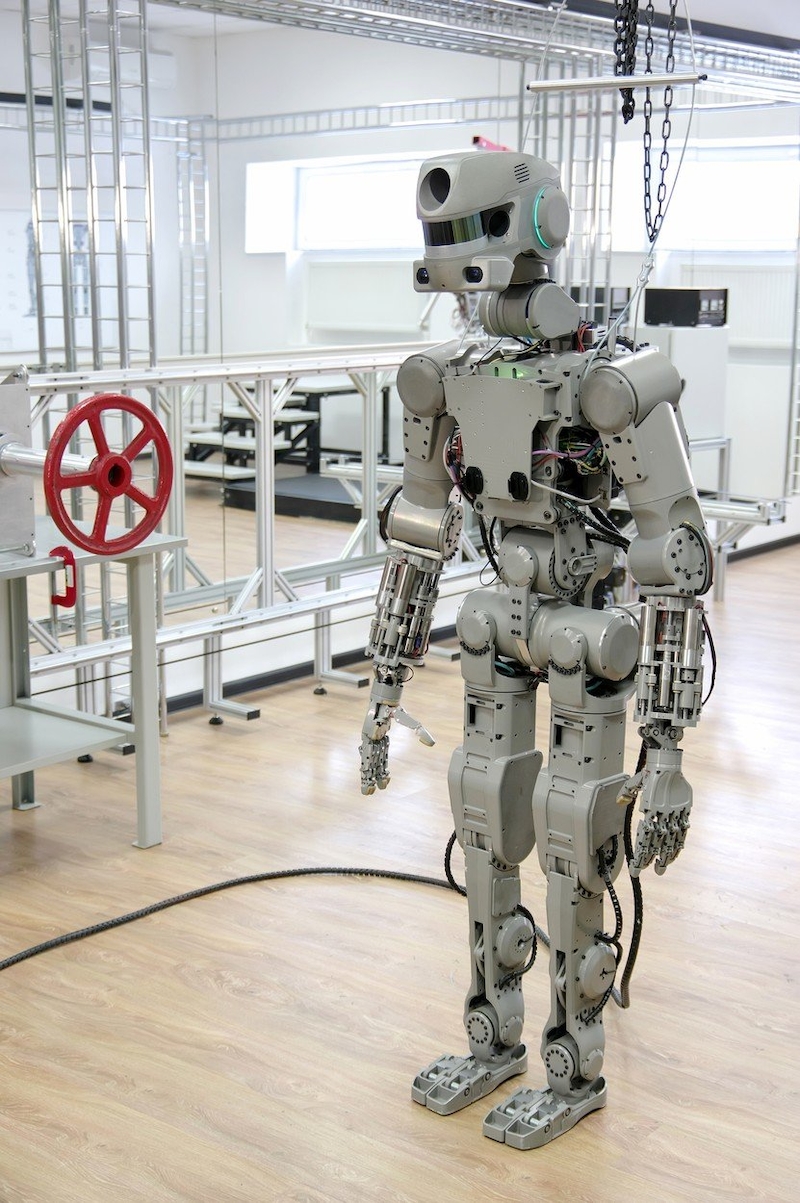 Recursos do robô FEDOR:
Recursos do robô FEDOR:- quase 190 cm de altura;
- peso de até 160 kg (dependendo dos módulos utilizados);
- potência de até 13,5 kW (20 cavalos de potência), sacola tipo bateria externa ou alimentação por cabo;
- consiste em 15 mil partes;
- software: sistema operacional em tempo real desenvolvido em São Petersburgo com base no Linux, software de controle em C ++, C # e Python;
- trabalho offline até 1 hora;
- equipado com duas câmeras, termovisor, microfone, GPS, GLONASS, lasers do tipo rangefinder 15 e um sistema especial para determinar a posição do seu corpo;
- os canais de vídeo do sistema de visão estereoscópica do robô podem trabalhar em conjunto e separadamente (o trabalho conjunto dos canais permite determinar a distância dos objetos e separar - resolva pelo menos duas tarefas funcionais ao mesmo tempo, por exemplo, execute ações de trabalho com duas ferramentas diferentes ao mesmo tempo);
- modos de operação: autônomo, cópia (repete exatamente as ações do operador);
- a mecânica do robô pode reproduzir quase qualquer movimento do corpo humano, e o software, incluindo bibliotecas reabastecidas, permite expandir as habilidades profissionais do robô.
Acontece que em Roscosmos eles planejavam enviar dois robôs FEDOR para a ISS simultaneamente no veículo não tripulado da Soyuz MS em 22 de agosto de 2019.
Esse projeto de teste espacial foi chamado de Cyber Crew. No entanto, a implementação completa deste projeto ainda está em questão.
O problema é que o robô FEDOR, nesse caso, passa de acordo com os cálculos do projeto, não como equipamento científico que pode ser compactamente colocado no compartimento de carga e desembalado e usado a bordo da ISS, mas como uma construção humanóide de pleno direito que precisa ser colocada como astronautas comuns dentro do navio "União MS-14".
Como, em primeiro lugar, os astronautas na ISS não são treinados para montar um dispositivo tão complexo e, de acordo com as instruções da Terra, poderão montá-lo, mas um tempo precioso no espaço será gasto nele.
Em segundo lugar, este primeiro vôo de teste da "tripulação cibernética", em qualquer caso, deve revelar muitos problemas e questões que serão resolvidos a bordo da ISS no modo operacional atual e levados em consideração e analisados para ajustar os projetos científicos de outras missões.
Portanto, imediatamente houve a necessidade de finalizar os elementos estruturais do robô para padrões de espaço.
Depois que a primeira versão do robô FEDOR foi transferida para Roscosmos e o SP Korolev Rocket e Space Corporation Energia (RSC Energia) para estudar a possibilidade de seu uso em programas tripulados, os engenheiros espaciais de Roscosmos tiveram novas tarefas - preparar Robô FEDOR para uma missão espacial em pouco tempo.
O complexo transferido para a Roscosmos inclui elementos: um robô móvel, painéis de controle, ferramentas de integração e o segmento terrestre.
Requisitos de espaço para astronautas:
 A versão espacial do robô FEDOR, ao contrário da civil, sofreu melhorias:
A versão espacial do robô FEDOR, ao contrário da civil, sofreu melhorias:- peso reduzido do robô para 105 kg;
- a cintura escapular foi reduzida em alguns centímetros (para aumentar a folga ao longo do diâmetro da escotilha, que era de seis a sete centímetros, e em testes descobriu-se que era inconveniente removê-la);
- Bateria regular substituída para atender aos requisitos de segurança de vôo espacial;
- novas unidades instaladas;
- O design do robô é testado em um suporte vibratório.
No momento, todos os sistemas do robô adaptado da versão FEDOR-cosmonauta estão operacionais e prontos para o vôo.
Porém, com a conclusão da cadeira regular do robô FEDOR, os engenheiros da RSC Energia tiveram que mexer.

Atualmente, esse problema foi resolvido, o astronauta do FEDOR voará para a ISS na espaçonave Soyuz MS-14, não no alojamento regular do astronauta (descobriu-se que não é suficiente para o robô, mesmo no estado mais adaptado), mas em uma "estrutura de cadeira" feita especialmente de ligas de alumínio, que protegerão os componentes e mecanismos do robô contra influências externas durante o voo.
A primeira versão da "estrutura da cadeira" para o robô ficou assim:
Depois de atracar na ISS, em gravidade zero, os astronautas terão que transferir o robô da espaçonave para a ISS sem adaptações e continuar trabalhando com ela, portanto, na Roscosmos e na RSC Energia, eles tentam facilitar essa tarefa o máximo possível e minimizar o tempo de transporte do robô na fase de descarga, e no futuro, quando testado em condições espaciais.
Em geral, o robô antropomórfico Fedor ainda não embarcou na ISS, mas já definiu muitas tarefas para engenheiros na Terra e astronautas a bordo do complexo orbital.
O lançamento do veículo de lançamento Soyuz-2.1a com o veículo não tripulado Soyuz MS-14 está previsto para 22 de agosto de 2019. A sonda permanecerá na ISS por cerca de uma semana e meia e depois retornará automaticamente à Terra.
A propósito, dentro da estrutura deste voo de teste, está planejado testar a interação do sistema de controle de mísseis digitais e o "enchimento" analógico do sistema de resgate de emergência. Se algo der errado, o robô ainda deve permanecer funcional.
E a ISS agora está rodando a equipe.
O cosmonauta russo Oleg Kononenko, o canadense David Saint-Jacques e a americana Anne McClain retornarão à Terra a partir da ISS. Eles chegaram à estação em dezembro de 2018.
As escotilhas de transição entre a ISS e a Soyuz serão fechadas em 24 de junho às 23h10, horário de Moscou. O desencaixe da estação está programado para 25 de junho de 2019 às 2,25, a inclusão dos motores do navio para descida da órbita é de 4,54.
Em 20 de julho de 2019, está previsto o envio da ISS a bordo da espaçonave Soyuz MS-13, composta por: Alexander Skvortsov, Andrew Morgan e Luca Parmitano.
Assim, Alexei Ovchinin (Rússia), Tyler Nicholas Haig e Kristina Koch (ambos dos EUA) e os três novos astronautas do lançamento em julho encontrarão os robôs FEDOR na ISS.
O astronauta da FEDOR é controlado de três maneiras: via rádio, fibra óptica ou cabo elétrico comum.
O robô pode ser controlado não apenas pelos astronautas a bordo da ISS, mas também pelos técnicos da Terra, conectando-se ao robô por um canal de comunicação externo e usando um traje especial de "controle" com óculos 3D para ver a situação pelos olhos do robô.
É muito interessante que tarefas e experimentos científicos estão planejados e serão feitos na ISS com o robô FEDOR.
Embora em 2016, tenha sido afirmado que o robô FEDOR poderá ir para o espaço sideral, realizar manutenção e outros trabalhos programados.
E depois de concluir testes adicionais sobre a compatibilidade eletromagnética do robô na ISS, o canal de comunicação será testado e o cosmonauta FEDOR executará um conjunto de comandos vindos da Terra.
