
Um cubo de robô autônomo de tamanho pequeno, sem fio, de vôo "Bumble", do projeto Astrobee, começou a passar por testes de vôo a bordo da ISS.
2019 é o ano dos robôs na ISS. O FEDOR ainda não chegou, mas os testes de combate dos robôs do projeto Astrobee já começaram.

Dois robôs já estão na estação - estes são Bumble e Honey, e em julho o terceiro robô, Queen, deve chegar à ISS.

Seus nomes não são tão facilmente associados à miniatura e têm uma disposição de "abelha".
Esses são pequenos robôs autônomos de serviço especialmente projetados para trabalhar com gravidade zero dentro dos módulos da ISS, projetados e criados pela
NASA no centro de pesquisa Ames , que devem ser como abelhas para participar de tarefas espaciais de rotina e libertar a equipe da ISS de ações simples, mas frequentes.
Assim, o projeto Astrobee é um sistema de vôo livre de um complexo de robôs, cujo principal objetivo é testar plataformas automatizadas de pequeno porte em condições de gravidade zero com o recebimento e análise de dados em condições reais e a possibilidade de atualizar e melhorar o software e as funções dos robôs para executar tarefas atuais e novas na ISS.

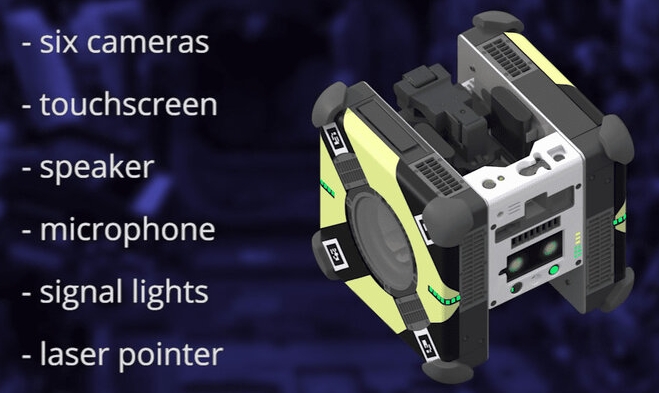
 Características dos robôs do projeto Astrobee:
Características dos robôs do projeto Astrobee:- o tamanho de um robô é 30x30x30 centímetros (1x1x1 pé);
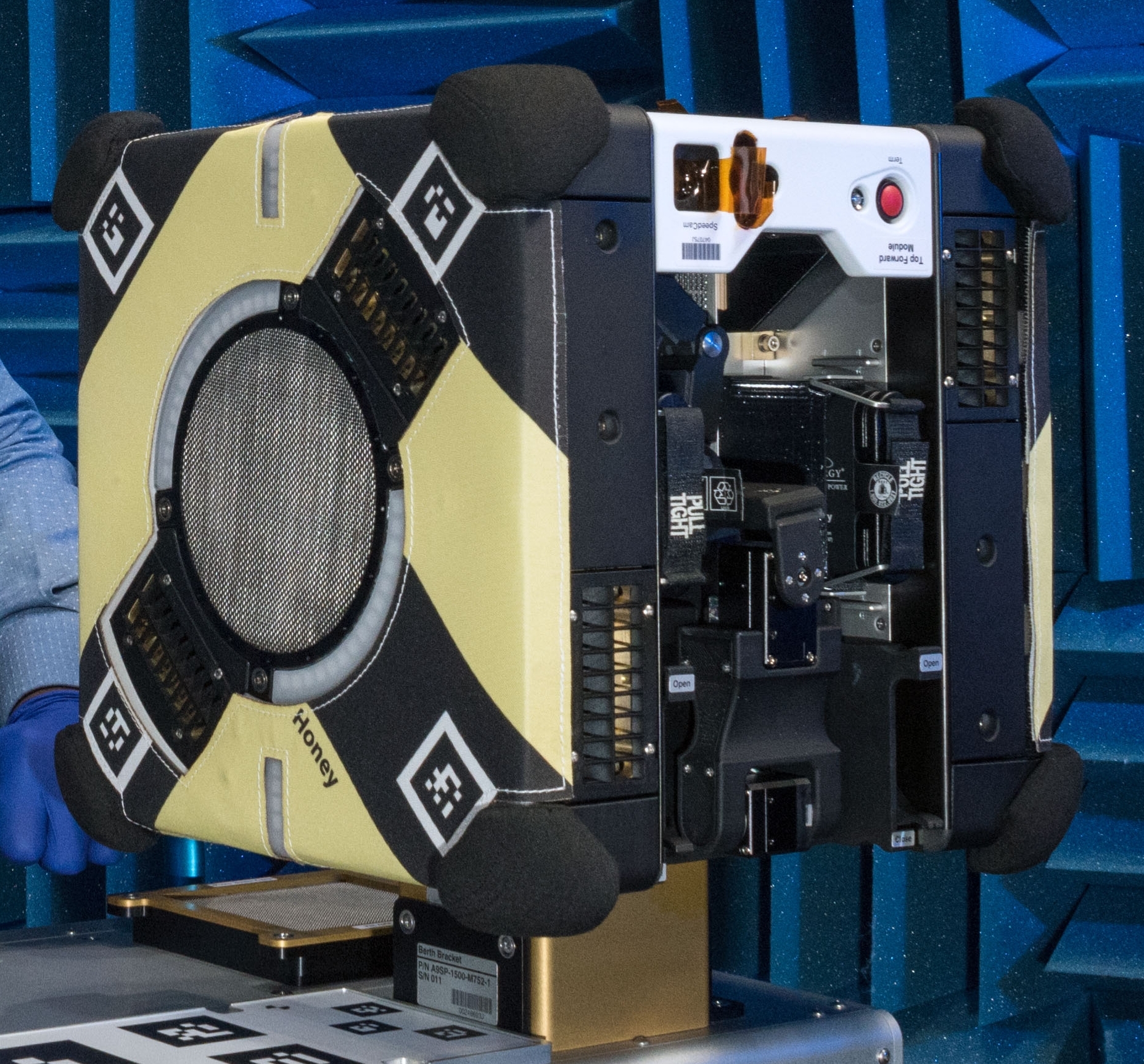
- o corpo do robô é coberto com material macio para minimizar possíveis danos ao atingir um objeto ou elemento na ISS;
- parte das faces do robô é projetada para trabalhar com pequenas cargas, existe até um sistema para capturar e fixar objetos com um manipulador dobrável, para que o robô possa segurar e mover com segurança um objeto de uma extremidade da estação para a outra, com a ajuda dessa captura, o robô pode fixar sua posição quando necessário, pegar em corrimãos ou outros elementos da ISS;

- os robôs possuem uma estação de carregamento externa separada, que serve para carregar as baterias dos robôs e coletar dados de telemetria;

- os robôs só podem se mover dentro da ISS em condições de gravidade zero somente se houver uma atmosfera no módulo de trabalho com o robô; seu sistema reativo usa o ar da estação para se mover;
- cada robô tem seu próprio sistema de controle de computador para o sistema de ventilador de bordo, que permite capturar e descarregar ar através de 12 bicos na direção oposta ao vetor de movimento pretendido, o que possibilita que o robô se mova em qualquer direção e voe livremente pela ISS em gravidade zero;
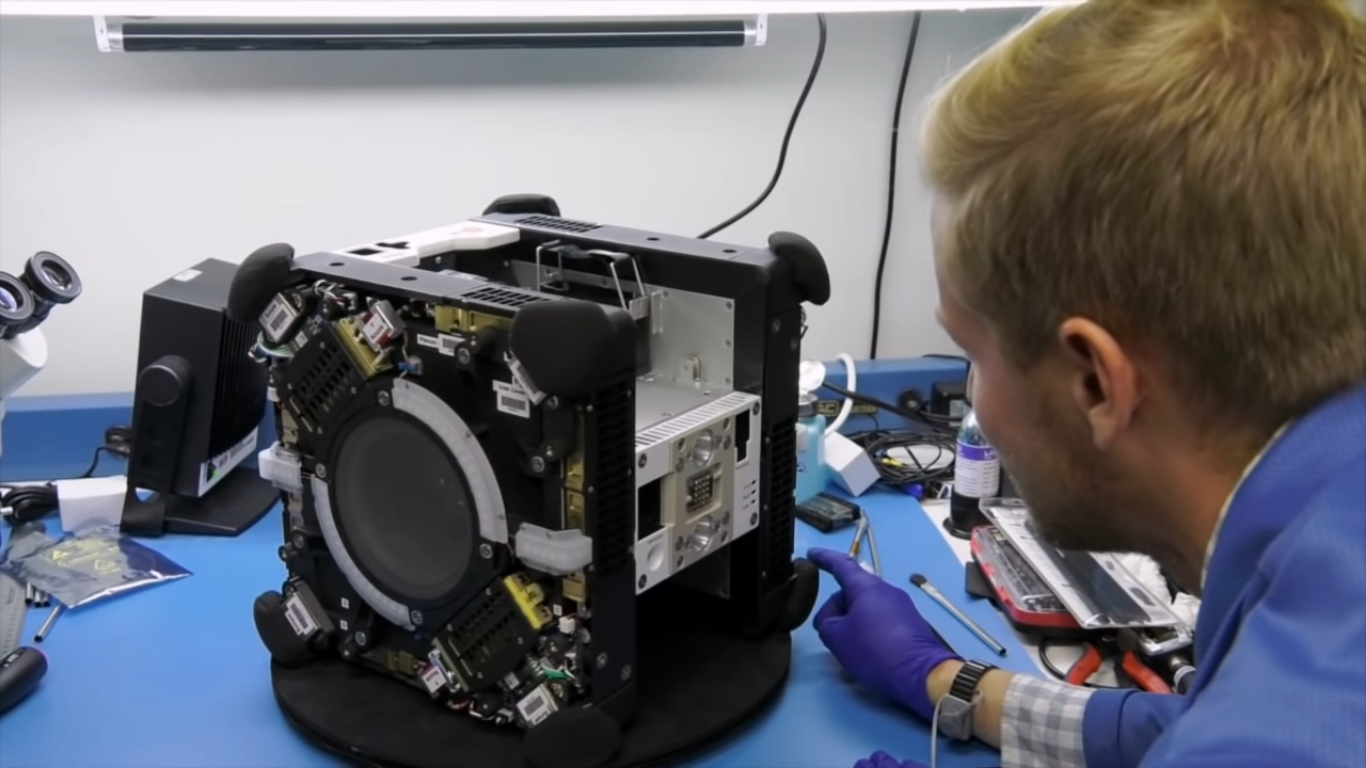
- os ventiladores dos robôs estão localizados atrás de uma parede de proteção especial nas faces de seu cubo;
- o sistema de computador do robô é executado no Linux, e o módulo responsável por trabalhar com objetos e movê-los funciona com base no Android, o que permite expandir rapidamente a funcionalidade do sistema, se necessário;
-
link para o repositório do github com o software do projeto Astrobee.
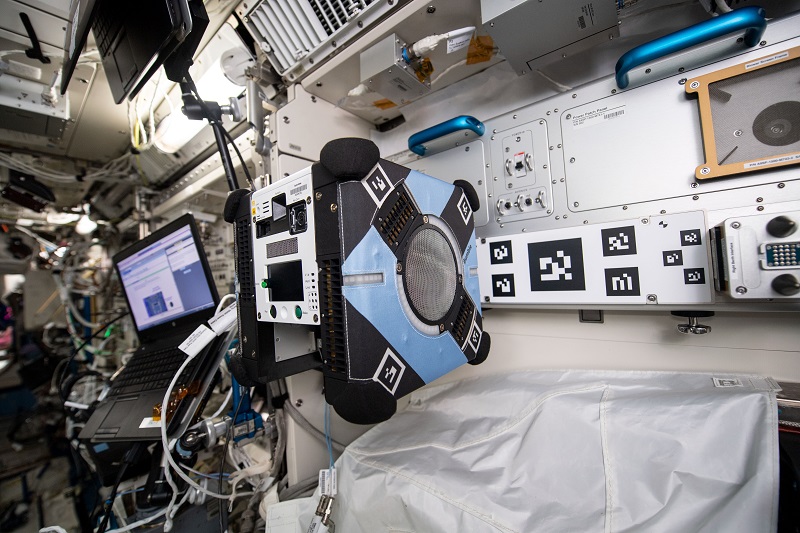
- cada robô tem a bordo: a câmera de navegação principal com um campo de visão de 116 °, várias câmeras HD com foco automático capazes de transmitir informações do ISS para a Terra em tempo real, e sua câmera CamBoard Pico Flexx integrada permite que o robô reconheça objetos e obstáculos a uma distância de quatro metros;
-
cada robô possui um detector óptico para determinar a velocidade e o procedimento de parada de emergência;
- modos de operação dos robôs: autônomos, eles também podem ser controlados remotamente, captados com segurança, carregados, se necessário, desativados.
 Funções dos robôs do projeto Astrobee:
Funções dos robôs do projeto Astrobee:- a principal tarefa dos robôs é ajudar a tripulação na ISS a realizar uma série de tarefas rotineiras, para que a equipe possa se concentrar em tarefas mais importantes (realização de experimentos e vários estudos);
- realizar um inventário, documentar experimentos, verificar os sistemas ISS e mover cargas, objetos e ferramentas pelos corredores estreitos da estação e entre os módulos;

- realizar manutenção dos módulos ISS quando não houver pessoal neles ou em locais onde a tripulação não possa chegar rapidamente;
- monitorar a operação dos sistemas e sensores ISS;
- monitorar a qualidade do ar, analisar o nível de concentração de dióxido de carbono em diferentes locais da ISS sempre que necessário.
 A história do surgimento de robôs do projeto Astrobee na ISS:
A história do surgimento de robôs do projeto Astrobee na ISS:- A estação de carregamento foi entregue a bordo do ISS em 17 de novembro de 2018 e instalada em 15 de fevereiro de 2019;


O disjuntor ABB é usado:

- Os robôs Bumble e Honey foram lançados da Terra para a ISS em 17 de abril de 2019;

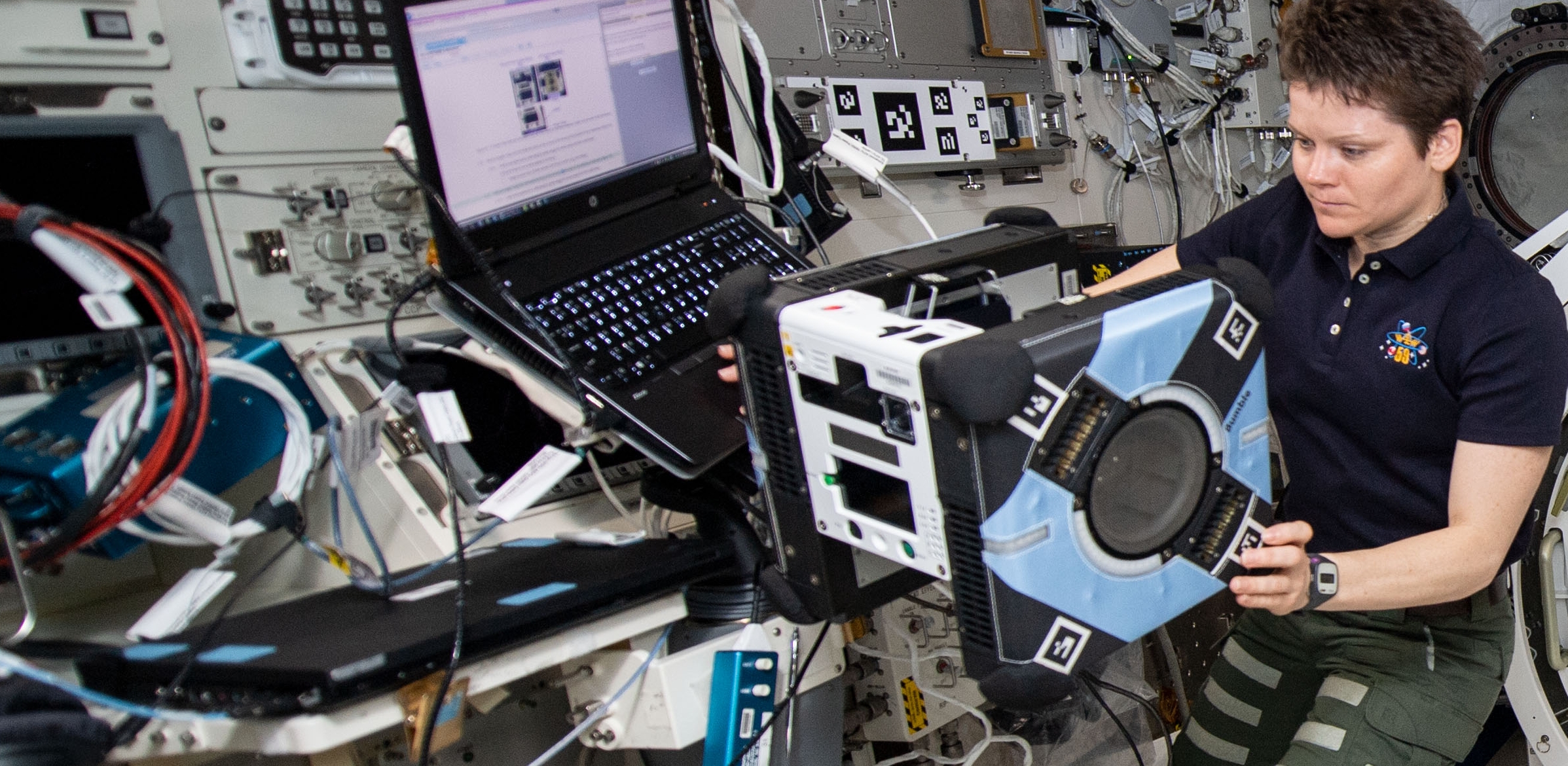
- Em 30 de abril de 2019, Ann McClain (astronauta da ISS) desempacotou a caixa do robô Bumble e, com o apoio da equipe de desenvolvimento Astrobee da NASA, localizada no Ames Research Center, testou todos os sistemas auxiliares do robô - aviônicos, câmeras de vídeo, sistemas propulsores e transferência de dados e carregamento de baterias;





- Em 14 de junho de 2019, começaram os testes de vôo com o robô Bumble;
- julho de 2019 - o terceiro robô Queen deve chegar à ISS.
Sobre o
primeiro vôo do
robô Astrobee
Bumble na ISS:
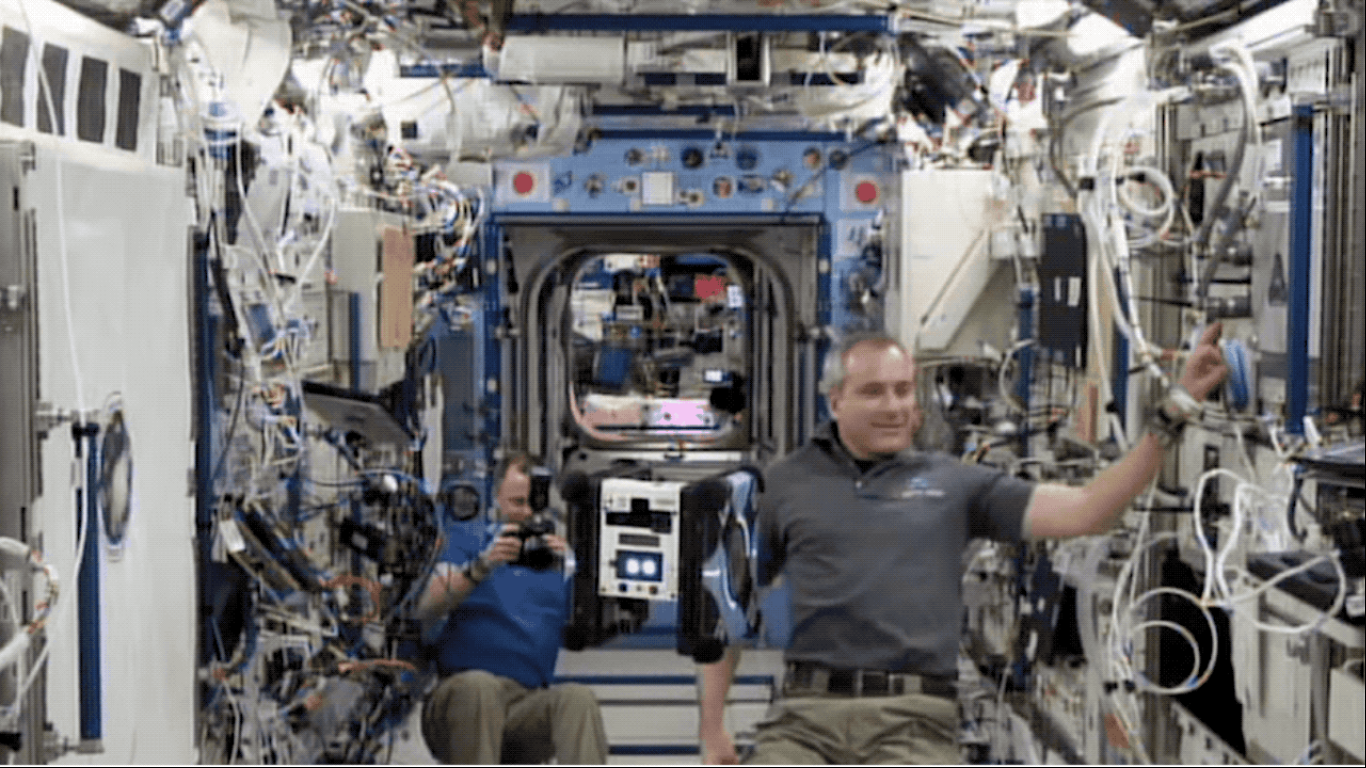
Em 14 de junho de 2019, o robô Bumble se tornou o primeiro robô do projeto Astrobee, que fez o primeiro voo de teste em gravidade zero.
Antes do primeiro voo do robô Bumble, a equipe do projeto Astrobee no Centro de Pesquisa Ames remotamente verificou todos os seus sistemas de bordo, recebeu confirmação da Terra de que o robô pode identificar sua localização e está pronto para navegar dentro da ISS.
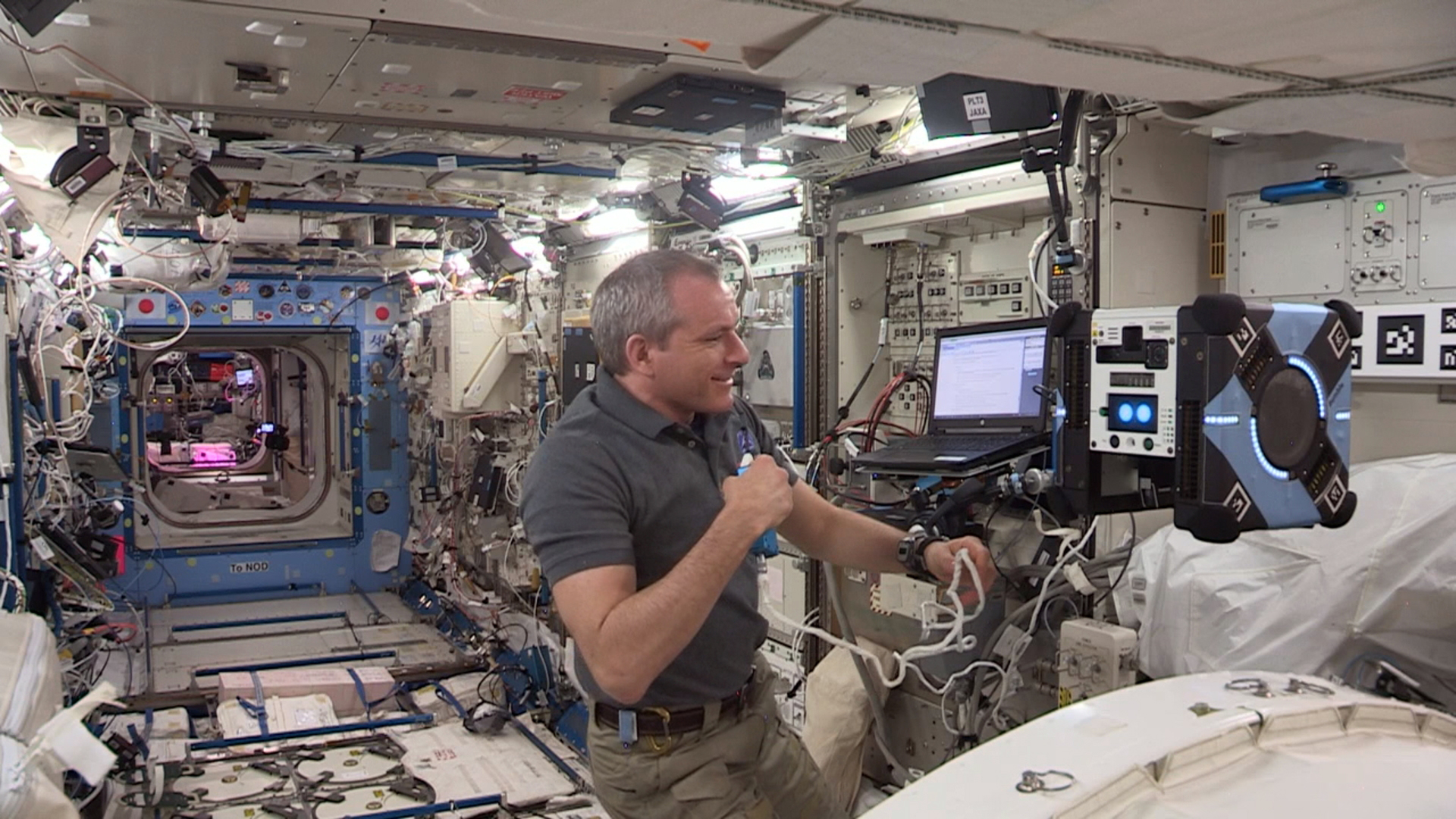
O astronauta da Agência Espacial Canadense David Saint-Jacques prestou assistência prática nos testes de pré-voo, movendo manualmente o robô Bumble para dentro do laboratório de ciências da ISS no módulo Kibo, para permitir que o sistema de navegação do robô seja calibrado no novo ambiente após o fato.
O sistema de navegação do robô Bumble usa câmeras em tempo integral para monitorar e monitorar o espaço externo e, em seguida, compara as imagens recebidas com o mapa interior da ISS previamente carregado no robô.

Os robôs do projeto Astrobe são projetados para se mover em qualquer direção e girar em torno de seus eixos no espaço a bordo da ISS.
Em seguida, começaram os testes na operação dos sistemas de vôo do robô Bumble no modo automático e controlado (remotamente da Terra).
Durante seu primeiro voo de teste do robô Bumble, a operação de seus principais componentes a bordo foi verificada e um complexo de movimentos básicos foi realizado, como “voar 30 centímetros) para a frente” ou “girar 45 graus para a direita”, orientação no espaço ISS e assim por diante.

A NASA planeja continuar a testar as capacidades de vôo do robô Bumble com uma série de manobras cada vez mais complexas para determinar quão bem seus elementos podem funcionar com gravidade zero e quais ajustes precisam ser feitos no software para seu uso posterior.
Com base nos resultados do complexo desses testes de voo, serão criadas configurações básicas para o sistema de propulsão de robôs do projeto Astrobee, com a ajuda da qual está planejado para ajudar os robôs Bumble, Honey e Queen a se prepararem para assumir o papel de novos membros da tripulação da ISS.
O primeiro vôo do robô "Bumble" 
