Um dos mais graves desastres tecnológicos da história da humanidade ocorreu em 26 de abril de 1986. E então quase repetiu em 12 de março de 2011. Como você deve ter adivinhado, estamos falando de acidentes na usina nuclear de Chernobyl na URSS e na usina nuclear de Fukushima-1 no Japão. A série de Chernobyl, filmada pela HBO, mais uma vez alimentou o interesse pela história do acidente de Chernobyl e lembrou o quão difícil era impedir a liberação de radionuclídeos do reator destruído na atmosfera. Separadamente, eles conversaram sobre o uso malsucedido de robôs e o apelo forçado à ajuda de pessoas. O Japão realiza inúmeras experiências com uma variedade de robôs que podem atrasar a necessidade de atrair pessoas para a erradicação.
Os acidentes na usina nuclear de Chernobyl e Fukushima têm causas diferentes e uma crônica diferente de eventos, mas eles têm uma coisa em comum - a vasta área ao redor das estações está infectada, o que torna impossível para eles viverem em segurança por um longo tempo, e não há dúvida de uma limpeza completa das unidades de energia. Nos dois casos, a humanidade não estava pronta para liquidar as consequências - centenas de milhares de pessoas na URSS trabalharam na descontaminação da zona de exclusão e na construção de um sarcófago protetor sobre o reator. No Japão, eles foram para o outro lado.
Referência: padrões de exposição
A frase sobre o fundo de radiação da série de Chernobyl conseguiu se tornar um meme na Internet estrangeira: "3,6 raios-x não são nada bons, mas não terríveis". De fato, vale a pena ter medo desses mesmos 3,6 raios-x por hora, ou isso realmente não é um cenário terrível? Para entender melhor as medidas de Fukushima fornecidas no post abaixo, você deve primeiro entender a escala de doses e seus efeitos no corpo.
O raio X (P), que é bem conhecido pelos russos, é uma unidade obsoleta de medida do fundo de radiação que não está incluída no sistema SI. Agora Sievert (Sv) é usado. Simplificando, 1 Sv é igual a 100 R. Ou seja, 3,6 R / h é 0,036 Sv / h ou 36 mSv / h. Na Rússia, em alguns institutos de pesquisa, você pode ver um painel com o histórico atual, medido em raios-x. Em média, o meio urbano em nosso país flutua no nível de 12-20 μR / h ou 0,12-0,2 μSv / h. Uma pessoa recebe uma dose de cerca de 2,4 mSv por ano do fundo natural de radiação em nosso planeta (dependendo do país e da altitude). Essa radiação vem do espaço, vem do solo, da água, está presente no ar, graças ao gás radônio.
E agora uma pequena mesa com as doses que recebemos ao longo de nossas vidas (a única exposição indicada abaixo é o recebimento da dose apropriada por até 4 dias):


Vamos voltar aos 3,6 R / h mencionados na série. 0,036 Sv / h (36 mSv / h) não é realmente um cenário terrível em caso de acidente, para o desenvolvimento de uma doença de radiação leve é necessário permanecer na zona de perigo por mais de um dia, e o trabalho de reparo por várias horas é bastante seguro e aceitável. E agora lembramos como, um pouco mais tarde, eles disseram na série que o fundo do reator não é 3,6, mas 15.000 raios-x (150 Sv / h). Quatro minutos com esse pano de fundo acarretam a morte inevitável. Após dois minutos, apenas o atendimento médico qualificado mais rápido pode dar uma chance de salvação, e 25 segundos são suficientes para causar doença de radiação.
Toshiba em Fukushima
A parceria entre a Toshiba e a Tokyo Energy Company (TEPCO) começou já na fase de construção da usina nuclear de Fukushima-1. A Toshiba foi responsável pela construção de reatores do tipo BWR para a terceira e quinta unidades de energia, comissionadas em 1976 e 1978, respectivamente. Entre as vantagens dos reatores BWR está a pressão de vapor mais baixa no circuito primário do que, por exemplo, o VVER soviético e temperaturas operacionais mais baixas. As desvantagens incluem a complexidade da fabricação, a necessidade de um gabinete de tamanho muito grande, a complexidade do controle e da radiólise nos elementos combustíveis, o que implica a geração de hidrogênio explosivo.
Se o acidente na usina nuclear de Chernobyl foi causado pela falta de projeto do reator RBMK, que se fez sentir durante as violações durante os testes, dois desastres naturais levaram ao incidente de Fukushima. Um terremoto com magnitude recorde de 9,0 a 9,1 levou ao desligamento dos reatores, e o tsunami subsequente inundou o território de Fukushima-1 e geradores de emergência que abastecem as bombas de resfriamento do reator. Os reatores da estação, que mesmo no caso de uma parada de emergência, não esfriam imediatamente, ficam sem fluxo de água fria, o que faz com que ela ferva, aumente a pressão e a temperatura do vapor no interior, gera hidrogênio devido ao contato do vapor com o zircônio nos elementos combustíveis (reação vapor-zircônio) e sua subsequente explosão . Na primeira, segunda e terceira unidades de energia, o núcleo do reator derreteu e o combustível nuclear vazou. Em Fukushima, os radionuclídeos fluem para o oceano junto com a água de resfriamento; na usina nuclear de Chernobyl durante um incêndio, eles entraram na atmosfera e se espalharam por toda a Europa.
 Crônica do que aconteceu em três unidades de energia. A quarta unidade de energia também foi afetada, mas não havia combustível nuclear em seu reator; portanto, houve apenas um incêndio. Fonte: Roulex_45 / Wikimedia
Crônica do que aconteceu em três unidades de energia. A quarta unidade de energia também foi afetada, mas não havia combustível nuclear em seu reator; portanto, houve apenas um incêndio. Fonte: Roulex_45 / Wikimedia
Para eliminar o acidente de Fukushima, é necessário compilar um mapa de danos, encontrar combustível derretido e seus pontos de vazamento, remover o combustível nuclear usado dos reatores e manter piscinas, desmontar os escombros - ou seja, realizar um trabalho tremendo sob um fundo de radiação igualmente colossal. Agora, esse trabalho no FAES é feito por robôs e carros com controle remoto - enviar pessoas para a zona do acidente é muito perigoso; em alguns locais da estação, o fundo pode matar uma pessoa em apenas alguns minutos.
A Toshiba, juntamente com o Instituto Internacional de Pesquisa para o Desmantelamento de Reatores Nucleares (IRID), está desenvolvendo robôs para tarefas específicas - inspeção das unidades de energia de Fukushima e descontaminação (limpeza) de salas devido à contaminação radioativa. Falaremos sobre alguns dos robôs mais notáveis da Toshiba que deram sua pequena, mas importante contribuição para a causa do acidente.
A propósito, há uma opinião errônea de que a liquidação de Fukushima não levou em conta a valiosa experiência de Chernobyl. Isso é fundamentalmente errado. Imediatamente após o acidente, foi criado um grupo de especialistas nipo-russos no campo da energia nuclear para lidar com as conseqüências do acidente de Fukushima-1, entre os quais Larion Aleksandrovich Lebedev, participante direto da usina nuclear de Chernobyl desde o verão de 1986, membro do Instituto de Física de Engenharia de Moscou, que fez uma enorme contribuição no estudo das condições de radiação e na construção do sarcófago. Após o acidente no Japão, Larion Lebedev aprimorou a tecnologia para a separação de trítio da água radioativa, o que nos permitiu começar a limpar os enormes volumes de água pesada restantes após o resfriamento dos reatores destruídos. Em nome do governo japonês, Larion Alexandrovich recebeu a Ordem do Sol Nascente, concedida por méritos civis e militares.
Batedor de quatro patas
O primeiro robô da Toshiba a entrar no FAES foi o drone de quatro patas sem nome, cujo desenvolvimento começou imediatamente após o acidente. Sua missão, como todos os robôs lançados na usina nos primeiros anos, era reconhecimento de radiação e avaliação de danos dentro de unidades de energia.
Um dosímetro e seis câmeras foram instaladas no chassi para inspecionar as instalações da estação. A eletrônica protegida foi projetada para operar com uma radiação de 100 mSv / h por um ano (com um dia útil de 10 horas) e com um fundo muito maior por curtos períodos. É verdade que apenas uma carga de bateria era suficiente para 2 horas de existência autônoma. O robô se moveu a uma velocidade de cerca de 1 km / h, o que é suficiente ao examinar uma unidade de energia destruída. O gerenciamento foi realizado no ar com redundância em caso de interferência.
Na parte inferior do dispositivo, um pequeno drone de reconhecimento foi acoplado, que pode se soltar de sua transportadora e se arrastar para lugares estreitos onde um robô alto não conseguia passar. Era para ser usado para procurar vazamentos de água de resfriamento sob a tubulação do reator.
Isso não quer dizer que grandes esperanças foram depositadas no robô: mesmo no estágio da demonstração, os jornalistas apontaram a lentidão da máquina - demorou um minuto para subir cada degrau da escada e, ao colocar o pé em uma superfície instável, o robô poderia rolar de lado.
No entanto, o primeiro mecanismo experimental da Toshiba para o FAES ainda conseguiu penetrar no prédio da segunda unidade de energia e realizar um pequeno reconhecimento. A TEPCO publicou um relatório em 11 de dezembro de 2012. O robô tirou fotos de um dos canos, confirmando a ausência de vazamentos. Em março de 2013, ele entrou mais cinco vezes. Mas logo, ao tentar inspecionar ainda mais as instalações, o robô perdeu o equilíbrio nas escadas e caiu de lado. Devido à falta de um mecanismo de rotação, o batedor de quatro patas permaneceu deitado no segundo bloco.
Escorpião Explorer dobrável
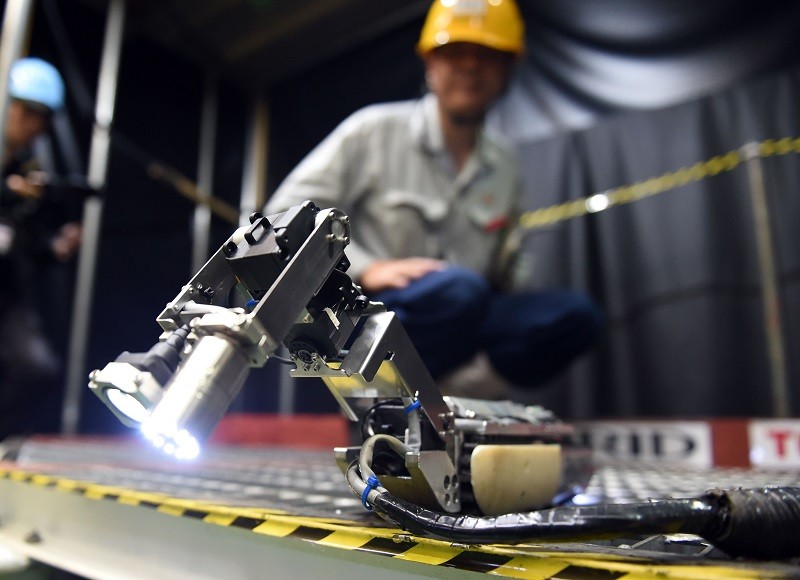
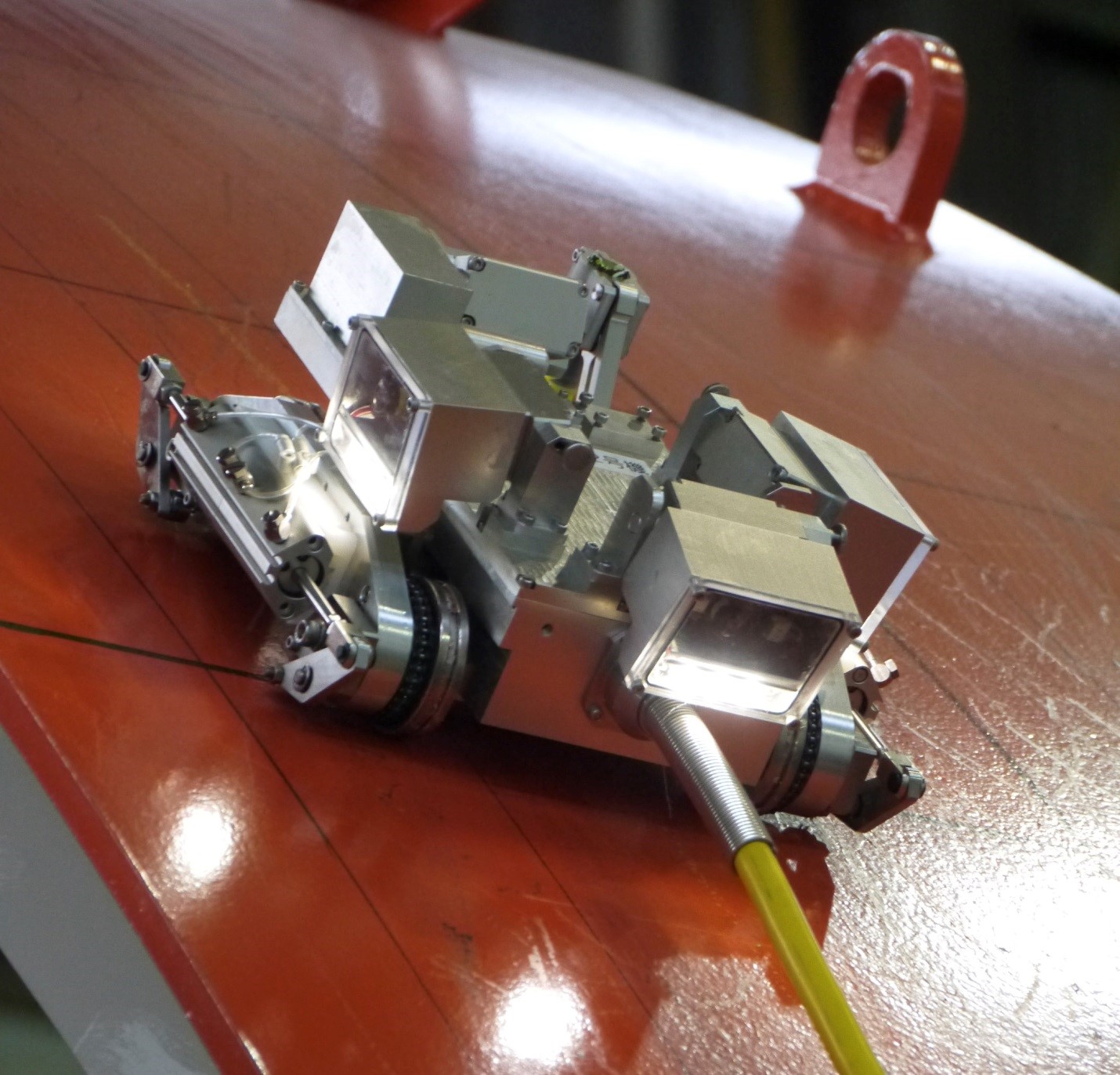
O próximo robô da empresa, que levou em consideração todas as deficiências do modelo anterior, foi o Toshiba Scorpion, assim chamado por sua forma (foto do título). Foi desenvolvido para uma tarefa muito difícil - estudar o fundo do reator e procurar barras de combustível, e essa missão envolve trabalhar com um enorme fundo de radiação. O Scorpion foi poupado das pernas, que foram substituídas por esteiras, e, para ser compacto, o design era dobrável - o carro deveria ser jogado no reator através das passagens para carregar as barras de combustível. No modo de operação, o robô levanta seu manipulador de cauda, movendo-se ao longo de três eixos à maneira de um escorpião, no final do qual uma câmera e os LEDs da luz de fundo são adaptados em vez da picada. Outra câmera é montada na frente e sempre olha para a frente.
O Scorpion é controlado pelo operador via cabo, para que não haja problemas com a transmissão de energia e sinal. Além disso, o robô é retornável e não deve permanecer no reator após a transmissão do testemunho. Derrubar ele não tem medo, a “cauda” com a câmera retorna o robô à sua posição normal.
Por vários anos, Scorpion foi finalizado para finalmente entrar no FAES - com o tempo, ele recebeu um pequeno canhão de água para limpar o caminho, um balde e um cortador para trabalhar com corium. Em fevereiro de 2017, o robô foi ao reator, onde mediu o fundo e gravou um vídeo. O dosímetro mostrou impressionantes 210 Sv / h (21.000 R). Na sala ao lado, onde havia trabalhadores carregando o robô no cano, o fundo era de 6 mSv / h.
ROV: pequeno submarino
 Um pequeno submarino com câmeras de vídeo, com grandes expectativas. Fonte: Toshiba
Um pequeno submarino com câmeras de vídeo, com grandes expectativas. Fonte: Toshiba
Uma ferramenta subaquática controlada remotamente, ou ROV, para abreviar, é o primeiro robô flutuante da Toshiba construído para estudar o reator da terceira unidade de energia, cuja parte inferior está oculta sob uma coluna de água de seis metros. Este pequeno submarino com dimensões de 30 x 13 cm e pesando 2 kg carrega duas câmeras e uma luz de fundo, é controlado por cabo e pode se mover debaixo d'água em qualquer direção com alta precisão. O dispositivo é controlado pelo operador e o sinal e a energia são fornecidos através de um cabo longo. Para impedir que o fio se enrole e se agarre a detritos, a Toshiba desenvolveu um revestimento especial com atrito mínimo, e dois motores potentes foram instalados no próprio ROV, para que o robô pudesse arrastar o cabo com facilidade.
A propósito, o diâmetro do ROV de 14 cm deveu-se a uma entrada estreita no vaso do reator da terceira unidade de energia; portanto, os engenheiros da Toshiba tiveram que trabalhar duro para encaixar a eletrônica, a proteção e os motores em uma caixa tão compacta. No final de um curso intensivo de dois meses para operadores, o Toshiba ROV foi para o FAES. O robô visitou o reator nos dias 19, 21 e 22 de julho de 2017 e inspecionou com sucesso as entranhas destruídas.
SC-ROV magnético
Outro local inacessível no qual a água com radionuclídeos acumulados foram as câmaras de alívio de pressão toroidais localizadas abaixo do reator. Era necessário enviar um robô para procurar vazamentos sob a câmera, mas o assunto foi complicado pelo fato de a contenção ter sido inundada - o robô era obrigado a inspecionar os tubos imersos em água barrenta. Os dispositivos flutuantes não eram adequados para isso, era necessária uma sonda que seria fixada no tubo e capaz de viajar ao longo dele sem deslizar mesmo em um ângulo grande.
Como fixar o robô em um tubo de aço para que ele não role? Com a ajuda de ímãs. O SC-ROV da Toshiba foi projetado especificamente para a câmara de alívio de pressão. É um chassi com rodas feitas de poderosos ímãs de neodímio. Usando quatro câmeras e um marcador, o operador pode se mover ao longo da superfície de um tubo submerso na água e marcar os furos encontrados.
 Durante a demonstração, o SC-ROV segurou ímãs perfeitamente na superfície inclinada. Mas as condições reais eram muito mais difíceis. Fonte: IRID
Durante a demonstração, o SC-ROV segurou ímãs perfeitamente na superfície inclinada. Mas as condições reais eram muito mais difíceis. Fonte: IRID
De acordo com os resultados do SC-ROV em 2014, não foram encontrados vazamentos, mas foram encontrados problemas na operação do dispositivo. Em primeiro lugar, devido à turbidez da água, o alcance da visibilidade não excedeu 30-35 cm, o que atrasou significativamente a pesquisa. Em segundo lugar, devido a alguns defeitos na superfície do tubo, o robô deslizou dele quando inclinado para 120 °.
Câmera de pesquisa Corium
As missões de busca anteriores mostraram uma imagem deprimente - o combustível nuclear no reator da segunda unidade de energia foi além do vaso do reator. As fotografias da grade derretida no fundo da contenção deixaram claro que o combustível já estava em algum lugar no fundo. Mas a contenção a deteve ou o córion afundou no chão? Era necessário enviar um novo robô para o "inferno" do ex-reator para um combustível incrivelmente desbotado.
 A grade derretida dentro da contenção do segundo reator está exatamente acima do acionamento das hastes do sistema de controle e proteção. Fonte: TEPCO
A grade derretida dentro da contenção do segundo reator está exatamente acima do acionamento das hastes do sistema de controle e proteção. Fonte: TEPCO
Os robôs de esteira funcionam apenas em um piso plano, e um submarino precisa de uma espessura de água. A Toshiba apresentou uma câmera de telecontrole montada na extremidade de um tubo telescópico de cinco metros. Independentemente do ângulo de entrada do tubo no confinamento, a câmera assume uma posição estritamente vertical - a unidade principal é mantida por um cabo de controle, ou seja, a câmera parece estar "pendurada no fio". Sua lente gira 360 ° na horizontal e 120 ° na vertical. De fato, existem duas câmeras no dispositivo ao mesmo tempo - funcionando diretamente e uma câmera para orientação. Além das lentes, uma luz de fundo, um dosímetro e um termômetro estão instalados na unidade. O dispositivo suporta a dose absorvida de até 1000 cinza.
A primeira versão da câmera funcionou em Fukushima em janeiro de 2018, onde encontrou o corium com sucesso e mediu o fundo em 530 Sv / h (53.000 raios-x). Mas o trabalho não terminou aí - era necessário coletar amostras para análise. Na versão atualizada do dispositivo, a luz de fundo foi aprimorada e um braço deslizante foi adicionado. Em fevereiro de 2019, a câmera com controle remoto da Toshiba recebeu pela primeira vez uma amostra de corium da segunda unidade de energia.
Máquina de limpeza
As instalações das unidades de energia precisarão ser desativadas mais cedo ou mais tarde, mas primeiro é necessário elaborar um mapa da poluição. Os resultados de várias missões de pesquisa mostraram um quadro muito sombrio: ao contrário das expectativas, a maioria dos radionuclídeos se instalou não no chão ou nas paredes, mas nos elementos de nível superior, como tubulações e ventilação - eles responderam por até 70% de toda a radiação. A descontaminação do piso é relativamente simples, as paredes são um pouco mais complicadas, mas como você chega à sujeira no teto e nos meandros dos canos, dado que a altura dos tetos no primeiro andar é de 7 a 8 metros?
 “Limpador” de radionuclídeos da Toshiba - sobe 8 metros de altura e raspa diligentemente as paredes. Fonte: IRID
“Limpador” de radionuclídeos da Toshiba - sobe 8 metros de altura e raspa diligentemente as paredes. Fonte: IRID
A Toshiba desenvolveu um robô operando um canhão com gelo seco - o pó de gelo cobre a superfície, prende partículas radioativas e o robô a raspa e se absorve. O mecanismo eleva a estrutura a uma altura de 8 metros. Por se tratar de outra máquina telecontrolada, seu operador recebe uma imagem de 22 câmeras ao mesmo tempo. A máquina começou a limpar as unidades de energia em janeiro de 2016. Sua produtividade é pequena, mas mesmo uma pequena contribuição para a descontaminação da estação é valiosa.
Ajuda, mas não solução
33 anos se passaram desde o acidente na usina nuclear de Chernobyl, desde então a tecnologia fez um grande avanço. Agora, dezenas de robôs e tipos de equipamentos de construção telecontrolados estão participando da eliminação das consequências em Fukushima. O site da TEPCO publicou muitos relatórios, cujos dados formam um quadro muito triste: existem robôs e existem tecnologias, mas nem todos chegaram perto da eficácia dos liquidatários de Chernobyl. O desenvolvimento e o teste de robôs levam meses e anos, e o resultado de seu trabalho é o avanço de uma dúzia de metros, a coleta de dados dosimétricos, o vídeo enlameado e o término frequente de missões devido a problemas imprevistos.
Todo robô em Fukushima é um povo salvo, e toda vida humana vale a pena se engajar no desenvolvimento de robôs.
Mas os planos atuais da TEPCO deixam claro que, segundo estimativas conservadoras, levará pelo menos 30 a 40 anos para lidar com as conseqüências do acidente. E isso apenas confirma o heroísmo e a escala da façanha dos liquidatários soviéticos de Chernobyl.