
A equipe que partiu para a ISS em 20 de julho de 2019 passou por sessões de treinamento com o robô FEDOR no centro de treinamento de cosmonautas (CPC).
Na continuação destas publicações:
A escotilha da sonda Soyuz MS-14 acabou sendo estreita para o robô FEDORComo modificar o robô FEDOR e a cadeira de vôo da ISSA rotação da tripulação está em andamento na ISS. Nesta semana, a ISS retornou à Terra a partir da ISS: o cosmonauta russo Oleg Kononenko, o canadense David Saint-Jacques e a americana Anne McClain.
Agora, na estação, estão: Alexey Ovchinin (Rússia), Tyler Nicholas Haig e Christina Koch (ambos dos EUA).

Em 20 de julho de 2019, está previsto o envio da ISS a bordo da espaçonave Soyuz MS-13, composta por: Alexander Skvortsov, Andrew Morgan e Luca Parmitano.
Assim, dois cosmonautas russos Alexander Skvortsov e Alexei Ovchinin trabalharão com o robô FEDOR na ISS, e seus colegas estrangeiros os ajudarão.

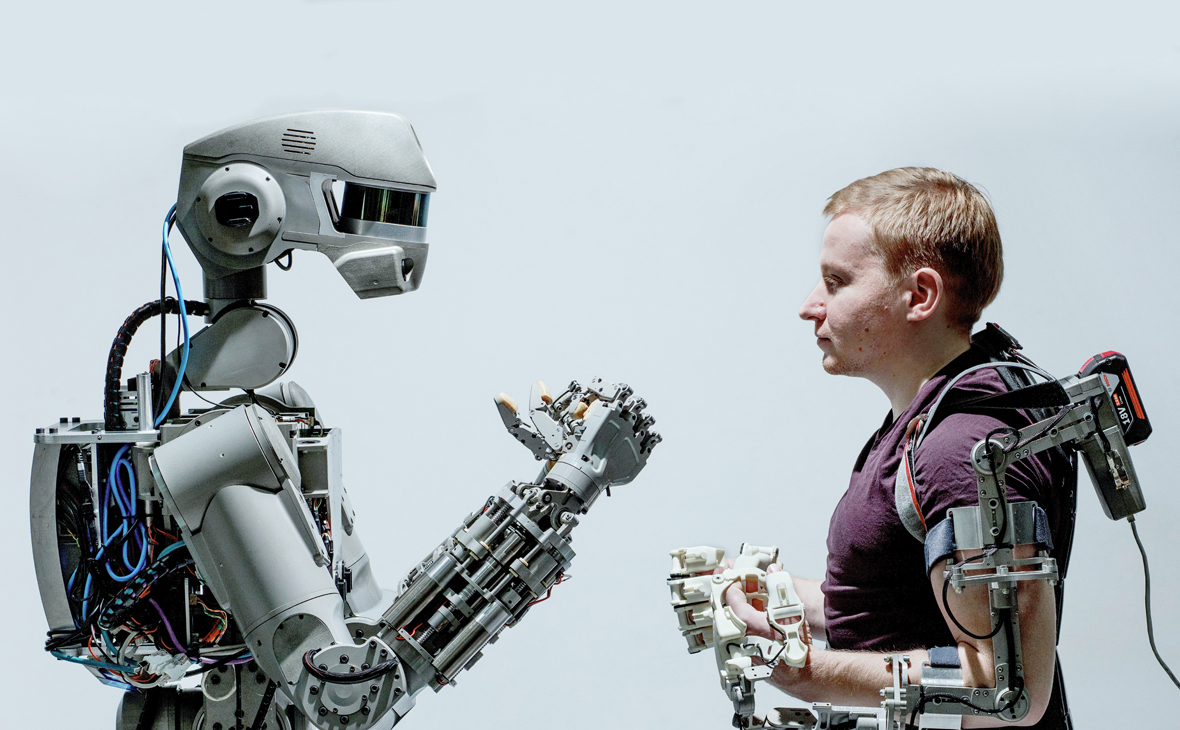
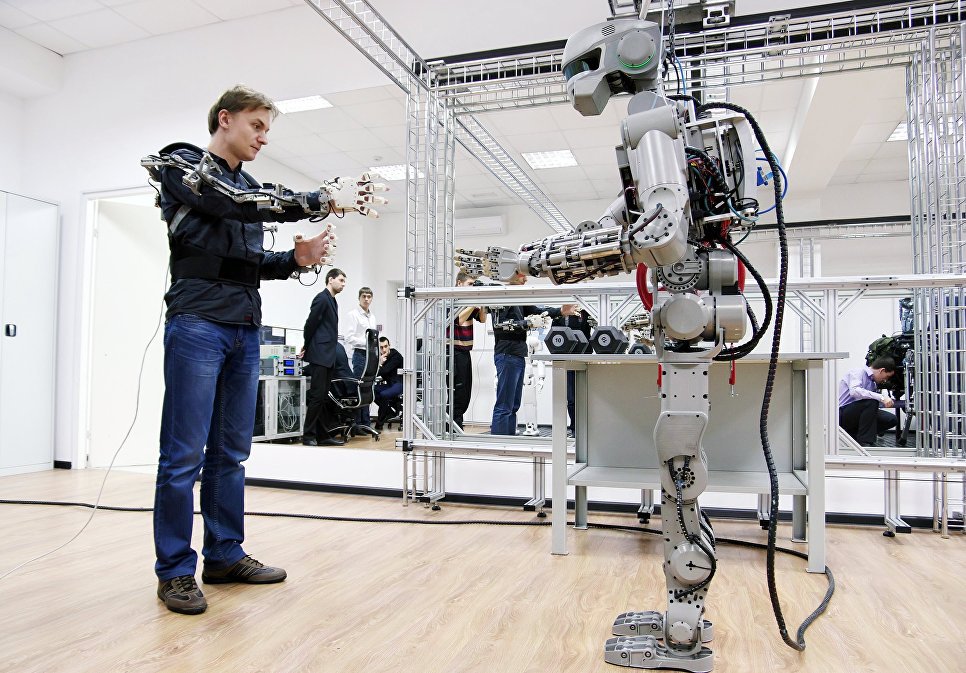
As primeiras sessões de familiarização do treinamento com o sistema de controle de robôs FEDOR já foram realizadas em Star City, incluindo o estudo de como operá-lo em gravidade zero.
Com base nos resultados desses eventos de treinamento, a nova equipe da ISS comentou alguns elementos do robô FEDOR, que serão eliminados pelos desenvolvedores e engenheiros da Roscosmos e da RSC Energia antes do voo.
 “Tivemos aulas com ele, essa tarefa apareceu de forma inesperada, tive que resolvê-la imediatamente. Existem alguns comentários sobre a preparação, mas esses são entendidos por astronautas que sabem o que é ausência de peso. Essas são algumas nuances, tenho certeza de que elas serão eliminadas e espero que o resultado do trabalho com o FEDOR seja positivo e interessante, e a primeira panqueca não seja irregular. Você verá isso nas nossas filmagens
“Tivemos aulas com ele, essa tarefa apareceu de forma inesperada, tive que resolvê-la imediatamente. Existem alguns comentários sobre a preparação, mas esses são entendidos por astronautas que sabem o que é ausência de peso. Essas são algumas nuances, tenho certeza de que elas serão eliminadas e espero que o resultado do trabalho com o FEDOR seja positivo e interessante, e a primeira panqueca não seja irregular. Você verá isso nas nossas filmagens ”, disse o astronauta Alexander Skvortsov, sem especificar a natureza dos comentários.
O robô FEDOR na ISS será controlado no modo avatar. Agora, o cosmonauta Alexander Skvortsov está apenas treinando e passando por treinamento para estudar o uso do robô, aprendendo a controlar seus movimentos com a ajuda de um traje especial que captura os movimentos de uma pessoa e os transfere para os sensores do robô.
"Acontece que ele se parece com um avatar", disse Alexander Skvortsov, respondendo à pergunta se o FEDOR será o primeiro mecanismo andróide na estação.
“Ele (FEDOR) é eficiente, mas vamos manter um pouco de intriga. As tarefas diante dele diminuíram, não haverá muito tempo. Não darei voz às tarefas - o que farei e ele - a fazer comigo. É interessante, você verá tudo ", intrigou Aleksanr Skvortsov.
Acontece que a ISS já preparou um local para o robô FEDOR, portanto sua implantação na estação e comissionamento não levará muito tempo.
Depois de atracar, ele será transferido do navio para o segmento russo da estação.
A fonte de alimentação do robô FEDOR durante o voo dentro da espaçonave Soyuz e na ISS será realizada a partir de baterias externas, e não através de cabos dos sistemas elétricos do navio e da estação.
Por sua vez, o chefe do Centro de Treinamento de Cosmonautas (CPC) Pavel Vlasov confirmou que os principais experimentos com o robô FEDOR serão realizados pela equipe que partirá para a ISS em 20 de julho de 2019, de acordo com o cronograma de trabalho.
"A partir do novo, o que a tripulação avaliará pela primeira vez e observaremos a possibilidade do funcionamento do primeiro sistema robótico sério como um robô FEDOR ", disse Pavel Vlasov, falando sobre as tarefas da próxima expedição à ISS.
Sob as condições da ISS, os astronautas avaliarão a correção dos cálculos do projeto ao criar o robô FEDOR e as perspectivas de implementação deste projeto para fornecer suporte robótico à equipe da estação com a perspectiva de voos longos.
No entanto, até agora não se
falou do robô FEDOR entrando no espaço sideral , mas na verdade é interessante para a astronáutica.
“Vamos comer o elefante em partes. Primeiro de tudo, ele é criado precisamente como suporte para a tripulação em atividades extra-navio. Mover-se na superfície da estação em seu tamanho atual com um campo de futebol não é fácil e rápido. O suporte pode ser elementar - transporte de algum tipo de ferramenta, mas existem muitas aplicações possíveis ”, afirmou Pavel Vlasov.
Agora estamos trabalhando e ajustando o plano de tarefas que o robô FEDOR terá que executar.
Anteriormente, ele já havia indicado a execução de doze experimentos, no entanto, provavelmente, apenas de quatro a seis tarefas que o robô FEDOR repetirá depois que a pessoa for incluída no programa final.
Gostaria de saber se haverá tarefas que, juntamente com os robôs do projeto Astrobee,
que já estão na ISS , possam ser implementadas com o FEDOR.
Sobre o vôo do robô FEDORO esquema de vôo de dois dias será aplicado ao lançar a espaçonave Soyuz MS-14 com o veículo de lançamento do robô FEDOR Soyuz-2.1a.
O lançamento do veículo de transporte Soyuz MS-14 no veículo de lançamento Soyuz-2.1a está previsto para agosto de 2019.
O voo do navio ocorrerá no modo não tripulado, o que aumentará a carga útil várias vezes devido à falta de alguns dos instrumentos e montagens necessários para garantir o trabalho da tripulação.
O navio não tripulado Soyuz MS não é uma nova modificação do navio tripulado. Esta versão do Soyuz MS se distingue do navio serial habitual pelo sistema de controle de movimento e navegação (SUDN) atualizado e pelo refinamento correspondente de sistemas aéreos individuais.
Durante o voo, este sistema será testado e a integração da espaçonave Soyuz MS-14 com o veículo de lançamento Soyuz 2.1a será verificada.
O veículo de lançamento Soyuz-2.1a será substituído como um meio de levar pessoas para a órbita Soyuz-FG pelo sistema de controle ucraniano. O estoque desses mísseis está quase esgotado.