Posts da série:
8. Nós controlamos a partir do telefone-ROS Control, GPS-node7. Localização do robô: gmapping, AMCL, pontos de referência no mapa da sala6. Odometria com codificadores de roda, mapa da sala, lidar5. Trabalhamos em rviz e gazebo: xacro, novos sensores.4. Crie uma simulação de robô usando os editores rviz e gazebo.3. Acelere, troque a câmera, conserte a marcha2. Software1. FerroComeçando a estudar o ROS (sistema de operação robótica), você se surpreende com o fato de "tudo ser complicado", a partir da quantidade de informações sobre tópicos, nós, ações, sua cabeça está girando. E, o primeiro desejo é voltar a gerenciar o robô para os bons scripts antigos. Mas não. Todo homem adulto deve coletar algo menos para um homem que dirija, pisque, chie. O ROS foi escolhido como plataforma, pois ainda é o próximo passo no desenvolvimento de robôs no mundo do arduino sem alma. Propõe-se montar o "carrinho" do ROS, que será não só barato, mas também funcional: ele pode ir ao longo da linha no chão com seu gato, seu corpo :) Os primeiros passos serão:
Some more lyrics
A segunda coisa que impressiona ao estudar o ROS é o custo das plataformas no mercado. Um conjunto de hambúrguer de tartaruga (
como um dos mais acessíveis ) - US $ 549 (34.500 p.). Tudo o resto é ainda mais caro. Aqui pode-se argumentar que a maior parte do preço é o lidar, um dispositivo para determinar a posição do robô no espaço. Que por si só fica abaixo de 15k p. No entanto, todos os outros componentes também não são baratos.
Vamos calcular quanto custará nosso "carrinho":
Total: 8000 p.
O preço também é alto, mas uma ordem de magnitude mais barata que o turtlebot. Se desejado, os carros podem ser impressos em uma impressora 3D ou levar um pedaço de madeira compensada. Resta apenas usar motores de corrente contínua. A bateria de framboesa também pode ser substituída por uma analógica mais barata, o principal é que ela produz 5V 3A.
Nós coletamosO projeto foi baseado em um projeto já existente -
www.rosbots.com/build_it , mas com modificações significativas. Além disso, o projeto básico, a julgar pelas informações do site, foi abandonado; portanto, você deve lembrar de tudo.
O início da montagem e montagem dos motores é semelhante às instruções acima:
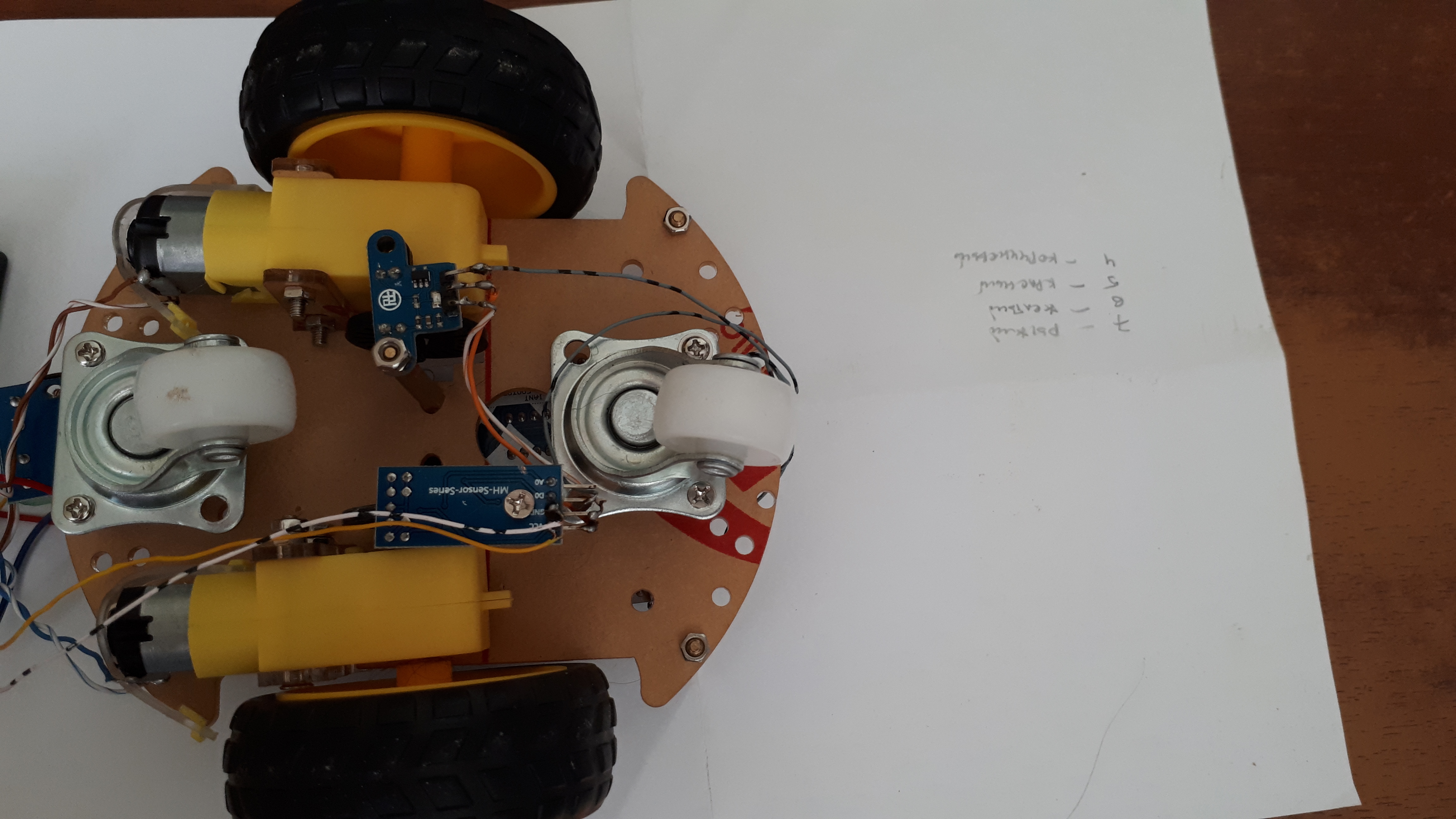
Aqui você precisa prestar atenção nos codificadores, que são montados de forma que "cubram" os discos com slots, vestidos com motores:
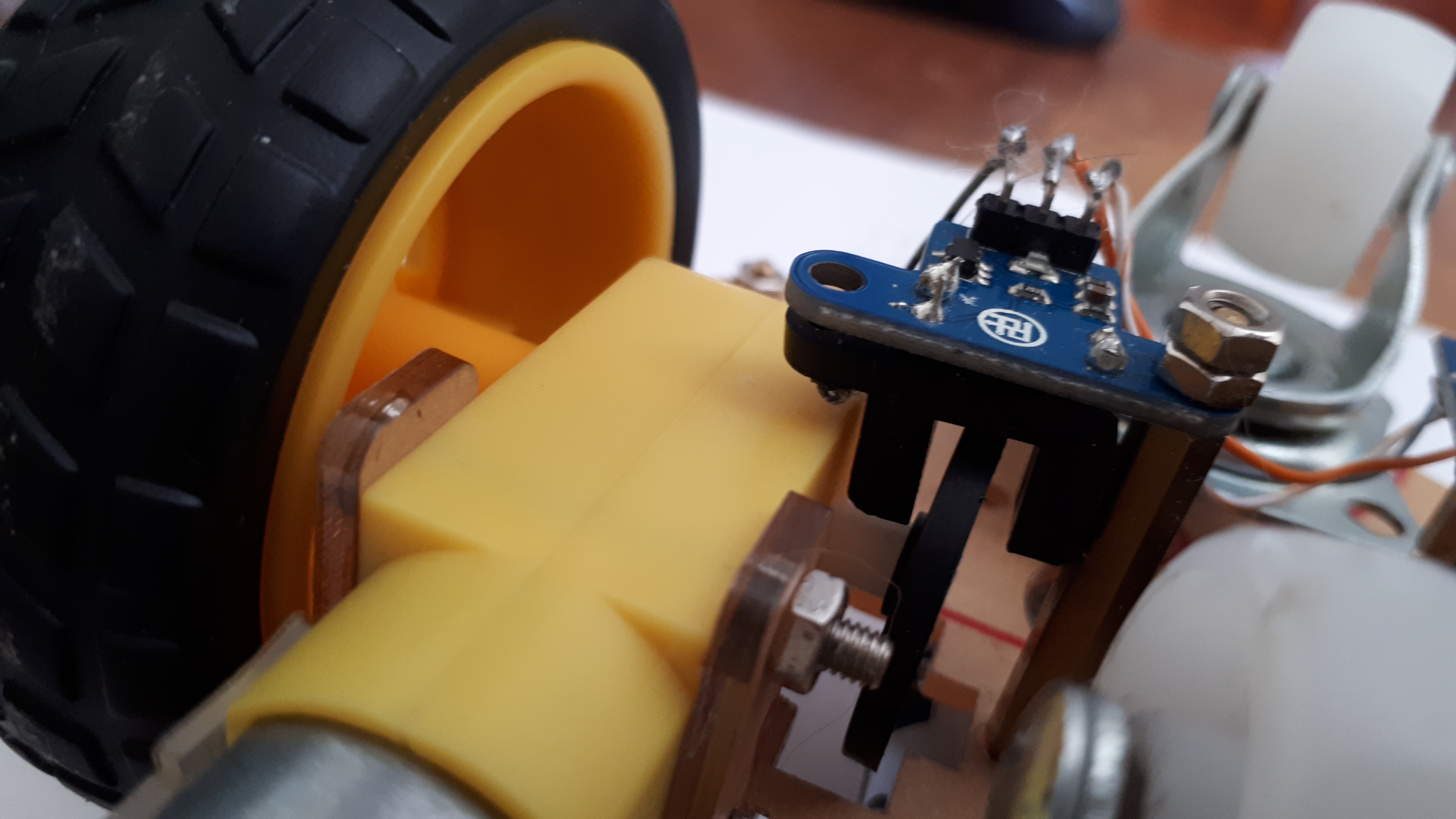
* Em geral, os codificadores não são muito úteis e você não pode montá-los. Os codificadores ópticos permitem determinar a distância percorrida, mas, infelizmente, eles não permitem determinar a direção do movimento.
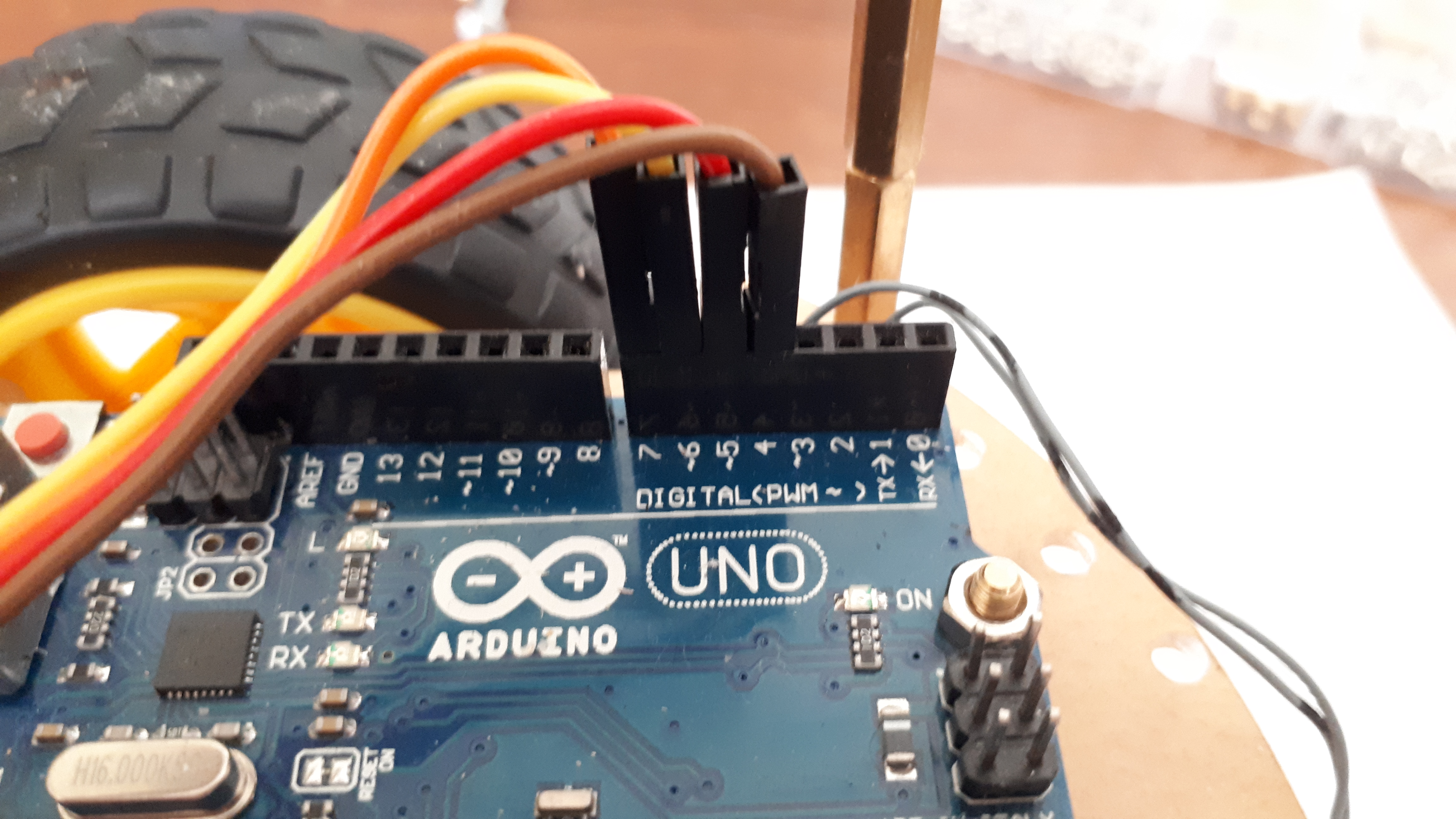
Após a instalação dos motores e codificadores (opcional), conectamos os fios ao uno arduino, ao driver do motor, ao compartimento de 2 18650 baterias. O diagrama de conexão é semelhante ao publicado no site do projeto base, com uma exceção:

5V para codificadores podem ser obtidos com o arduino (VCC do sensor de velocidade direita e sensor de velocidade esquerda no arduino de 5V).
Corrigimos o arduino e o driver do motor, potência para o driver:

Macarrão mais perto:
Motorista. Os terminais verdes contêm pares de fios dos motores:

O Arduino não será alimentado por baterias, será conectado ainda via usb à framboesa.
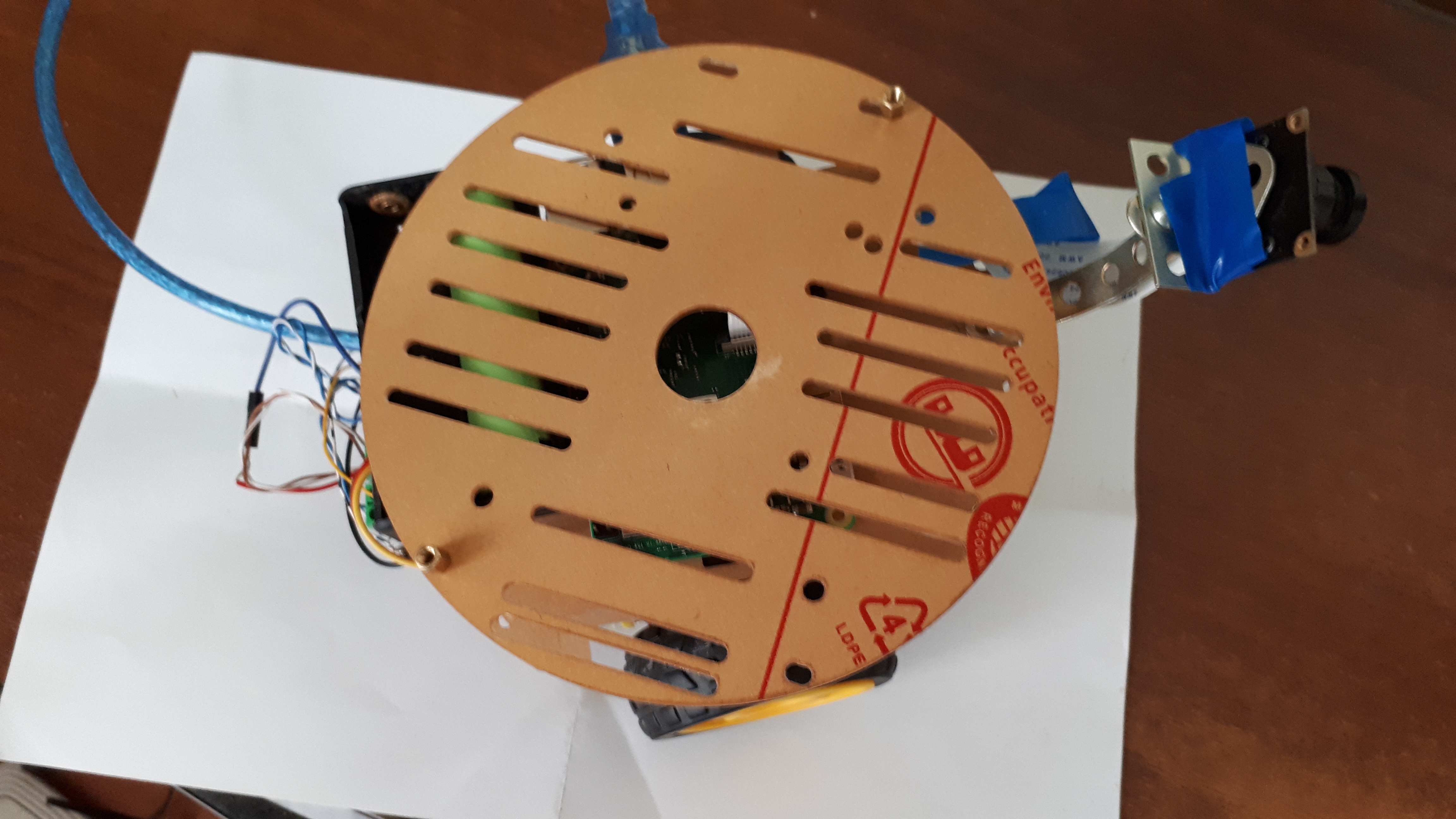
Colocamos a segunda camada da máquina
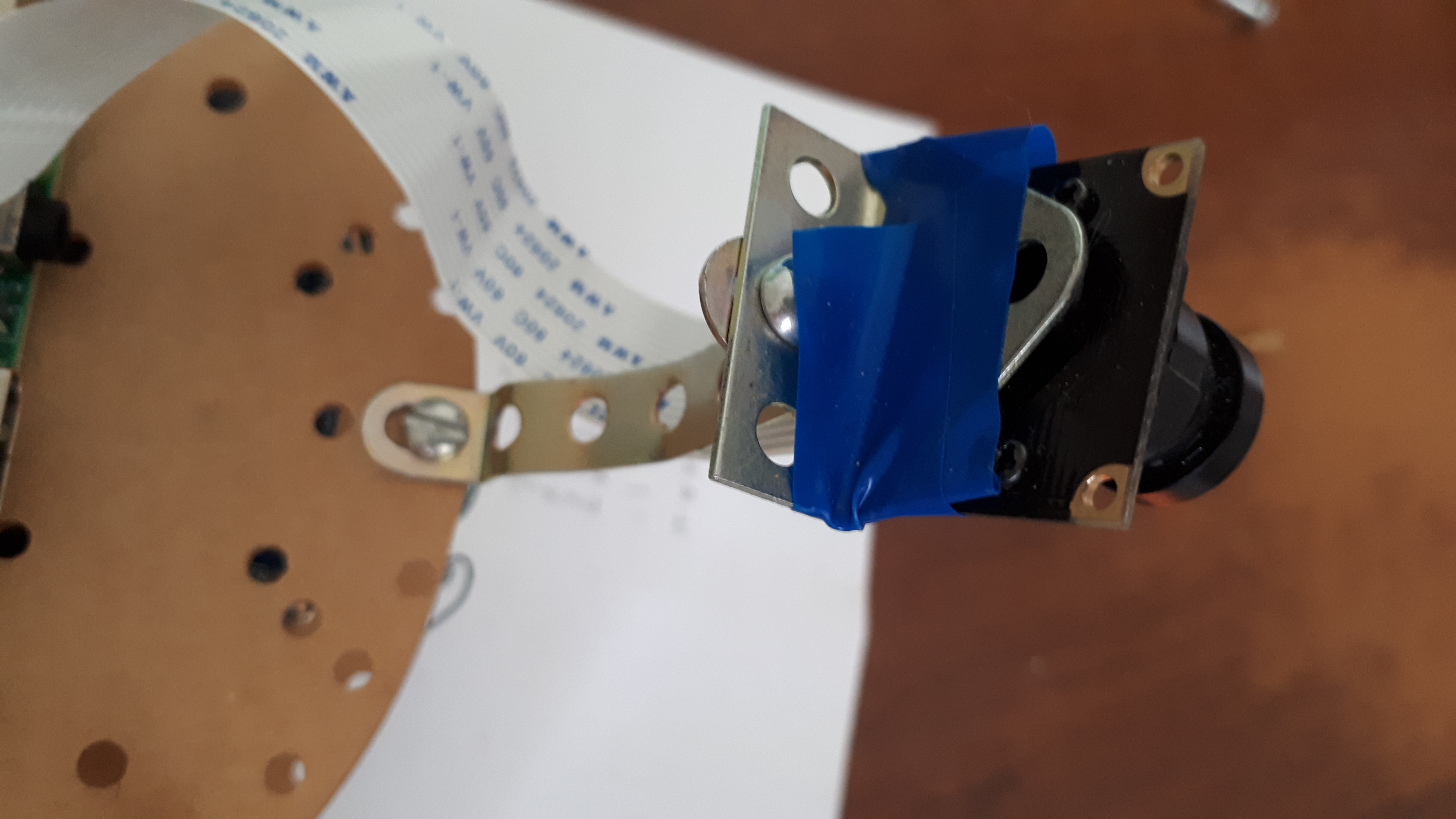
Aqui estará localizado o compartimento da bateria, raspberry pi, a câmera com os detalhes do designer soviético:
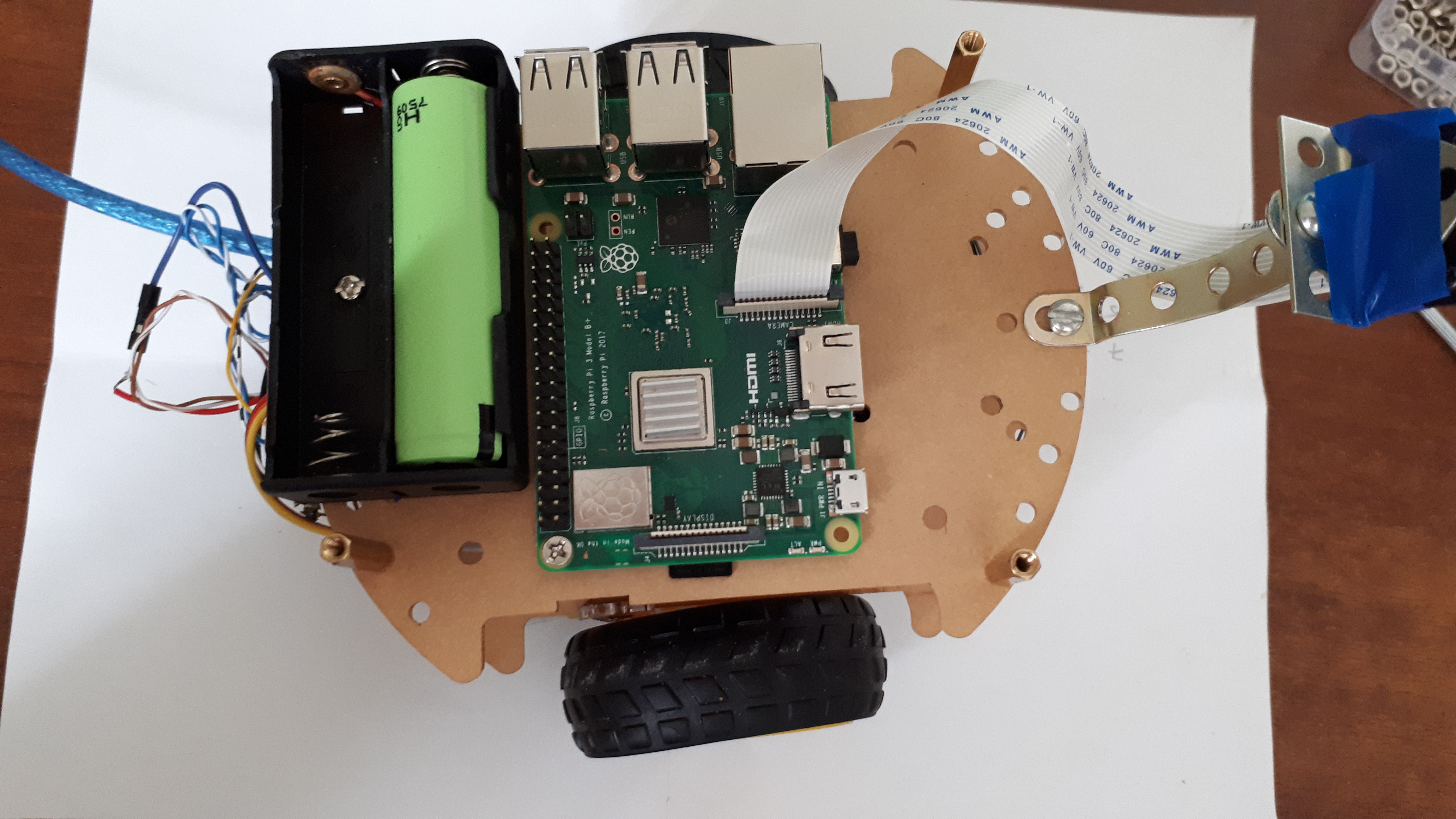
Não se esqueça de conectar corretamente o cabo da câmera à framboesa:

Designer soviético em:
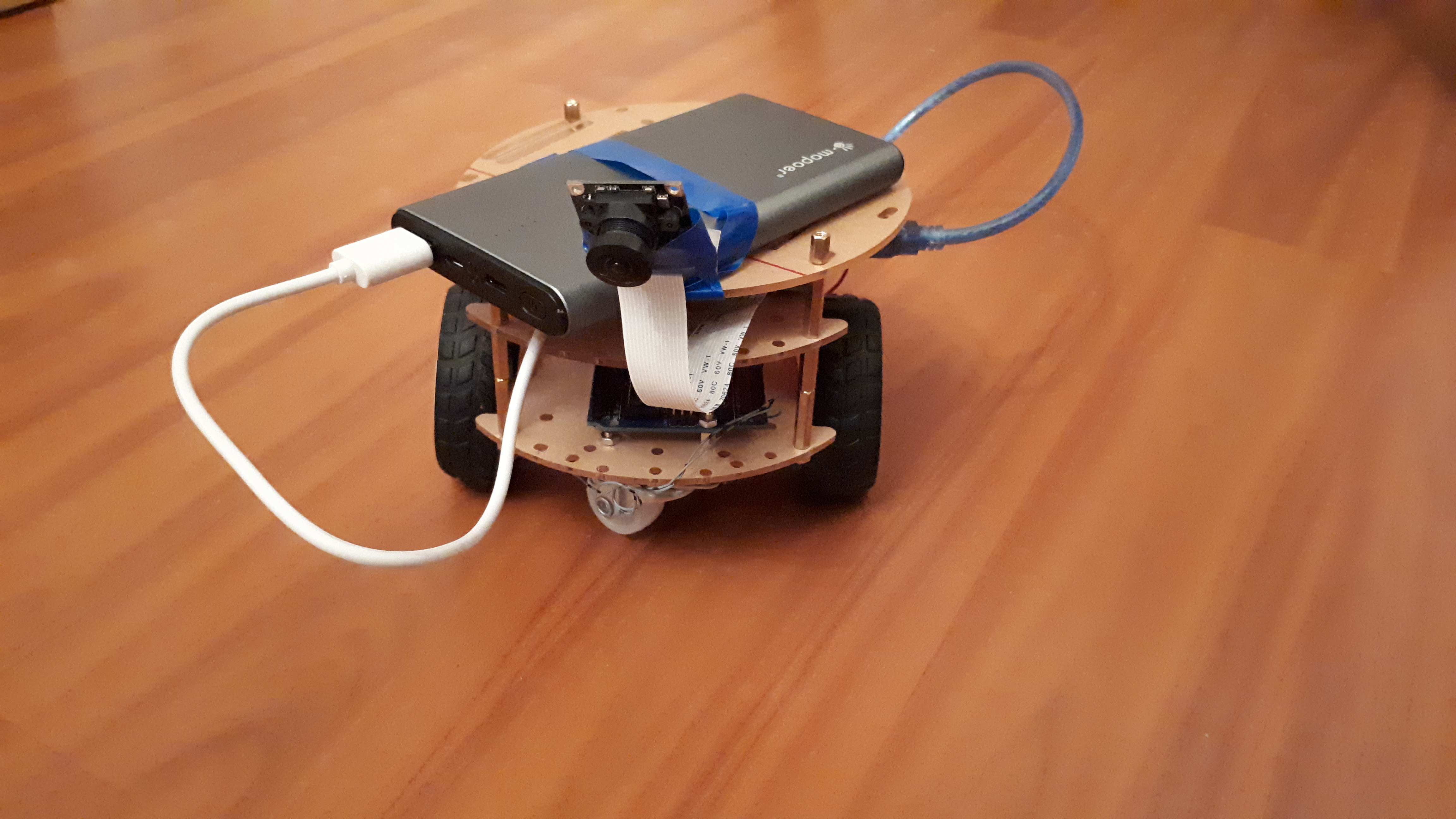
 Feche o hambúrguer, a terceira camada do "carrinho"
Feche o hambúrguer, a terceira camada do "carrinho" .
Aqui irá conduzir um banco de potência para framboesa:

* Um pouco sobre o powerbank para alimentar o raspberry pi:
:
Tudo, o carro está pronto!
Nas postagens a seguir, falaremos diretamente sobre ROS, linhas, corpo, gatos e sorrisos.
Dicas e críticas impiedosas são bem-vindas!
* O diagrama de fiação é atualizado.