 Nota 16 de julho de 2019 Elon Musk apresentou a tecnologia, que foi uma das primeiras tentativas sérias de introduzir neurointerfaces na prática clínica e ter objetivos transumanos reais a longo prazo. Este artigo é uma tradução, com algumas notas, do artigo original que descreve a tecnologia da interface do neurocomputador, cujo link também é publicado no site da empresa desenvolvedor Neuralink . O artigo descreve os recursos e as características dos principais módulos subjacentes a esta tecnologia, incluindo: microeletrodos biocompatíveis flexíveis, um manipulador neurocirúrgico robótico para a introdução de eletrodos no cérebro, bem como microeletrônica especializada que fornece recepção, amplificação e digitalização do sinal da atividade neural.
Nota 16 de julho de 2019 Elon Musk apresentou a tecnologia, que foi uma das primeiras tentativas sérias de introduzir neurointerfaces na prática clínica e ter objetivos transumanos reais a longo prazo. Este artigo é uma tradução, com algumas notas, do artigo original que descreve a tecnologia da interface do neurocomputador, cujo link também é publicado no site da empresa desenvolvedor Neuralink . O artigo descreve os recursos e as características dos principais módulos subjacentes a esta tecnologia, incluindo: microeletrodos biocompatíveis flexíveis, um manipulador neurocirúrgico robótico para a introdução de eletrodos no cérebro, bem como microeletrônica especializada que fornece recepção, amplificação e digitalização do sinal da atividade neural.Anotação
As interfaces neuro-computador (IMC - interface cérebro-máquina) oferecem uma oportunidade de restaurar a função sensorial e motora, bem como o tratamento de distúrbios neurológicos, mas até agora o IMC ainda não recebeu ampla distribuição clínica, em parte devido ao número insuficiente de canais que limitavam seu potencial. Neste white paper, descrevemos os primeiros passos da Neuralink em direção a um sistema de banda larga IMC escalável. Criamos matrizes de “fios” pequenos e flexíveis - eletrodos, nos quais até 3072 eletrodos são distribuídos por 96 fios. Também criamos um robô neurocirúrgico capaz de implantar seis fios (192 eletrodos) por minuto. Cada fio pode ser inserido individualmente no cérebro com uma precisão de mícrons para evitar danos à rede vascular superficial e atingir uma meta em uma área precisamente definida do cérebro. O conjunto de eletrodos é embalado em um pequeno dispositivo implantável que contém microcircuitos especiais para amplificação e digitalização embutidas de sinal de baixa potência: o pacote para 3072 canais tem dimensões de 23 × 18,5 × 2 mm e um volume de 0,851 cm3. Um cabo USB-C permite a transmissão de dados de um dispositivo com largura de banda total e gravação simultânea de todos os canais. Até 85,5% dos eletrodos implantados registravam diretamente picos de atividade neuronal. A abordagem da Neuralink ao IMC possui densidade e escalabilidade de eletrodos sem precedentes, permitindo o uso clínico na montagem.
1. Introdução
A interface cérebro-máquina (IMC) pode ajudar pessoas com uma ampla variedade de distúrbios clínicos. Por exemplo, os pesquisadores demonstraram a capacidade de controlar o uso de cursores de computador para neuroestéticas [1, 2, 3], membros robóticos [4, 5] e sintetizadores de fala [6] usando, em todos esses exemplos, não mais que 256 eletrodos. Embora esses avanços sugiram que a transferência de informações de alta precisão entre o cérebro e as máquinas seja possível, o desenvolvimento do IMC foi criticamente limitado pela incapacidade de registrar sinais de um grande número de neurônios. As abordagens não invasivas podem registrar uma média de milhões de neurônios através do crânio, mas esse sinal é distorcido e inespecífico [7, 8]. Eletrodos invasivos localizados na superfície do córtex podem registrar sinais úteis, mas são limitados na medida em que medem a atividade de milhares de neurônios e não conseguem registrar sinais profundos no cérebro [9]. A maioria dos IMCs usa métodos invasivos, porque a leitura mais precisa das representações neurais requer o registro de potenciais de ação de neurônios únicos em conjuntos distribuídos e funcionalmente relacionados [10].
Microeletrodos são o padrão ouro da tecnologia para registrar potenciais de ação, mas até agora não havia uma tecnologia de microeletrodos clinicamente desenvolvida que pudesse ser escalada para registrar a atividade de um grande número de neurônios [11]. Isso exigirá um sistema criado a partir de materiais com propriedades especiais que forneçam alta biocompatibilidade, segurança e durabilidade. Além disso, este dispositivo também exigirá uma abordagem cirúrgica prática e equipamentos eletrônicos de baixa potência e alta densidade para fornecer desempenho de implante totalmente sem fio.
A maioria dos dispositivos para gravação neural de longo prazo são conjuntos de eletrodos feitos de metais duros ou semicondutores [12, 13, 14, 15, 16, 17, 18]. Enquanto grades rígidas de metal facilitam a penetração no cérebro, o tamanho, o módulo de Young, a incompatibilidade na rigidez à flexão entre sondas rígidas e tecido cerebral podem estimular respostas imunes que limitam a função e a durabilidade desses dispositivos [19, 11]. Além disso, a geometria fixa dessas matrizes limita as populações de neurônios que podem ser acessadas, principalmente devido à presença da vasculatura.
Uma abordagem alternativa é usar sondas poliméricas finas e flexíveis de múltiplos eletrodos [20, 21]. O tamanho menor e a maior flexibilidade dessas sondas devem proporcionar maior biocompatibilidade. No entanto, a desvantagem dessa abordagem é que as sondas finas de polímero não são rígidas o suficiente para serem inseridas diretamente no cérebro; sua introdução deve ser fornecida com reforços [22, 21], injeção [23, 24] ou outras abordagens [25], e todas elas são bastante lentas [26, 27]. A fim de satisfazer os requisitos funcionais dos NQIs de alta largura de banda, aproveitando os dispositivos de filme fino, desenvolvemos uma abordagem robótica na qual um grande número de sondas de polímero finas e flexíveis são efetivamente e independentemente inseridas em várias regiões do cérebro [28].
Aqui, relatamos o progresso do Neuralink na criação de um IMC flexível e escalável, que aumenta o número de canais em uma ordem de magnitude em comparação com o trabalho anterior. Nosso sistema consiste em três componentes principais: sondas de polímero ultrafino (seção 2 deste relatório), um robô neurocirúrgico (seção 3) e eletrônicos especializados de alta densidade (seção 4). Demonstramos uma tecnologia que permite a rápida implantação de 96 filamentos de polímeros, cada um dos quais contendo 32 eletrodos, para um total de 3072 eletrodos.
Desenvolvemos uma eletrônica especializada em miniatura, que nos permite transmitir simultaneamente todos os dados da eletrofisiologia de banda larga de todos esses eletrodos (seção 5). Empacotamos esse sistema de maneira a permitir sua implantação a longo prazo e desenvolvemos um software especial para a detecção on-line de picos de atividade dos neurônios, que podem detectar potenciais de ação de baixa latência. Juntos, esse sistema serve como uma plataforma de pesquisa moderna e o primeiro protótipo de uma interface de neurocomputador humano totalmente implantável.
2. Tópicos
 Figura 1
Figura 1 : Nossas novas sondas de polímero (roscas). A. Sonda de borda linear, com 32 contatos de eletrodo espaçados 50 mícrons. B. Uma sonda "em forma de árvore" com 32 contatos de eletrodo espaçados em 75 mícrons. C. Imagem maior dos eletrodos individuais da estrutura A, enfatizando sua pequena superfície geométrica. D. Distribuição da impedância do eletrodo (medida em 1 kHz) para dois tratamentos de superfície: PEDOT (n = 257) e IrOx (n = 588).
Desenvolvemos um processo individual para a fabricação de sondas neurais com uma distância mínima entre os eletrodos, que utilizam uma variedade de materiais de filme fino biocompatíveis. O principal substrato e dielétrico usado nessas sondas é a poliimida, que cobre uma fina película de ouro. Cada matriz de filme fino consiste em uma região de “filamento”, que possui contatos, trilhas de eletrodos e uma região de “sensor”, onde um filme fino é conectado a microcircuitos não padrão que fornecem amplificação e recepção de sinal. O processo de microprodução no nível da bolacha garante sua alta produtividade. Cada placa é revestida com dez dispositivos de película fina que recebem um sinal de um total de 3072 contatos de eletrodo.
48 ou 96 threads são conectados a cada array, cada um dos quais contém 32 eletrodos independentes. Os circuitos integrados são conectados aos contatos na área do sensor de filme fino usando o processo de ligação de chip flip (nota: https: //en.wikipedia.org/wiki/Flip_chip).
Um dos objetivos dessa abordagem é atingir a menor área de seção transversal possível do fio para minimizar o deslocamento de tecido no cérebro. Para conseguir isso, mantendo um alto número de canais, litografia de projeção passo a passo e outros métodos de microprocessamento são usados para obter um filme de metal com resolução submicron.
Projetamos e fabricamos mais de 20 tipos diferentes de filamentos e eletrodos para nossas matrizes; dois exemplos de construção são mostrados nos painéis A e B na fig. 1. Fizemos filamentos com uma largura de 5 a 50 mícrons, que incluem locais de gravação de várias geometrias (Fig. 1). A espessura da rosca é de 4 a 6 mícrons, que inclui até três camadas de isolamento e duas camadas de condutor. O comprimento típico do fio é de cerca de 20 mm. Antes da inserção, o parileno-C é aplicado aos fios para formar um filme no qual os fios permanecem presos até que o robô cirúrgico os remova. Cada linha termina com um loop (16 × 50) μm2 para acomodar a linha da agulha.
Como seções individuais do eletrodo de ouro têm pequenas áreas geométricas de superfície (Fig. 1C), usamos modificações na superfície para reduzir a impedância para a eletrofisiologia e aumentar a capacidade efetiva de suporte da superfície (Fig. 1D). Dois desses tratamentos que utilizamos foram polietilenodioxitiofeno polimérico eletricamente condutivo, dopado com sulfonato de poliestireno (PEDOT: PSS) [29, 30] e óxido de irídio (IrOx) [31, 32]. Nos testes de bancada, foram obtidas impedâncias de 36,97 ± 4,68 kOhm (n = 257 eletrodos) e 56,46 ± 7,10 kOhm (n = 588) para PEDOT: PSS e IrOx, respectivamente. A menor impedância do PEDOT: PSS é promissora, mas a estabilidade e a biocompatibilidade a longo prazo do PEDOT: PSS são menos confiáveis do que para o IrOx. Esses métodos e processos podem ser aprimorados e estendidos a outros tipos de revestimentos e materiais de eletrodos condutores.
3. Robô neurocirúrgico
 Figura 2 : Tamanho do cartucho do cartucho de agulha Pincher (NPC) em comparação com uma moeda de um centavo.
Figura 2 : Tamanho do cartucho do cartucho de agulha Pincher (NPC) em comparação com uma moeda de um centavo.Polímeros de película fina foram usados anteriormente para sondas de eletrodo [21], mas sua baixa rigidez à flexão complicou o processo de inserção. A Neuralink desenvolveu uma abordagem com inserção robótica de sondas flexíveis [28], que permite a inserção rápida e confiável de um grande número de sondas poliméricas destinadas a impedir danos à vasculatura e registros de pequenas áreas do cérebro. A cabeça de injeção do robô é posicionada com precisão de 10 mícrons em uma plataforma de três eixos medindo 400 mm × 400 mm × 150 mm e segura um pequeno conjunto de “porta agulha” rapidamente substituível (Fig. 2, Fig. 3A).
A agulha é fresada a partir de um fio de tungstênio-rênio com um diâmetro de 40 μm e, por meio de gravação eletroquímica, seu diâmetro é reduzido para 24 μm ao longo do comprimento inserido (Fig. 2A). A ponta da agulha é projetada para engatar alças para inserção - para transportar e inserir fios individuais - e para penetrar nas meninges e no tecido cerebral. A agulha é acionada por um motor linear, proporcionando uma velocidade de entrada variável e aceleração rápida da retração (até 30.000 mm s-2) para facilitar a separação da sonda e da agulha. O pincher é um fio de tungstênio com um diâmetro de 50 μm, dobrado na ponta e com um acionamento nas direções axial e rotacional (Fig. 2B). Ele serve como suporte para as sondas durante o transporte e como guia para garantir que as linhas sejam inseridas ao longo do caminho da agulha. A Figura 4 mostra uma sequência de fotografias do processo de inserção de filamentos em uma simulação agária de tecido cerebral.
 Figura 3
Figura 3 : dispositivo robótico para introdução de eletrodos; uma visão ampliada da cabeça de entrada é mostrada na inserção. A. Suporte da agulha carregado. B. Sensor de contato da posição cerebral de baixo impacto. C. Módulos de luz com vários comprimentos de onda independentes. D. Motor da agulha. E. Uma das quatro câmeras focadas na agulha durante a inserção. F. Câmera com amplo ângulo de visão do campo cirúrgico. G. Câmeras estereoscópicas.
A cabeça do dispositivo robótico para introdução de linhas também possui uma pilha de câmeras para receber imagens (Fig. 3E-G), usadas para guiar a agulha no laço da linha, apontar antes de entrar, visualizar a entrada em tempo real e verificar. Além disso, a cabeça do dispositivo contém seis módulos de luz independentes, cada um dos quais capaz de se iluminar independentemente com um comprimento de onda de 405 nm, 525 nm e 650 nm ou luz branca (Fig. 3C). A iluminação de 405 nm excita a fluorescência da poliimida e permite que a pilha óptica e a visão computacional localizem com segurança o laço do filamento (16 × 50) μm2 e realizem o servocontrole submicron visual para direcionar a agulha iluminada pela luz de 650 nm através do laço. Câmeras estereoscópicas, cálculos monoculares de software com uma profundidade de campo estendida e iluminação de 525 nm tornam possível avaliar com precisão a localização da área da superfície do córtex cerebral.
O robô registra os locais em uma grade de coordenadas comum no crânio, que, combinada com o rastreamento de profundidade, tem como alvo preciso estruturas estruturais anatômicas definidas. Um pacote de software personalizado integrado permite pré-selecionar todos os pontos de inserção, permitindo planejar o caminho de inserção, minimizar a confusão e carregar em cada encadeamento. Uma das principais funções de planejamento é a capacidade de evitar danos à rede vascular durante a inserção, que é uma das principais vantagens da introdução dos eletrodos separadamente. Isso é especialmente importante porque acredita-se que o dano à barreira hematoencefálica desempenhe um papel fundamental na resposta inflamatória do cérebro a objetos estranhos [33].
O robô possui um modo de inserção automática, que permite inserir até 6 threads (192 eletrodos) por minuto. Apesar de todo o procedimento de injeção poder ser automatizado, o cirurgião mantém o controle total e, se desejado, pode realizar um micro-ajuste manual da posição do fio antes de cada introdução no córtex. O robô neurocirúrgico é compatível com um invólucro estéril e possui recursos que facilitam injeções rápidas e bem-sucedidas, como a esterilização automática por agulha ultrassônica. O cartucho do porta-agulha (NPC; Figura 2C) é a parte da cabeça da pastilha que está em contato direto com o tecido cerebral e é um item consumível que pode ser substituído durante a cirurgia em menos de um minuto.
 Figura 4
Figura 4 : 1. Um dispositivo para entrada com um fio que se aproxima da simulação de tecido cerebral. eu agulha e cânula (nota: agulha oca). ii. rosca inserida anteriormente. 2. A inserção toca a superfície, simulando o tecido cerebral. 3. A agulha penetra no tecido de imitação, entregando a linha a uma profundidade predeterminada. iii. inserção de linha. 4. O dispositivo de entrada da linha sai, deixando a linha no tecido. iv. fio implantado.
Utilizando este sistema, demonstramos o sucesso da administração em 87,1 ± 12,6% dos casos (média ± desvio padrão), após 19 operações. Durante o estudo, foram feitos ajustes manuais precisos para evitar danos à microvasculatura dos canais na superfície do córtex, o que aumentou o tempo total de administração do mais rápido. Mesmo levando em consideração essas correções, o tempo total de administração deste estudo foi em média de 45 minutos, com uma taxa aproximada de introdução de 29,6 eletrodos por minuto (Fig. 6). A introdução foi realizada com craniotomia bilateral de locais com área de (4 × 7) mm2 com intervalo> 300 μm entre os filamentos, a fim de maximizar a cobertura cortical. Isso demonstra que a inserção robótica de eletrodos finos de polímero é uma abordagem eficaz e escalável para registrar a atividade de um grande número de neurônios em áreas anatomicamente definidas do cérebro.
4. Eletrônica
A gravação contínua de sinais de milhares de eletrodos apresenta problemas significativos com eletrônicos e embalagens. A densidade dos canais de gravação requer a colocação do módulo de amplificação e a digitalização do sinal na montagem do próprio dispositivo; caso contrário, os requisitos para o cabo e o conector serão excessivamente altos. Este módulo de gravação deve amplificar sinais neurais fracos (<10 μVRMS), ao mesmo tempo suprimir ruído fora de banda, amostrar e digitalizar sinais amplificados e gerar os resultados para processamento em tempo real - todos usando a menor potência e tamanho possíveis.
A eletrônica é construída em nosso circuito integrado especializado (ASIC) para aplicações Neuralink, que consiste em 256 amplificadores programáveis individualmente (“pixels analógicos”), conversores analógico-digitais (ADCs) integrados e um circuito de controle periférico para serializar os sinais de saída digitalizados.
O pixel analógico é facilmente ajustável: as propriedades de ganho e filtro podem ser calibradas para levar em conta alterações na qualidade do sinal devido à variabilidade do processo e ao ambiente eletrofisiológico.
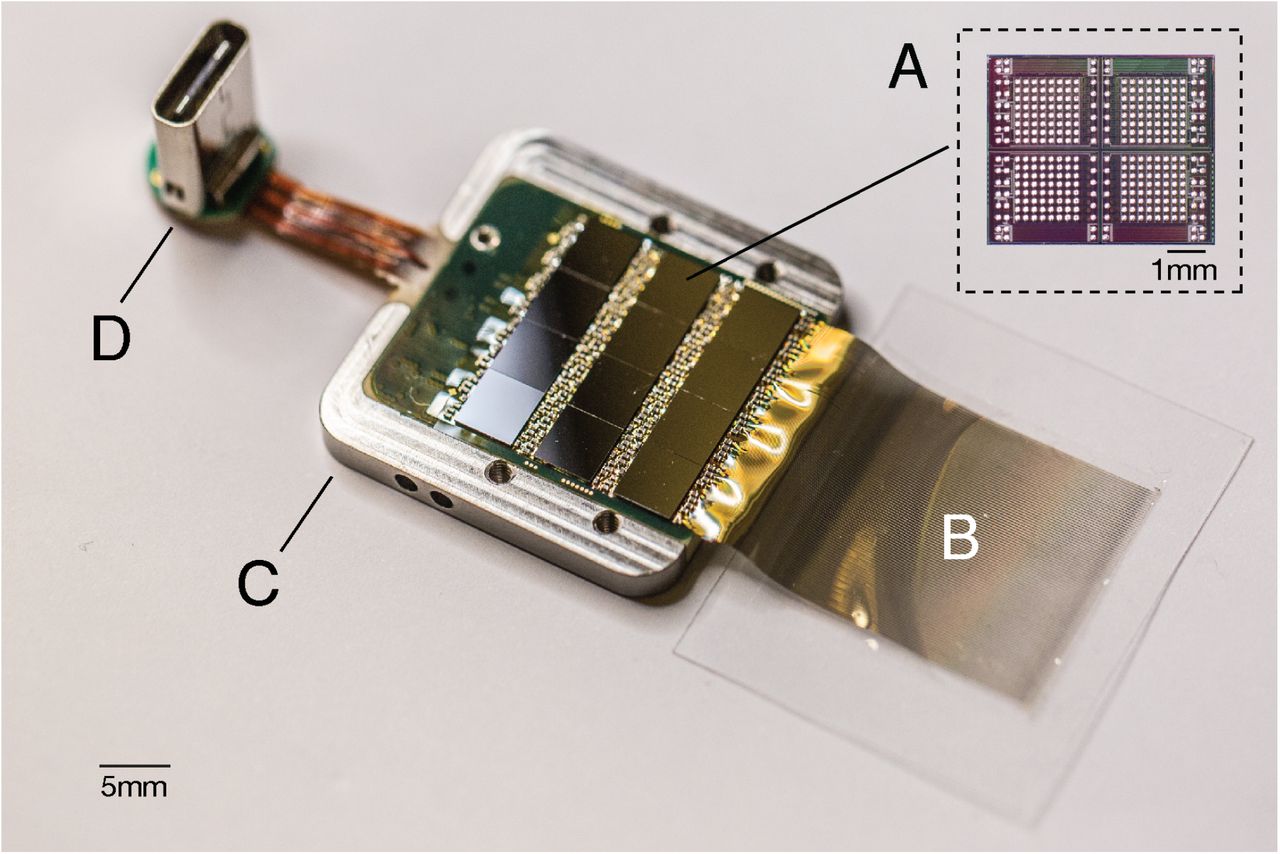
O ADC embutido realiza amostragem a uma frequência de 19,3 kHz com uma resolução de 10 bits. Cada pixel analógico consome 5,2 μW e o ASIC inteiro consome cerca de 6 mW, incluindo os drivers do relógio. As características do ASIC Neuralink são mostradas na Tabela 1, e uma fotografia do dispositivo fabricado é mostrada na Fig. 5A Figura 5 : Toque no dispositivo na embalagem. R. Cada chip individual em um ASIC é capaz de processar 256 canais de dados. Todo o conjunto do dispositivo contém 12 desses chips, que no total são 3072 canais. B. Fios de polímero à base de parileno. C. Caixa de titânio (tampa removida). D. Conector digital USB-C para transferência de energia e dados.O Neuralink ASIC é o núcleo de uma plataforma de gravação modular que facilita a substituição de componentes para pesquisa e desenvolvimento (Fig. 5). Nos sistemas discutidos aqui, vários ASICs são integrados a uma placa de circuito impresso padrão (PCB) usando o método de conexão flip-chip. Cada sistema consiste em uma matriz de portas programável pelo usuário (aprox. FPGA); sensores de temperatura, acelerômetro, magnetômetro em tempo real e um conector USB-C para transmissão de dados com largura de banda total. Os sistemas são embalados em invólucros de titânio revestidos com C-Parileno, que serve como barreira à umidade para impedir a penetração de líquidos e prolongar a vida útil.Descrevemos as configurações criadas: o sistema de gravação em 1536 canais (“Sistema A”) e o sistema de gravação em 3072 canais (“Sistema B”), na tabela 2. Enquanto o Sistema A usa a geração atual ASIC Neuralink, o Sistema B usa a anterior versão com funcionalidade comparável, mas com características de desempenho mais baixas. O sistema B foi projetado para maximizar a densidade do canal e é usado para aplicativos que exigem um número extremamente grande de canais. O sistema A, por outro lado, foi projetado para fornecer uma instalação mais rápida e confiável; ele pode ser instalado cinco vezes mais rápido que o sistema B, que é mais eficiente.
Figura 5 : Toque no dispositivo na embalagem. R. Cada chip individual em um ASIC é capaz de processar 256 canais de dados. Todo o conjunto do dispositivo contém 12 desses chips, que no total são 3072 canais. B. Fios de polímero à base de parileno. C. Caixa de titânio (tampa removida). D. Conector digital USB-C para transferência de energia e dados.O Neuralink ASIC é o núcleo de uma plataforma de gravação modular que facilita a substituição de componentes para pesquisa e desenvolvimento (Fig. 5). Nos sistemas discutidos aqui, vários ASICs são integrados a uma placa de circuito impresso padrão (PCB) usando o método de conexão flip-chip. Cada sistema consiste em uma matriz de portas programável pelo usuário (aprox. FPGA); sensores de temperatura, acelerômetro, magnetômetro em tempo real e um conector USB-C para transmissão de dados com largura de banda total. Os sistemas são embalados em invólucros de titânio revestidos com C-Parileno, que serve como barreira à umidade para impedir a penetração de líquidos e prolongar a vida útil.Descrevemos as configurações criadas: o sistema de gravação em 1536 canais (“Sistema A”) e o sistema de gravação em 3072 canais (“Sistema B”), na tabela 2. Enquanto o Sistema A usa a geração atual ASIC Neuralink, o Sistema B usa a anterior versão com funcionalidade comparável, mas com características de desempenho mais baixas. O sistema B foi projetado para maximizar a densidade do canal e é usado para aplicativos que exigem um número extremamente grande de canais. O sistema A, por outro lado, foi projetado para fornecer uma instalação mais rápida e confiável; ele pode ser instalado cinco vezes mais rápido que o sistema B, que é mais eficiente.
 Uma estação base conectada a uma rede local Ethernet converte fluxos de dados desses sistemas em pacotes multicast Ethernet 10G que permitem aos usuários subsequentes processar dados de várias maneiras, por exemplo, visualização de dados em tempo real [34] ou gravação em disco. Cada estação base pode conectar até três implantes simultaneamente. Os dispositivos são suportados adicionalmente por um ecossistema de software que oferece facilidade de uso com o princípio "plug and play" com configuração zero: o fluxo de dados é ativado automaticamente quando o cabo é conectado.
Uma estação base conectada a uma rede local Ethernet converte fluxos de dados desses sistemas em pacotes multicast Ethernet 10G que permitem aos usuários subsequentes processar dados de várias maneiras, por exemplo, visualização de dados em tempo real [34] ou gravação em disco. Cada estação base pode conectar até três implantes simultaneamente. Os dispositivos são suportados adicionalmente por um ecossistema de software que oferece facilidade de uso com o princípio "plug and play" com configuração zero: o fluxo de dados é ativado automaticamente quando o cabo é conectado.5. Eletrofisiologia
Implantamos ambos os sistemas A e B em ratos Long-Evans machos, conforme descrito na seção 3. Todos os procedimentos com animais foram realizados de acordo com as diretrizes do Conselho Nacional de Pesquisa para Cuidado e Uso de Animais de Laboratório e foram aprovados pelo Comitê de Uso e Cuidado de Animais Neuralink. Registros eletrofisiológicos foram feitos quando os animais exploraram livremente uma arena equipada com um cabo que permitia movimentos ilimitados. O sistema A pode gravar 1344 de 1536 canais simultaneamente; a configuração exata do canal pode ser especificada arbitrariamente durante a gravação; O sistema B pode gravar de todos os 3072 canais simultaneamente. Os sinais de banda larga digitalizados foram processados em tempo real para determinar os potenciais de ação dos neurônios (picos) usando o algoritmo de detecção on-line. Figura 6 : Implantação e montagem de roscas. A. Um exemplo de uma imagem ao vivo mostrando a superfície do córtex com fios implantados e sangramento mínimo. B. Conjunto do sensor ("Sistema B") implantado permanentemente no rato.Os requisitos de detecção de pico em tempo real para NQFs são diferentes dos estudos neurofisiológicos tradicionais. Enquanto a maioria dos eletrofisiologistas coloca os dados offline e gasta um esforço significativo na rejeição de eventos de pico positivos falsos, os eventos NQI devem ser detectados em tempo real e os parâmetros de detecção de pico devem maximizar o desempenho da decodificação. Usando nosso software dedicado de detecção de pico online, descobrimos que um filtro de resolução que permite falsos positivos de ± 0,2 Hz é melhor do que definir limites estritos que podem rejeitar picos reais (dados não mostrados).Dadas essas considerações, estabelecemos um limite em> 0,35 Hz para determinar o número de eletrodos que registraram picos. Como geralmente não classificamos os dados por picos, não relatamos várias unidades por canal. Os decodificadores de IMC geralmente trabalham sem classificação, com perda mínima de desempenho [36, 37]. Além disso, resultados recentes mostram que a seleção de pico não é necessária para uma avaliação precisa da dinâmica de uma população neural [38].Os dados de uma experiência recente usando o sistema A são mostrados na Fig. 7 e fig. 8. Nesta experiência, 40 das 44 tentativas de inserção foram bem-sucedidas (90%) para um total de 1280 eletrodos implantados, dos quais 1020 foram registrados simultaneamente. Os sinais de banda larga registrados a partir dos filamentos apresentados mostram os potenciais locais e o pico de atividade da Fig. 7. Um exemplo da saída do sistema de detecção de pico é mostrado como uma varredura na Fig. 8. Neste exemplo, duas configurações de gravação sobrepostas foram usadas para gravar de todos os 1.280 canais implantados. Nesse arranjo, nosso pico de produção chegou a 53,4% dos canais, e muitos picos apareceram em vários canais vizinhos, como foi observado em outros experimentos com alta densidade de eletrodos [16, 17, 21]. Em outras matrizes do sistema A, obtivemos um resultado de 59,10 ± 5,74% (média ± erro padrão da média) em 19 operações com um máximo de 85,5%.
Figura 6 : Implantação e montagem de roscas. A. Um exemplo de uma imagem ao vivo mostrando a superfície do córtex com fios implantados e sangramento mínimo. B. Conjunto do sensor ("Sistema B") implantado permanentemente no rato.Os requisitos de detecção de pico em tempo real para NQFs são diferentes dos estudos neurofisiológicos tradicionais. Enquanto a maioria dos eletrofisiologistas coloca os dados offline e gasta um esforço significativo na rejeição de eventos de pico positivos falsos, os eventos NQI devem ser detectados em tempo real e os parâmetros de detecção de pico devem maximizar o desempenho da decodificação. Usando nosso software dedicado de detecção de pico online, descobrimos que um filtro de resolução que permite falsos positivos de ± 0,2 Hz é melhor do que definir limites estritos que podem rejeitar picos reais (dados não mostrados).Dadas essas considerações, estabelecemos um limite em> 0,35 Hz para determinar o número de eletrodos que registraram picos. Como geralmente não classificamos os dados por picos, não relatamos várias unidades por canal. Os decodificadores de IMC geralmente trabalham sem classificação, com perda mínima de desempenho [36, 37]. Além disso, resultados recentes mostram que a seleção de pico não é necessária para uma avaliação precisa da dinâmica de uma população neural [38].Os dados de uma experiência recente usando o sistema A são mostrados na Fig. 7 e fig. 8. Nesta experiência, 40 das 44 tentativas de inserção foram bem-sucedidas (90%) para um total de 1280 eletrodos implantados, dos quais 1020 foram registrados simultaneamente. Os sinais de banda larga registrados a partir dos filamentos apresentados mostram os potenciais locais e o pico de atividade da Fig. 7. Um exemplo da saída do sistema de detecção de pico é mostrado como uma varredura na Fig. 8. Neste exemplo, duas configurações de gravação sobrepostas foram usadas para gravar de todos os 1.280 canais implantados. Nesse arranjo, nosso pico de produção chegou a 53,4% dos canais, e muitos picos apareceram em vários canais vizinhos, como foi observado em outros experimentos com alta densidade de eletrodos [16, 17, 21]. Em outras matrizes do sistema A, obtivemos um resultado de 59,10 ± 5,74% (média ± erro padrão da média) em 19 operações com um máximo de 85,5%. Figura 7 : Esquerda: sinais neurais de banda larga (não filtrados) obtidos simultaneamente de uma fita (32 canais) implantada no córtex cerebral de rato. Cada canal (linha) corresponde a uma porção do eletrodo no filamento (diagrama à esquerda; seções espaçadas a 50 μm). Picos e potenciais de campo locais são óbvios. Direita: formas de onda prospectivas (não classificadas); números indicam a localização do canal no fluxo. A forma de onda do meio é mostrada em preto.
Figura 7 : Esquerda: sinais neurais de banda larga (não filtrados) obtidos simultaneamente de uma fita (32 canais) implantada no córtex cerebral de rato. Cada canal (linha) corresponde a uma porção do eletrodo no filamento (diagrama à esquerda; seções espaçadas a 50 μm). Picos e potenciais de campo locais são óbvios. Direita: formas de onda prospectivas (não classificadas); números indicam a localização do canal no fluxo. A forma de onda do meio é mostrada em preto.6. Discussão
Descrevemos um NIR com um alto número de canais e uma resolução de um pico. É baseado em sensores de polímero flexíveis, um sistema de entrada robótico e eletrônicos especiais de baixa potência. Este sistema serve a dois propósitos principais: é uma plataforma de pesquisa para uso em roedores e serve como um protótipo para futuros implantes clínicos em humanos. A capacidade de iterar rapidamente estruturas e roedores de teste permite melhorar rapidamente dispositivos, processos de produção e software. Por ser uma plataforma de pesquisa, o sistema usa uma conexão com fio para maximizar o rendimento da transmissão de dados brutos. Isso é importante para avaliar o desempenho e é crítico para o desenvolvimento de algoritmos de processamento e decodificação de sinal. Em contraste,os dispositivos clínicos que serão fabricados nesta plataforma serão totalmente implantáveis, o que exigirá embalagem hermética e terá compressão de sinal incorporada, consumo de energia reduzido, transferência de energia sem fio e telemetria de dados através da pele sem o uso de fios. Figura 8 : Nossos dispositivos permitem a detecção de atividade neuronal generalizada, distribuída por várias áreas do cérebro e camadas corticais. Esquerda: os locais de injeção (círculos coloridos) são indicados na imagem do cérebro dos roedores. [35] Direita: rasterização de 1020 canais gravados simultaneamente, classificados por fluxos (a cor corresponde ao ponto de inserção). Barra lateral: uma imagem ampliada de picos de um segmento. Este fio corresponde ao mostrado na fig. 7)A modulação da atividade neuronal será uma parte importante das interfaces clínicas cérebro-máquina de última geração [39], por exemplo, para fornecer uma sensação de toque ou propriocepção para o controle dos movimentos neoprotéticos [40, 41]. Portanto, desenvolvemos o ASIC Neuralink, capaz de estimulação elétrica em cada canal, embora não tenhamos demonstrado essas capacidades aqui.Este sistema NQI tem várias vantagens sobre as abordagens anteriores. O tamanho e a composição das sondas de filme fino são mais adequados às propriedades do material do tecido cerebral do que as sondas de silício comumente usadas e, portanto, podem exibir biocompatibilidade aumentada [28, 21]. Além disso, a capacidade de escolher onde inserir nossas sondas, inclusive nas estruturas subcorticais, nos permite criar nossas próprias geometrias de matrizes para atingir determinadas áreas do cérebro sem danificar as redes vasculares. Esse recurso é importante para a criação de um NKI de alto desempenho, pois a distribuição de eletrodos pode ser ajustada dependendo dos requisitos da tarefa. FinalmenteA miniaturização e o design do Neuralink ASIC oferecem grande flexibilidade no design do sistema e suportam um número muito alto de canais com um tamanho prático e baixo consumo de energia.Basicamente, nossa abordagem às interfaces cérebro-máquina é extensível e escalável. Aqui, relatamos a gravação simultânea de banda larga de mais de 3.000 eletrodos inseridos em um rato que se move livremente. Em um cérebro maior, vários dispositivos com essa arquitetura podem ser facilmente implantados e, portanto, poderíamos interagir com um número muito maior de neurônios sem uma reengenharia séria. O desenvolvimento adicional da robótica cirúrgica pode nos permitir alcançar isso da mesma maneira, sem aumentar significativamente o tempo da cirurgia.Antes de um dispositivo com alta largura de banda se tornar adequado para uso clínico, será necessário resolver vários problemas tecnológicos sérios, mas agora é fácil imaginar que esse dispositivo permita que pacientes com lesões na medula espinhal controlem inteligentemente um mouse e teclado digitais. E em combinação com os métodos de estimulação da medula espinhal que melhoram rapidamente [42], no futuro essa abordagem poderá restaurar a função motora. As interfaces neurais de alto rendimento devem fornecer muitas novas opções terapêuticas.
Figura 8 : Nossos dispositivos permitem a detecção de atividade neuronal generalizada, distribuída por várias áreas do cérebro e camadas corticais. Esquerda: os locais de injeção (círculos coloridos) são indicados na imagem do cérebro dos roedores. [35] Direita: rasterização de 1020 canais gravados simultaneamente, classificados por fluxos (a cor corresponde ao ponto de inserção). Barra lateral: uma imagem ampliada de picos de um segmento. Este fio corresponde ao mostrado na fig. 7)A modulação da atividade neuronal será uma parte importante das interfaces clínicas cérebro-máquina de última geração [39], por exemplo, para fornecer uma sensação de toque ou propriocepção para o controle dos movimentos neoprotéticos [40, 41]. Portanto, desenvolvemos o ASIC Neuralink, capaz de estimulação elétrica em cada canal, embora não tenhamos demonstrado essas capacidades aqui.Este sistema NQI tem várias vantagens sobre as abordagens anteriores. O tamanho e a composição das sondas de filme fino são mais adequados às propriedades do material do tecido cerebral do que as sondas de silício comumente usadas e, portanto, podem exibir biocompatibilidade aumentada [28, 21]. Além disso, a capacidade de escolher onde inserir nossas sondas, inclusive nas estruturas subcorticais, nos permite criar nossas próprias geometrias de matrizes para atingir determinadas áreas do cérebro sem danificar as redes vasculares. Esse recurso é importante para a criação de um NKI de alto desempenho, pois a distribuição de eletrodos pode ser ajustada dependendo dos requisitos da tarefa. FinalmenteA miniaturização e o design do Neuralink ASIC oferecem grande flexibilidade no design do sistema e suportam um número muito alto de canais com um tamanho prático e baixo consumo de energia.Basicamente, nossa abordagem às interfaces cérebro-máquina é extensível e escalável. Aqui, relatamos a gravação simultânea de banda larga de mais de 3.000 eletrodos inseridos em um rato que se move livremente. Em um cérebro maior, vários dispositivos com essa arquitetura podem ser facilmente implantados e, portanto, poderíamos interagir com um número muito maior de neurônios sem uma reengenharia séria. O desenvolvimento adicional da robótica cirúrgica pode nos permitir alcançar isso da mesma maneira, sem aumentar significativamente o tempo da cirurgia.Antes de um dispositivo com alta largura de banda se tornar adequado para uso clínico, será necessário resolver vários problemas tecnológicos sérios, mas agora é fácil imaginar que esse dispositivo permita que pacientes com lesões na medula espinhal controlem inteligentemente um mouse e teclado digitais. E em combinação com os métodos de estimulação da medula espinhal que melhoram rapidamente [42], no futuro essa abordagem poderá restaurar a função motora. As interfaces neurais de alto rendimento devem fornecer muitas novas opções terapêuticas.7. Agradecimentos
Gostaríamos de agradecer ao Laboratório Nacional Livermore. Lawrence (LLNL), Laboratório de Nanotecnologia Berkeley Marvell, Centro de Pesquisa Sem Fio Berkeley (BWRC), Centro de Nanotecnologia Stanford e ex-funcionários atuais e atuais da Neuralink por suas contribuições ao trabalho descrito aqui.8. vídeos adicionais
Vídeo 1 : Uma série de seis inserções de um robô neurocirúrgico em uma imitação de agarose de tecido cerebral. A captura de linha por uma agulha ocorre fora do quadro. Alterações na cor de fundo são causadas pela iluminação em diferentes frequências de luz em diferentes estágios do processo de curativo e inserção. Um segmento foi inserido antes do início do vídeo. Vídeo .Vídeo 2 : Visualização tridimensional do processo de implantação de roscas (mesmos dados da Fig. 8). A inserção de linha é visualizada na mesma ordem que na operação real, mas no modo de reprodução rápida. O tamanho da rosca e a profundidade de inserção são típicos. As coordenadas estereotáxicas de cada inserção são apresentadas em um conjunto de dados fornecido por Calabrese e colaboradores [35]. Vídeo .9. Fontes[1] Leigh R. Hochberg et al. "Controle do conjunto neuronal de dispositivos protéticos por um ser humano com tetraplegia." In: Nature 442 (2006), p. 164. issn: 1476-4687.
[2] Wei Wang et al. "Uma interface eletrocorticográfica do cérebro em um indivíduo com tetraplegia". In: PLoS ONE 8 (2013), e55344.
[3] Tyson Aflalo et al. "Decodificando imagens motoras do córtex parietal posterior de um ser humano tetraplégico." In: Science 348 (2015), pp. 906-910. issn: 0036-8075.
[4] Leigh R. Hochberg et al. "Alcance e alcance por pessoas com tetraplegia usando um braço robótico controlado neuralmente." In: Nature 485 (2012), p. 372. issn: 1476-4687.
[5] Jennifer L. Collinger et al. "Controle neuroprosthetic de alto desempenho por um indivíduo com tetraplegia." In: The Lancet 381 (2013), pp. 557-564. issn: 0140-6736.
[6] Gopala K. Anumanchipalli, Josh Chartier e Edward F. Chang. "Síntese da fala a partir da decodificação neural de frases faladas." In: Nature 568 (2019), pp. 493-498. issn: 0028-0836.
[7] György Buzsáki, Costas A. Anastassiou e Christof Koch. "A origem dos campos e correntes extracelulares - EEG, ECoG, LFP e picos". In: Nature Reviews Neuroscience 13 (2012), p. 407. issn: 1471-0048.
[8] Bijan Pesaran et al. "Investigando a dinâmica cerebral em larga escala usando registros de potencial de campo: análise e interpretação." In: Nature Neuroscience 21 (2018), pp. 903-919. issn: 1097-6256.
[9] Taro Kaiju et al. “Gravação ECoG de alta resolução espaço-temporal de potenciais evocados somatossensitivos com matrizes flexíveis de microeletrodos.” In: Fronteiras em circuitos neurais 11 (2017), p. 20
[10] Rafael Yuste. "Da doutrina dos neurônios às redes neurais." In: Nature Reviews Neuroscience 16 (2015), pp. 487-497. Issn: 1471-003x.
[11] Guosong Hong e Charles M. Lieber. "Novas tecnologias de eletrodos para gravações neurais." In: Nature Reviews Neuroscience (2019), pp. 1-16. issn: 1471-003X.
[12] Edwin M. Maynard, Craig T. Nordhausen e Richard A. Normann. "A matriz intracortical de eletrodos de Utah: uma estrutura de gravação para possíveis interfaces cérebro-computador". In: Eletroencefalografia e Neurofisiologia Clínica 102.3 (1997), pp. 228-239. issn: 0013-4694.
[13] Miguel AL Nicolelis et al. "Gravações crônicas, multissite e multieletrodo em macacos". In: Proceedings of the National Academy of Sciences 100.19 (2003), pp. 11041-11046. issn: 0027-8424. eprint:
www . pnas.org/content/100/19/11041.full.pdf.
[14] KD Wise et al. "Microeletrodos, microeletrônica e microssistemas neurais implantáveis". In: Anais do IEEE 96.7 (2008), pp. 1184-1202. issn: 0018-9219.
[15] Nicholas M. Dotson et al. "Um sistema de gravação de microdrives semi-crônicos em larga escala para primatas não humanos". In: Neuron 96 (2017), 769-782.e2. issn: 0896-6273.
[16] James J. Jun et al. "Sondas de silício totalmente integradas para registro de alta densidade de atividade neural". In: Nature 551 (2017), p. 232. issn: 1476-4687.
[17] Gian Nicola Angotzi e col. “SiNAPS: uma sonda CMOS do Sensor de pixel ativo implantável para gravações neurais simultâneas em larga escala.” In: Biosensores e Bioeletrônica 126 (2018), pp. 355-364. issn: 0956-5663.
[18] Felix Deku et al. "Matrizes de ultramicroeletrodos de carboneto de silício amorfo para estimulação e gravação neurais". In: Journal of Neural Engineering 15.1 (2018), p. 016007.
[19] Aziliz Lecomte, Emeline Descamps e Christian Bergaud. "Uma revisão sobre considerações mecânicas para sondas neurais implantadas cronicamente". In: Journal of Neural Engineering 15 (2018), p. 031001. issn: 1741-2552.
[20] Dion Khodagholy et al. "NeuroGrid: registrando potenciais de ação da superfície do cérebro." In: Nature Neuroscience 18 (2014), pp. 310-315. issn: 1097-6256.
[21] Jason E. Chung et al. “Gravações eletrofisiológicas de alta densidade, longa duração e multirregionais usando matrizes de eletrodo de polímero.” In: Neuron 101 (2019), 21-31.e5. issn: 0896-6273.
[22] Stephan L. Chorover e Anne-Marie Deluca. "Um novo e doce eletrodo múltiplo para registro de unidade única crônica em animais em movimento" In: Physiology & Behavior 9 (1972), pp. 671-674. issn: 0031-9384.
[23] Jia Liu et al. “Eletrônica injetável em seringa”. In: Nature Nanotechnology 10 (2015), pp. 629-636. issn: 1748-3387.
[24] Tian-Ming Fu et al. "Mapeamento cerebral estável e crônico a longo prazo no nível de neurônio único". In: Nature Methods 13 (2016), pp. 875-882. issn: 1548-7091.
[25] Flavia Vitale et al. “Microativação fluídica de eletrodos flexíveis para gravação neural.” In: Nano Letters 18.1 (2018), pp. 326-335. eprint:
doi.org/10.1021/acs.nanolett.7b04184 .
[26] Lan Luan et al. “As sondas nanoeletrônicas ultraflexíveis formam uma integração neural confiável e sem cicatrizes da glia.” In: Science Advances 3 (2017), e1601966. issn: 2375-2548.
[27] Marc D. Ferro et al. "NeuroRoots, um dispositivo Brain Machine Interface sem inspiração de inspiração biológica para gravação a longo prazo." In: bioRxiv (2018), p. 460949.
[28] Timothy L. Hanson et al. "A" máquina de costura "para gravação neural minimamente invasiva". In: bioRxiv (2019). eprint:
www.biorxiv.org/content/early/2019/03/14/578542.full.pdf .
[29] Kip A Ludwig et al. "Registros neurais crônicos usando microeletrodos de silício depositados eletroquimicamente com um filme de poli (3,4-etilenodioxitiofeno) (PEDOT)". In: Journal of Neural Engineering 3 (2006), p. 59. issn: 1741-2552.
[30] Seth J. Wilks et al. "Poli (3,4-etilenodioxitiofeno) como um material de interface micro-neural para eletroestimulação." In: Frontiers in Neuroengineering 2 (2009), p. 7. issn: 1662-6443.
[31] JD Klein, SL Clauson e SF Cogan. "Morfologia e capacidade de carga de filmes de óxido de irídio pulverizados". In: Journal of Vacuum Science & Technology A: Vácuo, Superfícies e Filmes 7 (1989), pp. 3043-3047. issn: 0734-2101.
[32] SF Cogan, TD Plante e J. Ehrlich. "Filmes de óxido de irídio pulverizados (SIROFs) para estimulação neural de baixa impedância e eletrodos de gravação." In: A 26a Conferência Internacional Anual da IEEE Engenharia em Medicina e Biologia Society 2 (2004), pp. 4153-4156.
[33] Tarun Saxena et al. "O impacto do sangue crônico - quebra da barreira cerebral na função intracortical do eletrodo". In: Biomateriais 34 (2013), pp. 4703-4713. issn: 0142-9612.
[34] Joshua H. Siegle et al. “Open Ephys: uma plataforma de código-fonte aberto, baseada em plugins, para eletrofisiologia multicanal.” In: J. Neural Eng. 14 (2017), pp. 1–13.
[35] E. Calabrese et al. "Um atlas quantitativo de histologia da ressonância magnética do desenvolvimento pós-natal do cérebro de rato com estimativas regionais de crescimento e variabilidade". In: NeuroImage 71 (2013), pp. 196–201.
[36] Sonia Todorova et al. "Classificar ou não classificar: o impacto da triagem no desempenho da decodificação neural". In: Journal of Neural Engineering 11 (2014), p. 056005. issn: 1741-2552.
[37] Breanne P. Christie et al. "Comparação da classificação de pico e limiar de formas de onda de tensão para desempenho intracortical da interface cérebro-máquina." In: Journal of Neural Engineering 12 (2015), p. 016009. issn: 1741-2552.
[38] Eric M. Trautmann et al. "Estimativa precisa da dinâmica da população neural sem classificação de pico." Em: Neurônio (2019). issn: 0896-6273.
[39] Andy Zhou et al. "Um dispositivo de neuromodulação de 128 canais sem fio e sem artefatos para estimulação e gravação em loop fechado em primatas não humanos". In: Nature Biomedical Engineering 3 (2019), pp. 15-26.
[40] Joseph E O'Doherty et al. "Exploração tátil ativa usando uma interface cérebro-máquina-cérebro". In: Nature 479 (2011). issn: 1476-4687.
[41] Sharlene N. Flesher et al. "A sensação tátil restaurada melhora o controle do braço neuroprosthetic." In: bioRxiv (2019), p. 653428.
[42] Fabien B. Wagner et al. "A neurotecnologia direcionada restaura a caminhada em humanos com lesão medular". In: Nature 563 (2018), pp. 65-71. issn: 0028-0836.