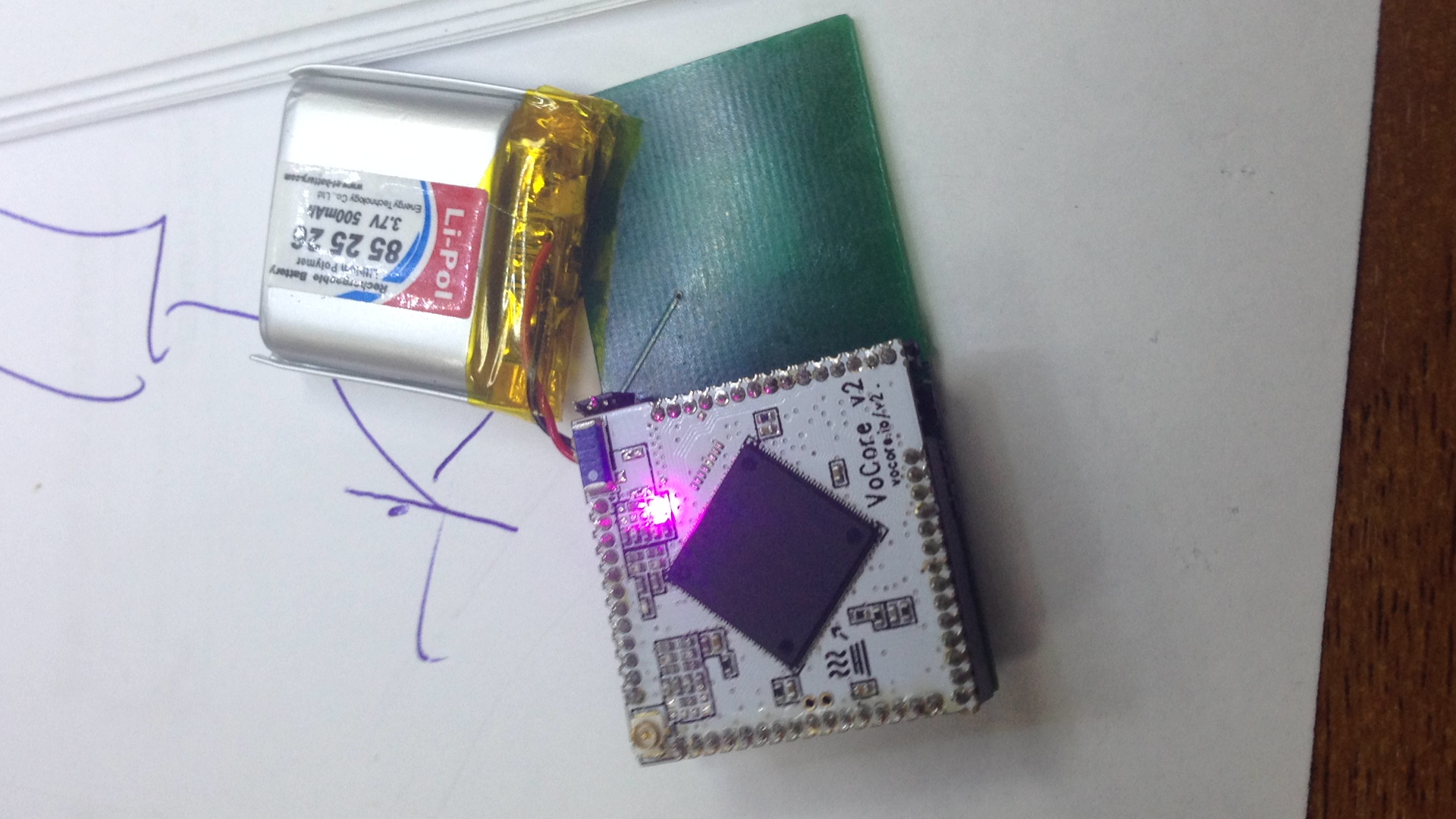
"Um dia ruim na pesca é melhor do que um bom dia no trabalho." Há um grande número de alarmes de mordida eletrônica. Minha versão se destaca pela presença de WiFi com um aplicativo WEB, um acelerômetro e carregamento sem fio, classe de proteção IP68. O cérebro do dispositivo é o menor computador Linux
Vocore2 , acelerômetro
MPU6050 , carregamento de Qi baseado no
BQ51050BRHLT . As fontes podem ser baixadas aqui no
Github .
Especificações FishSensor:
- Sistema operacional OpenWrt 15.05.1 "Chaos Calmer";
- Conexão Wi-Fi com dispositivos móveis;
- alcance de comunicação 30-50 m;
- controle de mordida - som (apenas Android), visual;
- configuração remota de sensibilidade, melodia, volume;
- Internet é opcional;
- 3 horas de duração da bateria (bateria LiPo 500mAH)
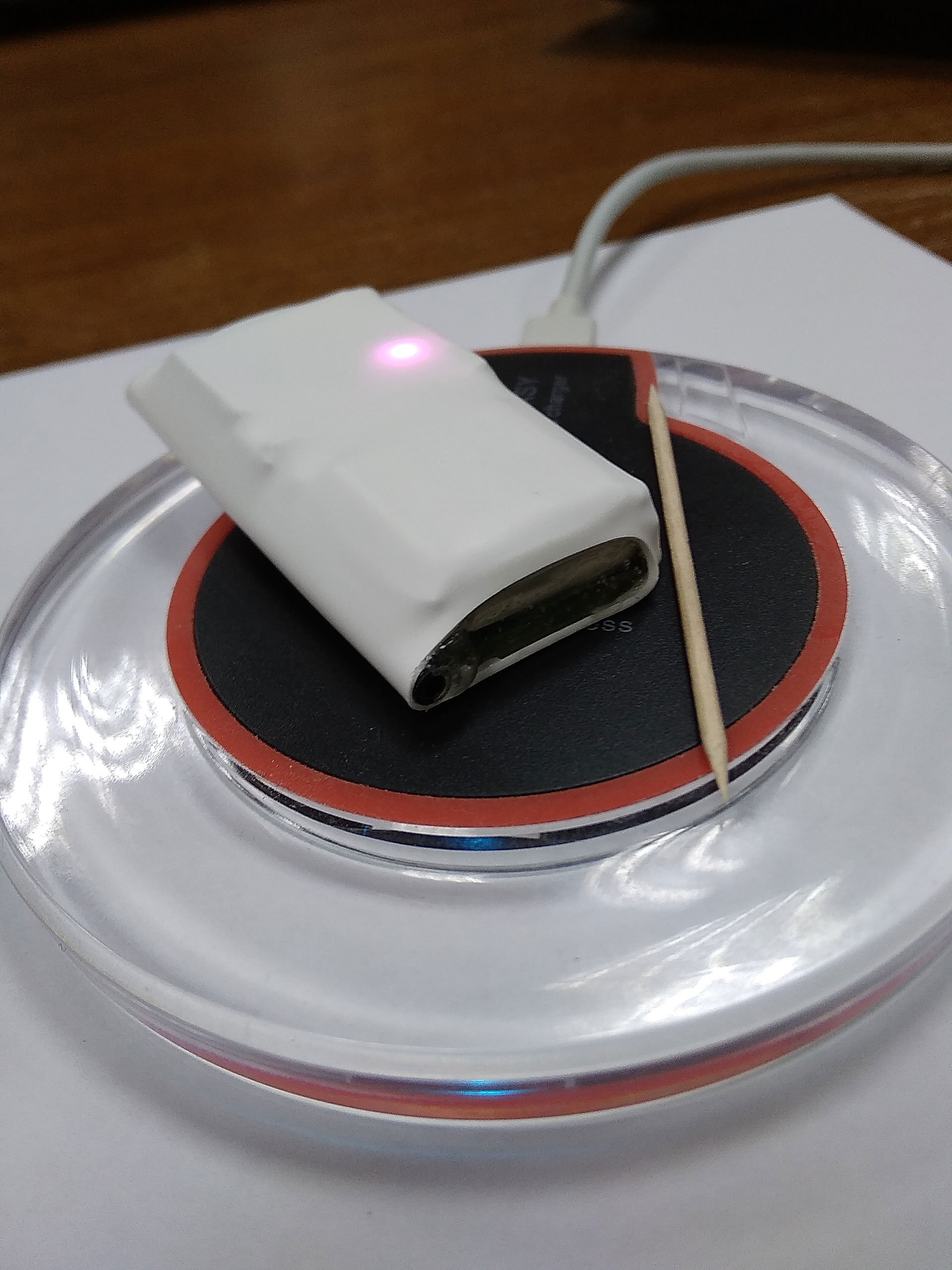
- carregamento Qi sem fio (até 1,5 horas)
- classe de proteção IP68;
- dimensões totais 60 x 30 x 11 mm;
- peso 22 g
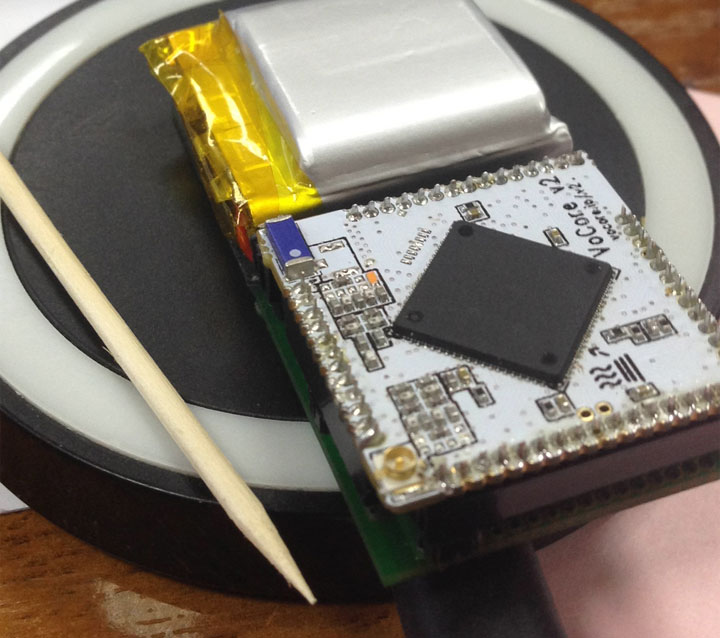
O dispositivo é estruturalmente uma placa na qual a antena do receptor e o driver de carregamento Qi
BQ51050BRHLT , acelerômetro
MPU6050 , conector
Vocore2 e bateria estão localizados. Proteção contra poeira e umidade devido ao tubo termo-retrátil, preenchido com o composto de silicone Rexant PK-68 nas extremidades. Puxe o cabo de pesca através de um tubo de plástico com um diâmetro interno de 2 mm.
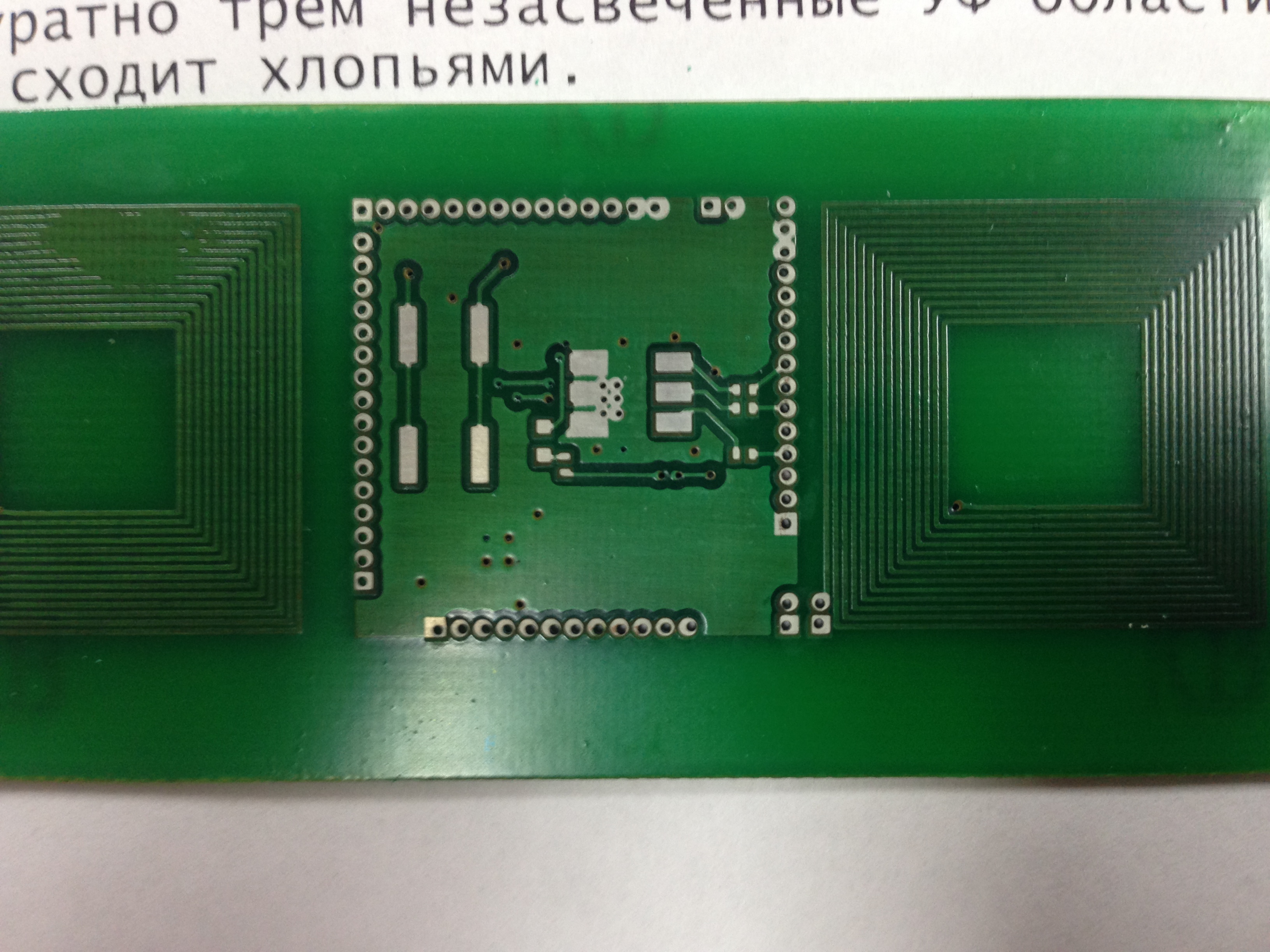
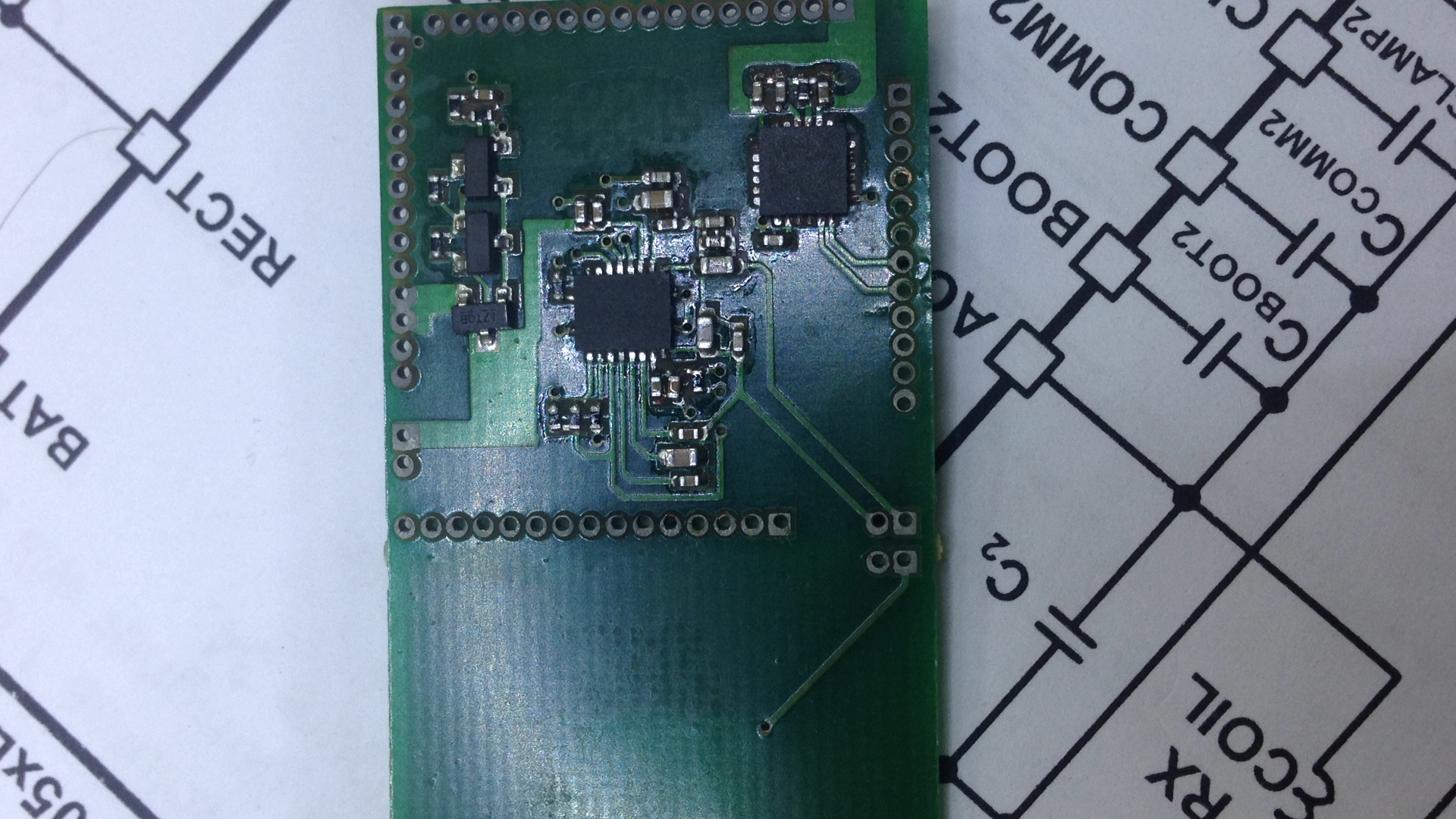
Fabricação de PCB
A questão era nítida se seria possível fazer uma bobina de indutância de receptor de Qi com um tamanho de 25 x 25 mm, 14 voltas, espessura da esteira de 0,3 mm, uma folga de 0,2 mm e qual seria a indutância real da bobina. Os dados calculados foram confirmados e deram uma indutância de 4 μH.


Elementos de solda
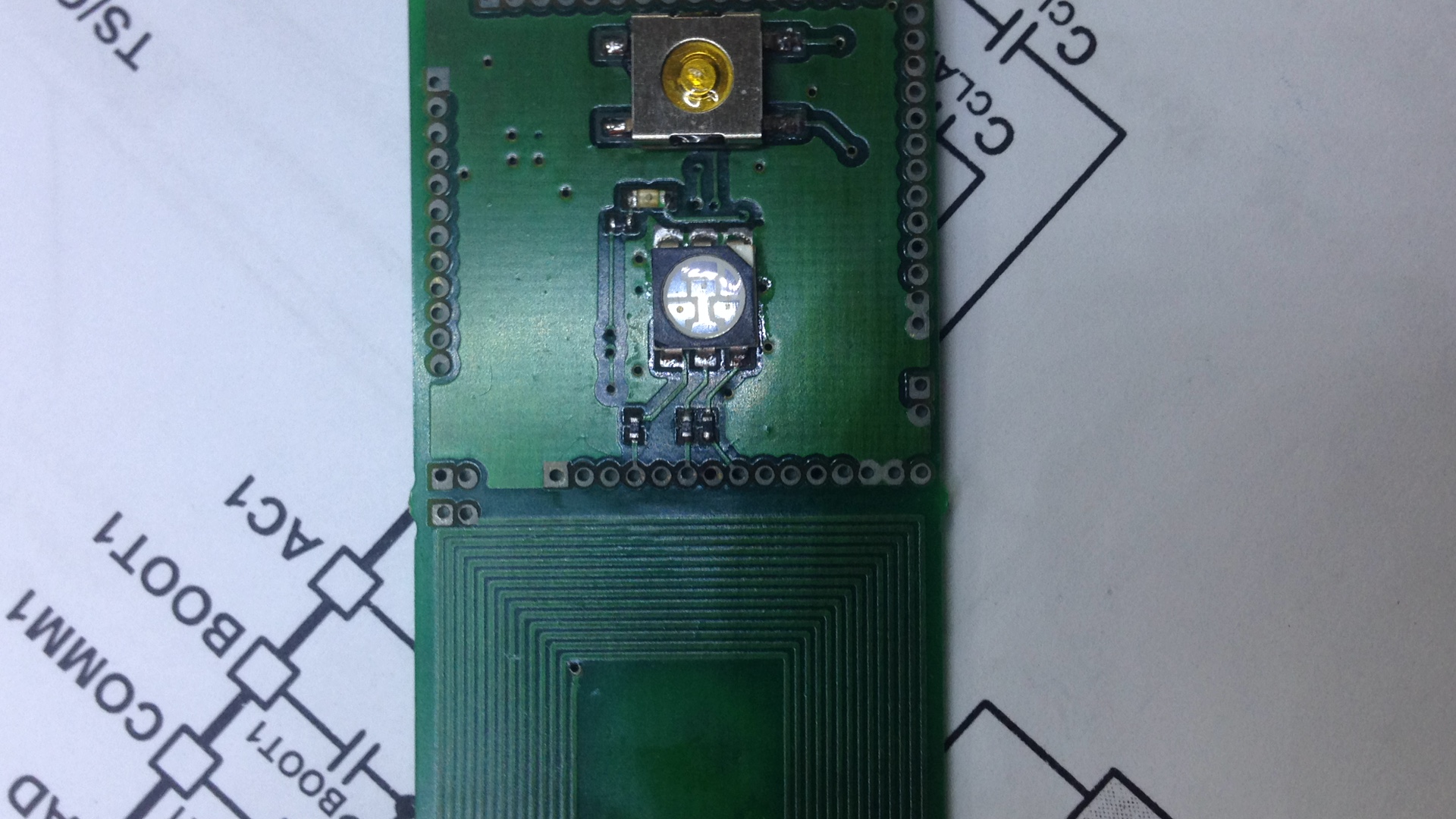
Configuração de carga Qi
Um ponto interessante foi o ajuste da ressonância do circuito oscilatório. Recomendações e fórmulas de cálculo da folha de dados no
BQ51050BRHLT foram confirmadas. Indutância 4 µH, indutância com blindagem de ferrite 7 µH, capacitor em paralelo 6,5 nF, capacitor em série com bobina 422 nf. O fator de qualidade do circuito acabou sendo muito baixo 22 devido à grande resistência da bobina de 1,7 Ohms (um fator de qualidade superior a 500 foi recomendado por uma folha de dados). No entanto, tudo funcionou perfeitamente, ressonância estável a uma distância de 10 mm da bobina do transmissor.

Erro de cálculo construtivo - o indicador de carga está localizado na lateral da antena, ou seja, não é visível quando o FishSensor está no transmissor do carregador. Mas o processo de carregamento é visível no indicador do próprio transmissor Qi.
Configuração do acelerômetro
De software
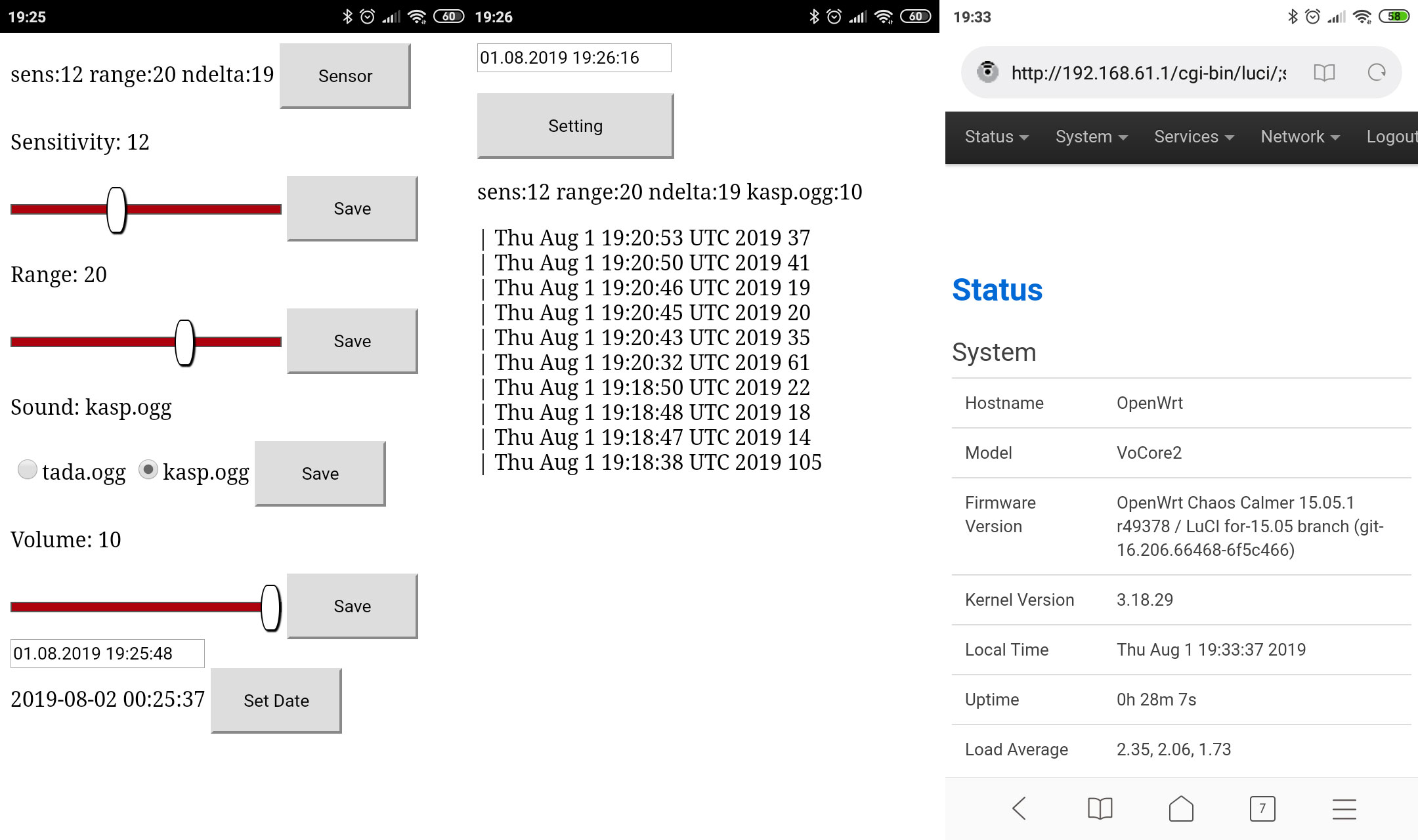
O Vocore2 integrado da fábrica instalou o OC OpenWrt 15/05/115 “Chaos Calmer”. O dispositivo é acessível via WiFi através de um navegador, graças ao Luci pré-instalado. Usamos o modo de ponto de acesso AP.
Instalou o pacote
php5 e todas as bibliotecas necessárias para formar a interface da web. Instalou um pacote para
MPU6050 a partir de
leon0516 . Na inicialização, coloquei os arquivos de
execução automática do driver MPU6050 e meu script gravado no
bash 6050.sh. O driver MPU6050 gera um arquivo de texto das leituras do acelerômetro /tmp/mpu6050.txt. O 6050.sh analisa apenas alterações no eixo Z no arquivo /tmp/mpu6050.txt e grava seu log em /www/mess.log. As páginas de
configuração e exibição são escritas em php.
Conectamos o smartphone ao FishSensor como um ponto de acesso. Instale na área de trabalho a partir do navegador como um aplicativo da Web. Para o Android, nas configurações do navegador, ativamos a reprodução automática de arquivos de áudio (no iOs, essa simulação é proibida por uma política de segurança).
Enfrentou o problema de armazenar em cache os dados gravados em um arquivo de texto pelo sistema operacional OpenWrt. As leituras do acelerômetro são gravadas em um arquivo quando o cache da memória está cheio, às vezes os atrasos chegam a 1 segundo. Um patch existente para desativar o cache de arquivos está quebrado. Eu pensei que para a minha tarefa isso não é muito relevante e decidi deixar o problema até tempos melhores.
Demo
Testes em larga escala ainda não foram realizados, eles estão planejados para este mês.
PS O desenvolvimento da idéia pode ser uma chave de fenda sem fio com um Vocore instalado para engatar a engrenagem no momento da mordida. No desenvolvimento máximo, o serviço Yandex.Fishing.