
Nos últimos anos, eu queria colocar um brinquedo no painel de controle e sempre com um vídeo. Mas não compre pronto, mas faça você mesmo. E, no final, eu pedi um brinquedo assim, com um sistema de controle simples, mas com grande potencial de modernização. Demorou cerca de 9 meses para concluir todo o trabalho, do começo ao fim. Durante a maior parte desse tempo, os componentes da China estavam aguardando.
Estou escrevendo um artigo para a maior parte de mim, para que no futuro não esqueça o que fiz, como, por que e por que.
Ele conterá duas partes principais: hardware e software, e possivelmente outra parte sobre o layout do ferro. Primeiro, descreverei o hardware, do qual coletei, quais problemas encontrei e como os resolvi.
1. Hardware
O sistema consiste em um painel de controle e equipamento instalado em uma máquina de escrever. Vamos considerá-los com mais detalhes.
1.1 Painel de controle
Componentes
Chapéu de jogo
O jogo HAT foi selecionado porque Esta é uma solução pronta para uso que combina tela, joystick e teclado suficientes para controlar a máquina.

O joystick nesta placa é KY-023. Ele decidiu usar em vez do volante. Mas o Raspberry não possui um ADC e os únicos valores que podem ser obtidos com ele são 0 e 1, o que claramente não é suficiente para uma rotação suave das rodas.

ADS1115
Este problema foi resolvido pelo módulo ADS1115.
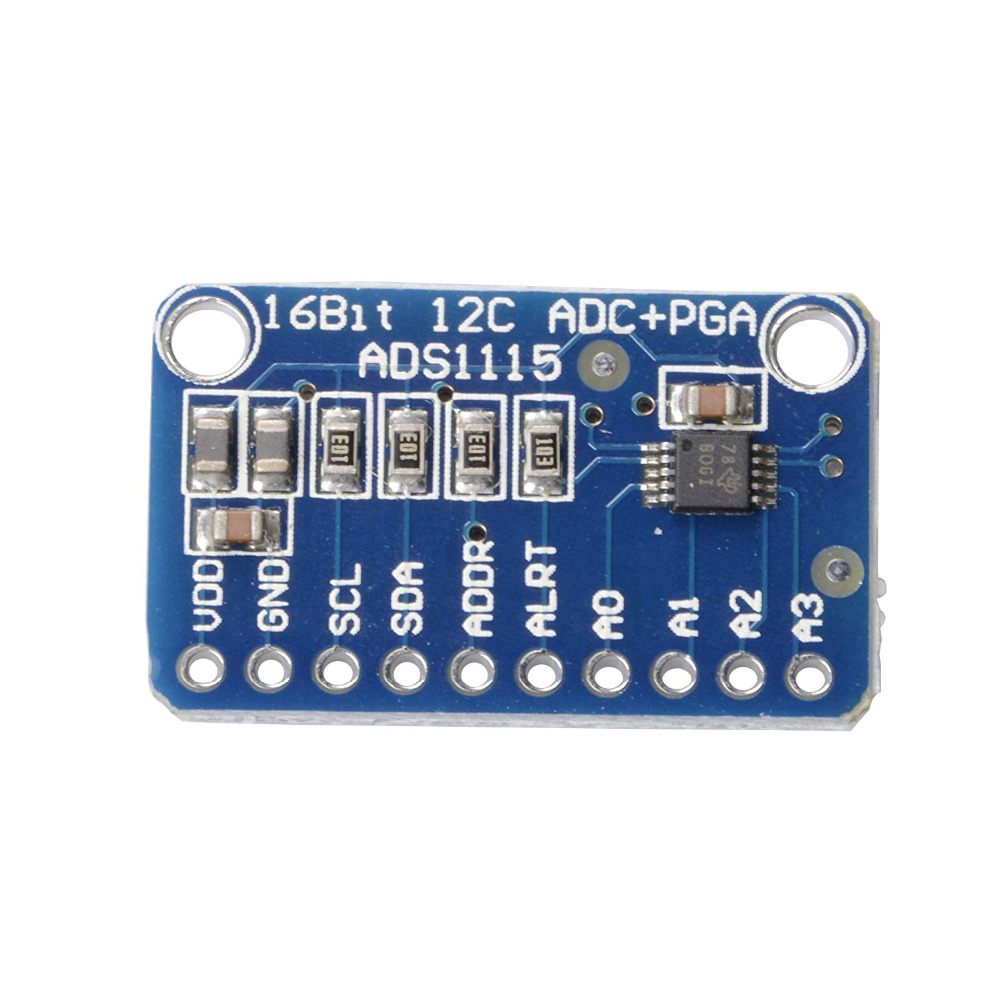
O módulo foi soldado ao Game HAT e anexado a ele usando fita 3M. As leituras são obtidas das pernas do meio dos resistores variáveis no joystick. É assim:

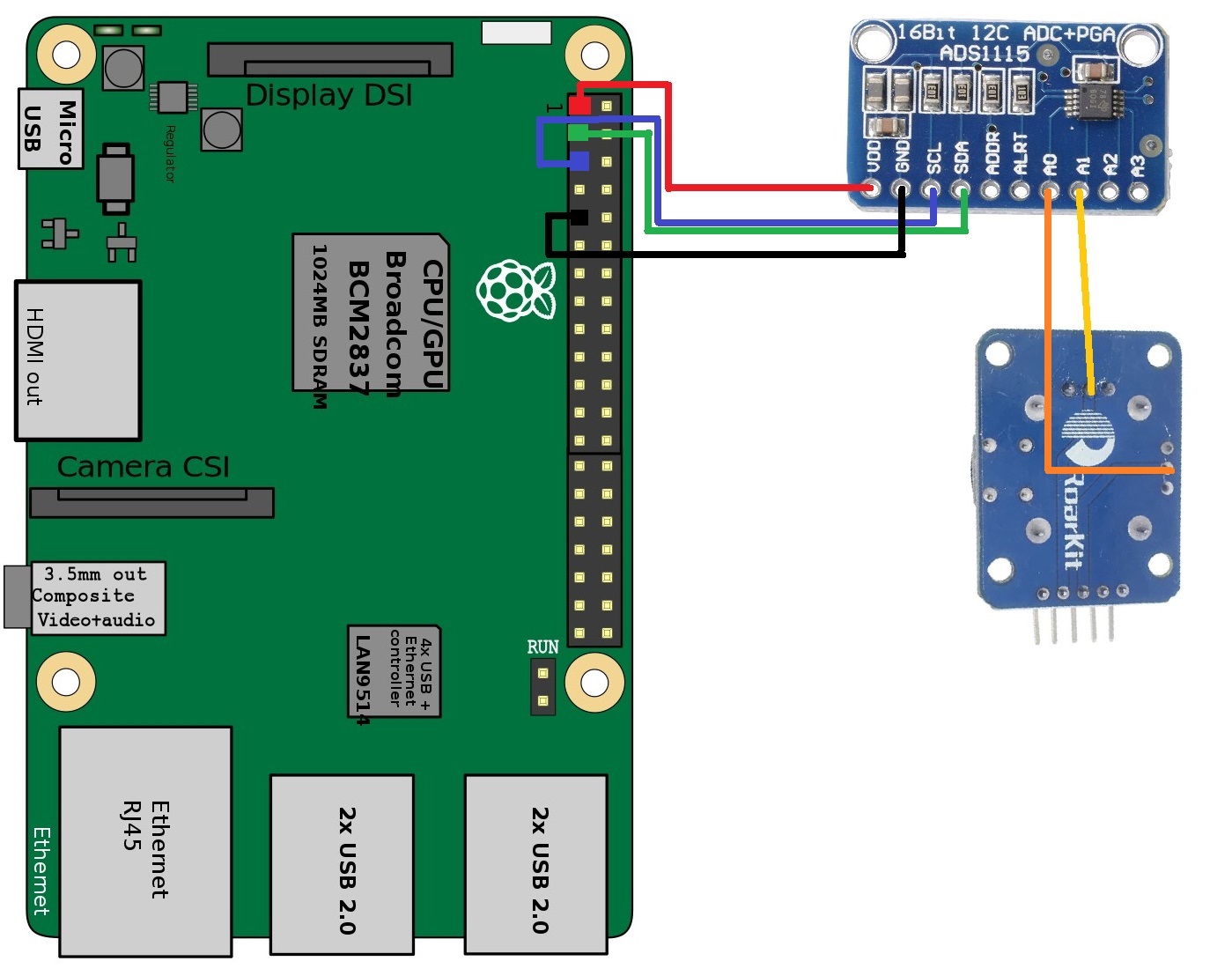
O joystick também é soldado no HAT do jogo. Os fios são soldados aos conectores Game HAT, que correspondem aos conectores de energia e I2C do Raspberry. Diagrama de fiação:
Isso completa a coleção de hardware do painel de controle. Externamente, ele não sofreu nenhuma alteração visível.
1.2 Máquina
Como tudo parece horrível sob o capô:
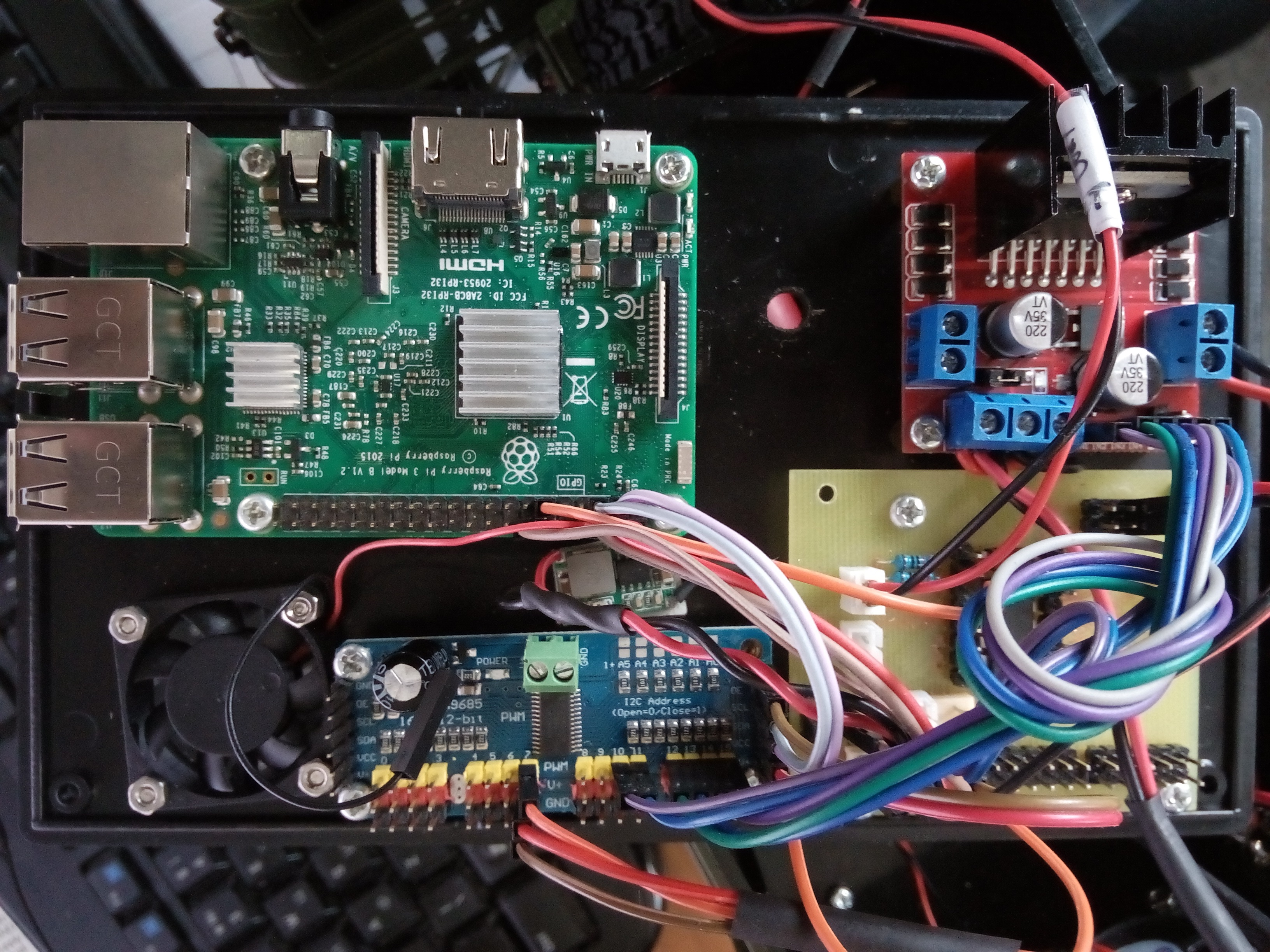
Vamos acertar.
Componentes
- Raspberry pi 3
- Câmera Raspberry Pi v2 NoIR
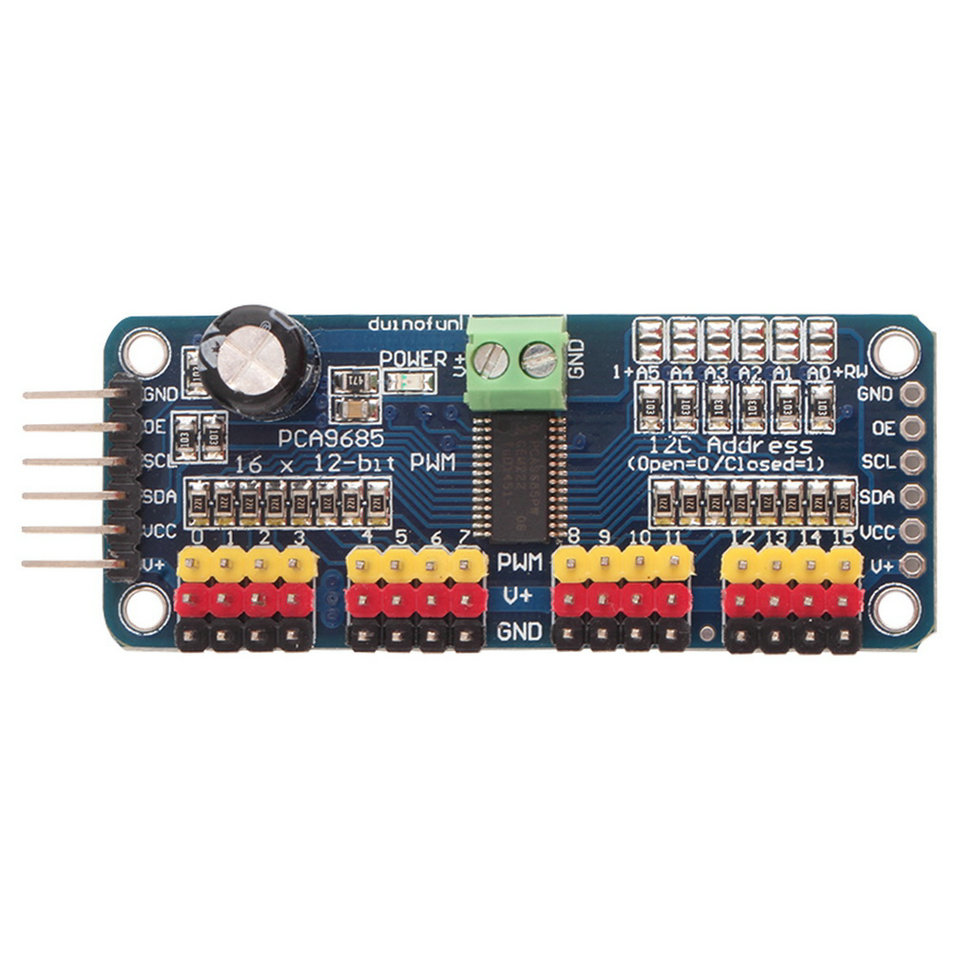
- Gerador PCA9685 PWM
- Conversor de potência step-down Mini-360
- Controlador de carregamento BMS CF-4S30A-A
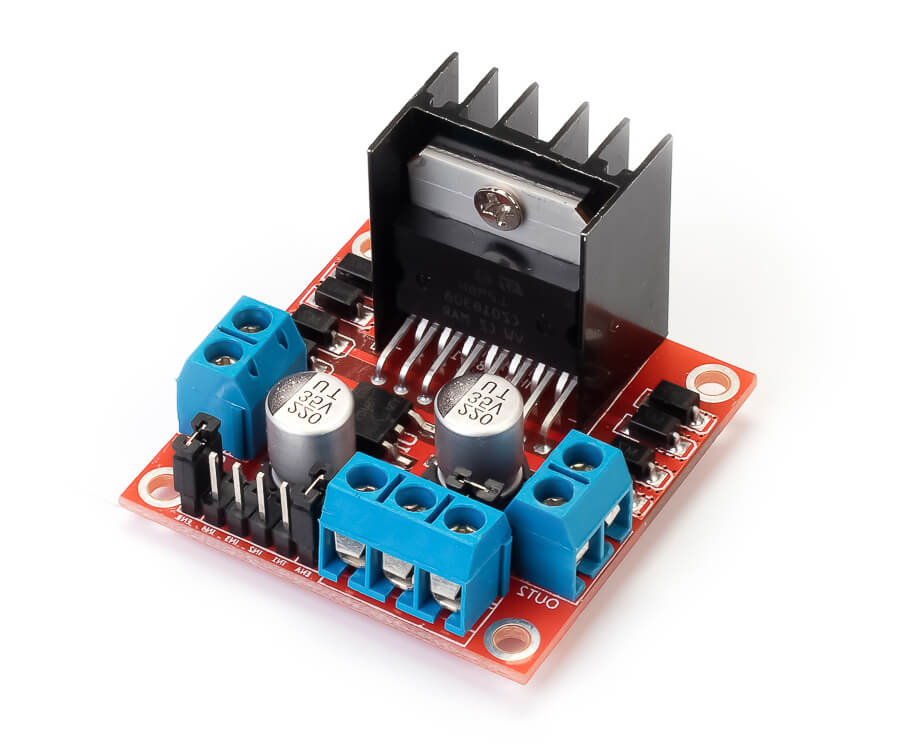
- Driver de controle do motor L298N
- Meu painel de controle de luz baseado no driver L293
- 3 baterias de íon de lítio 18650
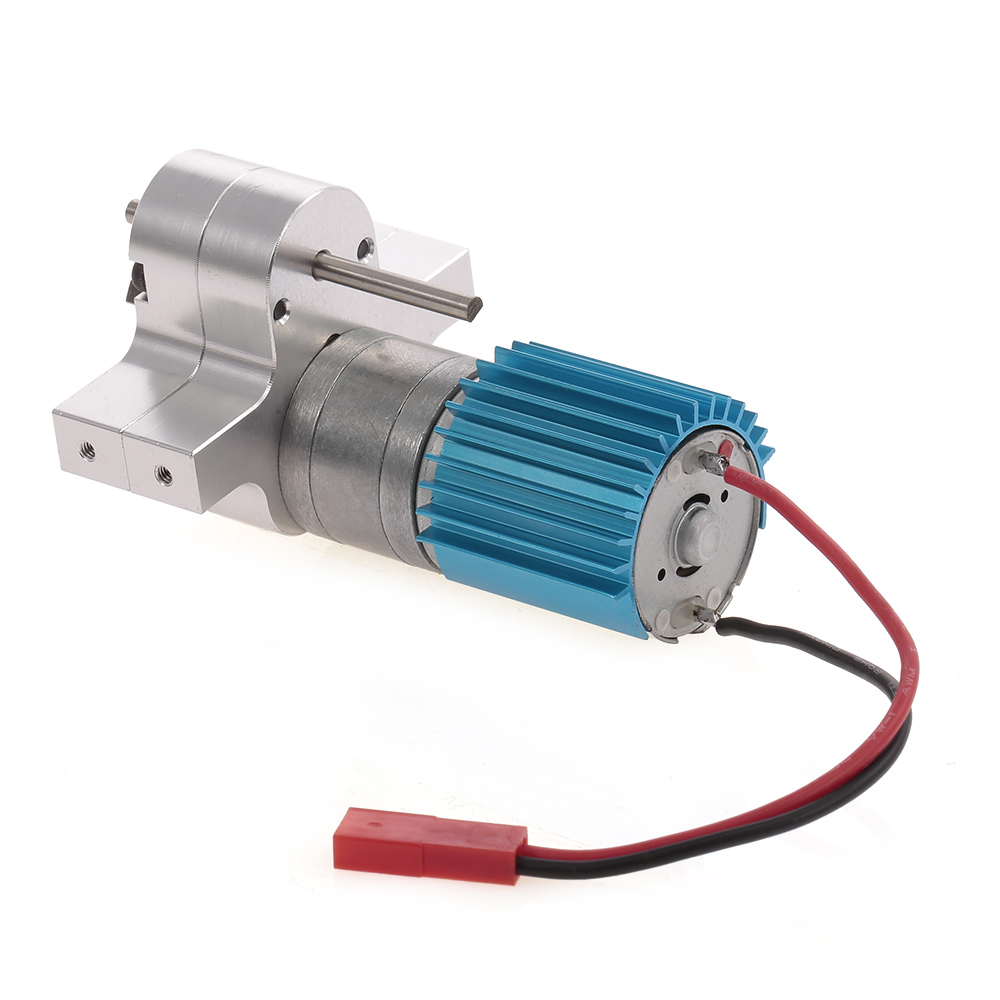
- 370 motor
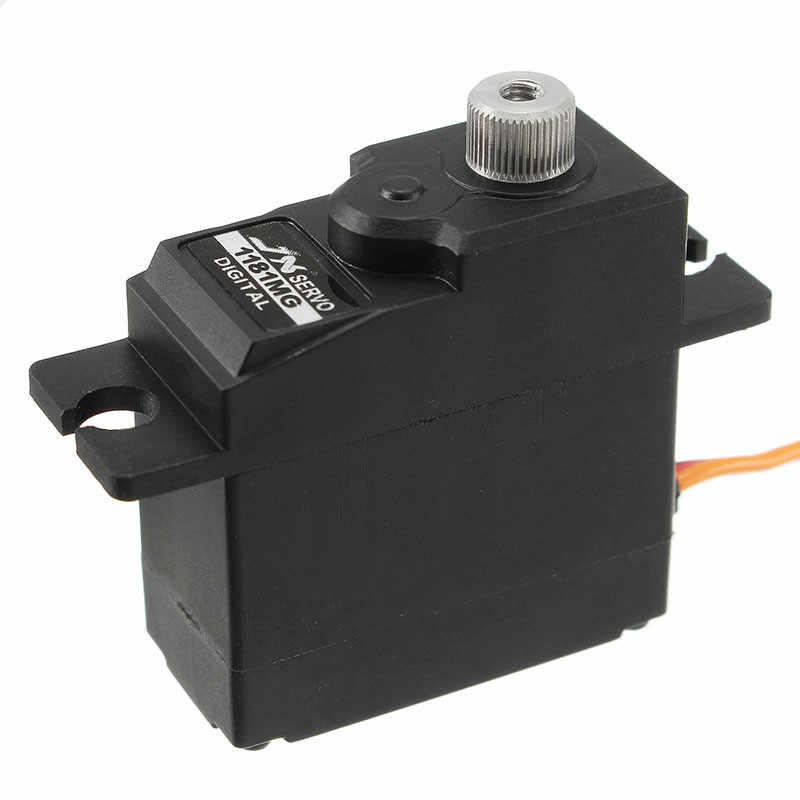
- Servo DI-1181MG
Nutrição
Vamos começar pela fonte de alimentação, que é fornecida por três baterias 18650 conectadas em série e com ~ 12 volts.
As baterias são conectadas através da placa BMS CF-4S30A-A para que possam ser carregadas e não descarregadas a zero no pokatushki.
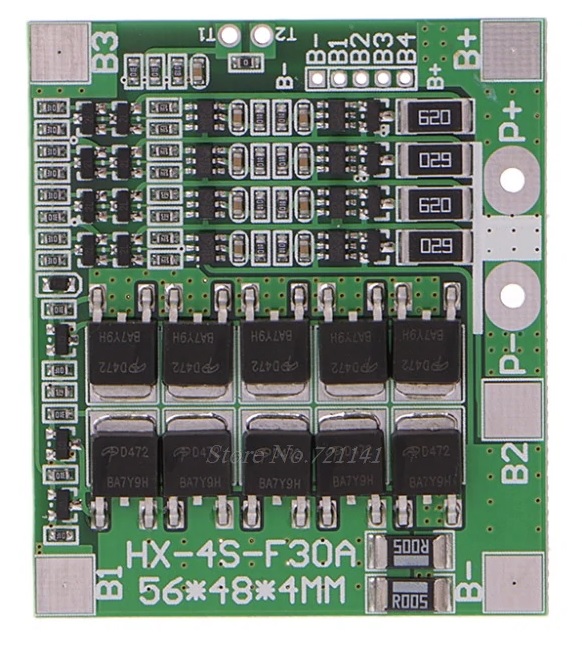
Mas esta placa foi projetada para 4 baterias, por isso foi refeita para trabalhar com 3 baterias. Por que ela foi levada, e não 3S 40A BMS. Porque ela estava na mão.
Esquema de alteração:

Essa tensão alimenta o motor 370 através do driver L298N.
Para alimentar o Raspberry, a tensão das mesmas baterias é usada, mas a tensão é reduzida pelo módulo Mini-360 para 5 volts.

Framboesa posta nas pernas.
Movimento
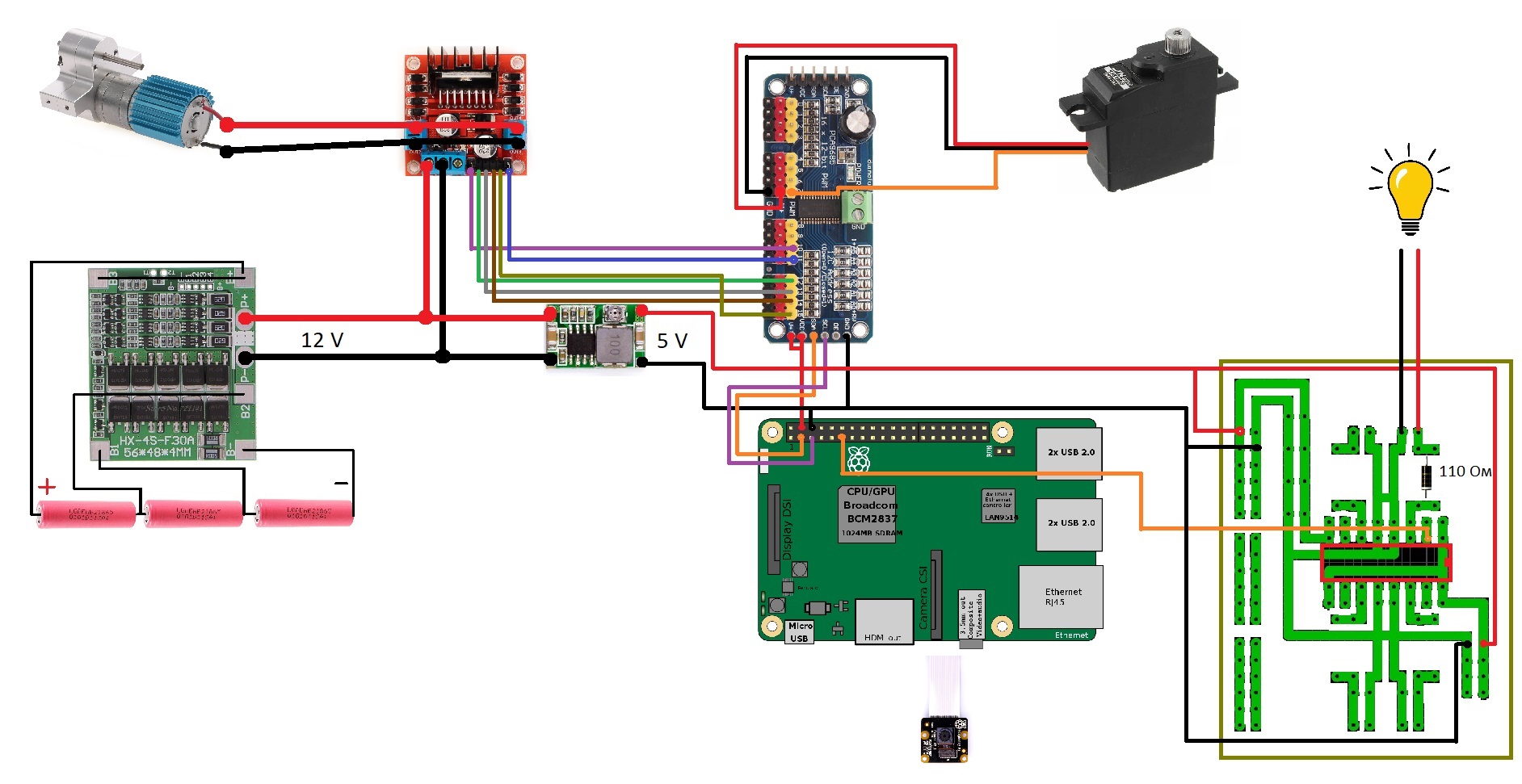
Agora vamos falar sobre como o carro dirige. Para controlar o mecanismo de direção, é utilizado um servoconversor DI-1181MG, que é controlado usando o PCA9685. O PCA9685 também é responsável por controlar o motor, ajustando sua velocidade e direção de rotação através do driver L298N. O Raspberry também controla o PCA9685 no barramento I2C. O PCA9685 é alimentado por 5 volts com um conversor buck. Isso é suficiente para servos e controle do motor. O motor está conectado a duas saídas L298N para aumentar a potência.
Vídeo
Para o vídeo que usei o Camera v2 NoIR, ele se conecta facilmente ao Raspberry. Mas houve algumas melhorias. O loop padrão da câmera tinha 15 cm de comprimento, o que não era suficiente para o trabalho de instalação. Este loop também não é padrão, possui 15 pinos. No AliExpress, para um loop longo para esta câmera, os chineses querem mais de 1000 rublos. Portanto, foi adquirido um conjunto de 10 presilhas padrão de 16 pinos ~ para 300 rublos. E com a ajuda da tecnologia de alta tecnologia para o uso de tesouras de escritório, foi refeito um cabo de 15 pinos para a câmera.
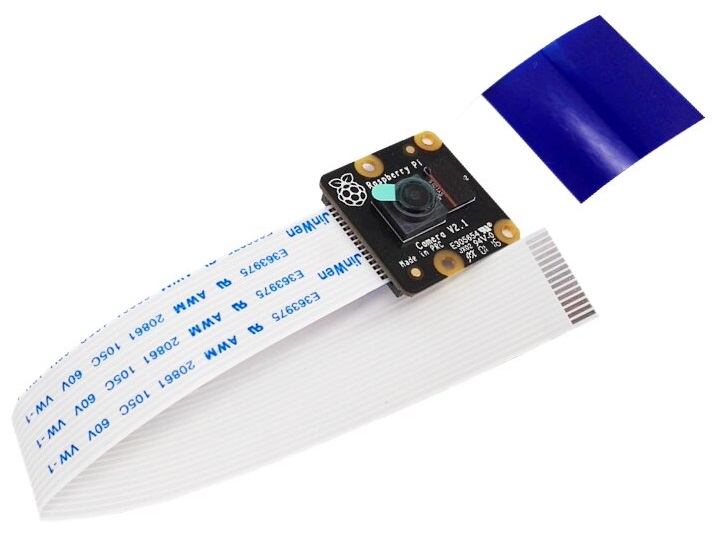

No momento em que escrevo, no segundo mês, estou aguardando a montagem da câmera na cabine. Até agora, a máquina mostra apenas o teto)
A luz
A máquina já instalou luz regular, composta por faróis com 2 LEDs amarelos. Resta apenas alimentá-los.
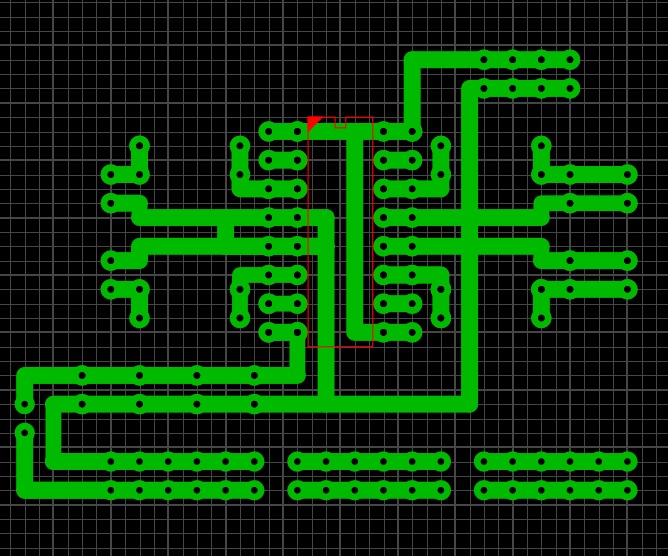
A luz é controlada através da minha placa, que é baseada no driver L293. A energia dos diodos é fornecida através de um resistor. A placa é feita usando a tecnologia LUT. Ele também possui várias faixas para a fiação elétrica.
Seria possível usar o PCA9685 para controlar a luz; no momento em que eu estava fazendo sozinho, eu não conhecia o PCA9685 e poderia ficar sem ele.
Placa de circuito:
Vou apresentar o diagrama de conexão geral:
Mas é isso que estava na máquina de escrever até eu subir))

Quando escrevi, eu já tinha começado a esquecer o que estava fazendo e como. Embora não tenha passado mais de um mês desde a montagem.
Tudo está em hardware. No meu próximo artigo, descreverei a parte do software como ferro animado.
Gratidão
Meus colegas de trabalho: Andrei e Nikolai pela ajuda com ferro, Anton e Eugene pela ajuda no vídeo. Samodelkin-22 por LUT do meu painel. E Murzik.
Referências
Parte 2
Parte 3