
Por milhares de anos, a humanidade procurou o céu, querendo se tornar como pássaros. Muitas grandes mentes, de Leonardo da Vinci aos irmãos Wright, projetaram uma grande variedade de aeronaves, algumas das quais permaneceram no papel, enquanto outras se tornaram progenitoras de aviões e helicópteros modernos. Agora, voar para uma pessoa não é difícil - eu comprei uma passagem de avião e pronto. A maioria de nós nem pensa em como funciona esse enorme pássaro metálico que pode nos transferir de um continente para outro. A verdade entre aviões modernos e pássaros reais não é muito comum, mas com o desenvolvimento de robôs autônomos, a situação é um pouco diferente. Muitos cientistas estão tentando criar um pássaro-robô e, para que essa iniciativa seja bem-sucedida, é necessário entender não apenas como os pássaros voam, mas também como pousar. Hoje, encontraremos um estudo em que os graduados da Universidade de Stanford estudaram em detalhes o mecanismo para plantar um papagaio chamado Gary e seus parentes. Como os pássaros pousam, como eles entendem que podem ou não pousar em uma determinada superfície e qual é a cinemática de seus membros durante o pouso? Encontraremos respostas para essas e outras perguntas no relatório dos pesquisadores. Vamos lá
Base de estudo
Qual é a diferença entre aeronaves modernas e aves em termos de pouso? O Boeing 777, por exemplo, precisa de uma pista com um comprimento de pelo menos 2500 m, um helicóptero precisa de uma superfície plana (de preferência), como helicópteros. Os pássaros, por sua vez, não são limitados na geometria da tela de plantio e podem pousar em quase qualquer superfície (se considerarmos os pássaros como um todo, em vez de uma única espécie). Se falamos de robôs autônomos, suas capacidades em termos de pouso são muito limitadas. Alguns deles podem pousar com sucesso em superfícies especialmente projetadas, mas isso não pode ser comparado com um pica-pau comum, que pode pousar em superfícies verticais, inclinadas e horizontais, desde que haja garras nas quais se agarrar.
 É conveniente para mim (pica-pau-formiga / Melanerpes formicivorus).
É conveniente para mim (pica-pau-formiga / Melanerpes formicivorus).Os pesquisadores observam que seus antecessores já realizaram alguns estudos que quantificaram a dinâmica das pernas e asas das aves durante o plantio. No entanto, ainda não está claro como essa dinâmica muda, dependendo dos diferentes tipos de superfícies que servem como local de pouso. Afinal, não apenas a geometria da área de pouso é importante, mas também a textura da superfície.
Também é interessante que estudos anteriores não tenham sido realizados em aves vivas, portanto, na prática, não foi possível avaliar completamente a força de preensão das patas e garras. É por isso que algumas perguntas permaneceram sem resposta: como exatamente as aves entendem que o local de pouso é adequado; qual é a dinâmica dos membros no momento de tocar e agarrar; por que os pássaros que pousam em uma variedade de superfícies é uma questão insignificante, etc.
No trabalho que estamos considerando hoje, os pesquisadores decidiram testar os mecanismos e a dinâmica do desembarque de pássaros de árvores, observando os papagaios de Lesson (
Forpus coelestis ).
 Budgie da lição.
Budgie da lição.Os sujeitos pousaram voluntariamente em postes com várias geometrias e texturas. No total, havia 9 opções: 3 “naturais”, 3 com diâmetro alterado e 3 com textura alterada.
As opções "naturais" são nomeadas assim, porque os poleiros eram feitos de galhos reais (19 mm de diâmetro) de três árvores diferentes:
- Carvalho californiano - a superfície é áspera em diferentes partes de um ramo;
- ceiba é magnífico - a superfície é relativamente lisa, os galhos são macios;
- osmanthus perfumado - a superfície é longitudinalmente rugosa, os galhos são duros.
Para experimentos com diâmetro modificado do poste, foram utilizados pinos de bétula comuns de diferentes diâmetros como material:
- 38 mm - diâmetro muito grande para esse tipo de papagaio;
- 19 mm - o papagaio pode segurar parcialmente (os dedos dianteiros e traseiros não se tocam);
- 6 mm - o papagaio pode segurar totalmente (os dedos dianteiros e traseiros tocam).
Para experimentos com diferentes texturas, um poste de bétula com um diâmetro de 19 mm foi envolvido em três materiais diferentes:
- espuma - textura macia e elástica;
- teflon - textura escorregadia;
- A lixa é uma textura áspera e áspera.
O papagaio está testando todas as 9 opções para o local de pouso.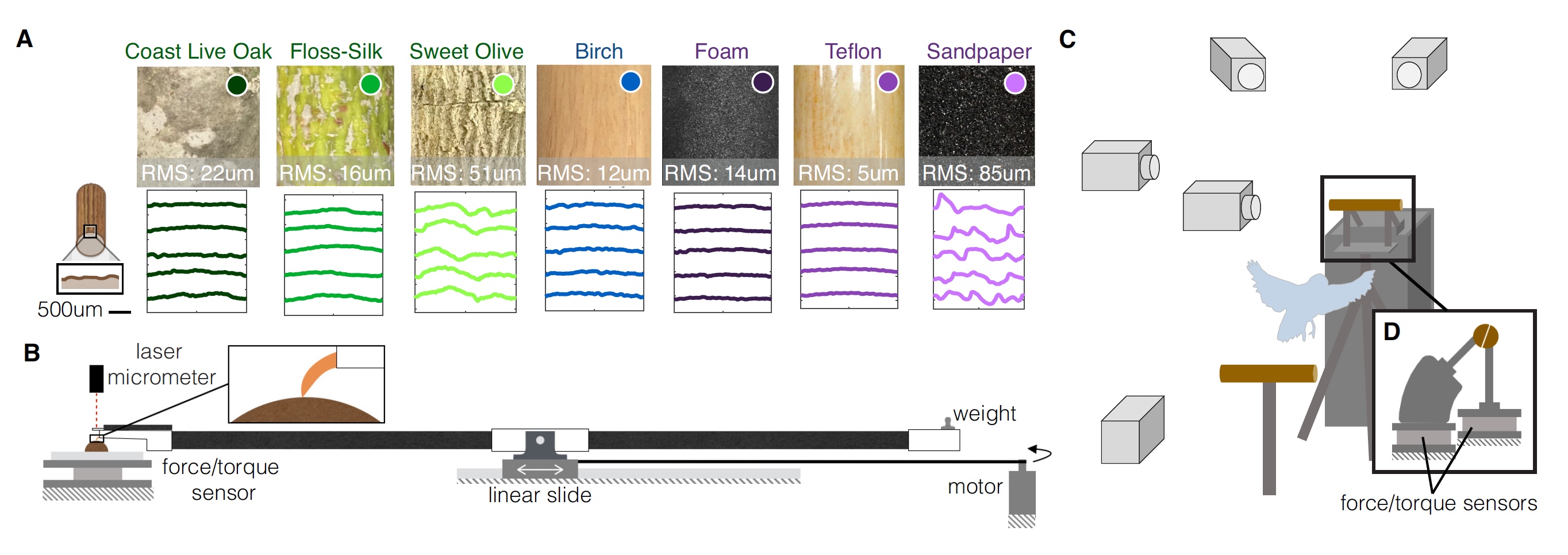 Imagem Nº 1
Imagem Nº 1Foi realizada uma varredura tridimensional da luz estrutural de cada uma das variantes de perfuração, o que possibilitou descrever quantitativamente a textura da superfície de cada uma delas e recriar perfis de superfície (
1A ). Para avaliar o efeito desses recursos texturais na interação da superfície do poleiro e pé do papagaio, os pesquisadores realizaram testes de resistência dos dedos e garras para medir as forças de atrito de cada superfície. A pressão da garra também foi avaliada para medir a deformação da superfície (
1B ).
No diagrama
1C, vemos que todos os testes foram realizados sob o olhar de várias câmeras de alta velocidade e os pólos foram serrados ao meio. Sensores de força e momento de força são conectados a cada metade.
Resultados da pesquisa
Primeiro, considere a dinâmica das asas e pernas durante o pouso.
Em todos os testes com todas as variantes da superfície de pouso, os sujeitos mostraram a mesma dinâmica clássica. A aterrissagem começa com a frenagem da asa (fase aérea), após a qual as patas absorvem o impulso restante em contato com o poleiro (fase de absorção). O contato foi feito com as duas patas com um atraso de alguns milissegundos, ou seja, o primeiro pé em contato com o mastro é o pé preferido:
- Sujeito número 1 - em 100% dos casos, a pata direita;
- Sujeito n ° 2 - em 83% dos casos, o pé esquerdo;
- Sujeito n ° 3 - em 85% dos casos, o pé esquerdo.
Após o contato, a fase de fixação começa, quando o papagaio fixa os dedos ao redor do poleiro de maneira mais confiável e firme. Isso é seguido por um estágio que nem sempre é encontrado, mas geralmente é a fase de ajuste, quando eles de alguma forma mudam a posição das patas ou dedos no poleiro.
Todas as fases da aterrissagem de um papagaio (corresponde ao esquema em 2A ). Imagem No. 2
Imagem No. 2Às vezes, os papagaios, aparentemente superestimando ou subestimando as condições do teste, levemente não voam / voam sobre o local de pouso (
2B ), o que leva a uma maior dispersão do ângulo de inclinação do pé, no qual eles estabelecem uma aderência estática.
É curioso que, se houver alguma variação nos indicadores de força das pernas (
2B ) e direção (
2C ), os valores médios da força de aterrissagem permaneçam surpreendentemente os mesmos para diferentes pólos.
A diferença nos indicadores vistos durante o pouso pode ser explicada pela estratégia de pouso dos papagaios. Existe uma teoria segundo a qual as aves controlam seu pouso avaliando visualmente o tempo de contato com a superfície,
τ (
t ). Para um pouso bem-sucedido, eles ajustam a velocidade de aproximação para manter um
τ (
t ) constante. Se um pouco mais detalhado:
τ é definido como a distância para o poleiro (
s ) dividido pela velocidade de aproximação (
v ).
Se o pássaro desacelera com desaceleração constante (
a ), então
τ =
s /
v = 0,5
a 2 /
at = 0,5
t , caso em que
τ (
t ) = 0,5.
Se
τ (
t ) <0,5, a inibição diminuirá até o momento do contato com o poleiro. E se 0,5 <
τ (
t ) <1, a frenagem aumentará até que o pássaro faça uma colisão controlada com a superfície de pouso.
Dada a cinemática descrita acima, os papagaios mantêm valores relativamente constantes de
τ (
2E ) correspondentes a valores de colisões controladas (
2F ). O menor valor médio
τ = 0,80 foi observado em testes com haste com o menor diâmetro (6 mm). E o valor mais alto de
τ = 0,94 foi em testes com um poste coberto de espuma. Isso sugere que os papagaios aumentam a frenagem ao se aproximar de uma superfície de pouso suave.
A presença de um
τ alto (ou seja, maior que 0,5) em todos os testes com todos os tipos de superfície sugere que as aves não concluíram o pouso no momento do toque.
Tendo nos familiarizado um pouco com a dinâmica do pouso, passaremos à cinemática dos pés e garras de nossos amigos emplumados.
Dada a uniformidade de comportamento durante o pouso, independentemente do tipo de superfície, os pesquisadores concluíram que os pássaros respondem às diferenças na textura e na geometria do poste de pouso precisamente com suas patas e garras, e não com suas asas. Parece lógico, não é? Mas, surpresa, isso não é totalmente verdade.
A cinemática do pé mostrou um conjunto estereotipado semelhante (o mesmo para todos os tipos de poleiros) de estágios de aterrissagem (
3A ,
3B ).
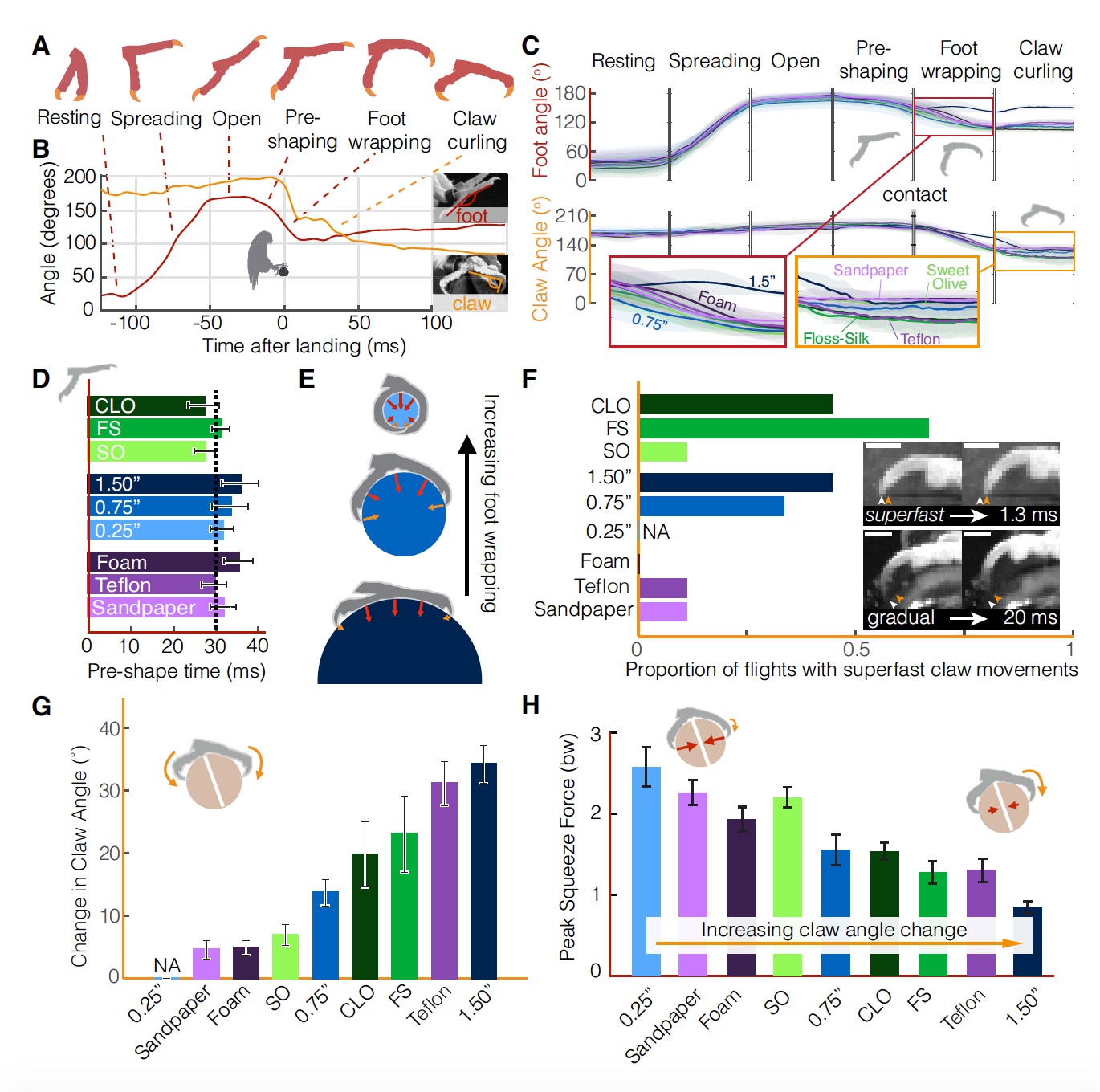 Imagem No. 3
Imagem No. 3Durante o vôo, os pés estão em um estado fechado (fase de repouso), depois começam a abrir cerca de 100 ms antes de tocar no poleiro (fase de abertura com duração de 40 ± 8 ms); depois, há uma fase "aberta", quando dentro de 21 ± 7 ms a parada totalmente divulgado.
Imediatamente antes do contato, os dedos começam a se aproximar (fase da formação preliminar da captura, duração 31 ± 10 ms). Depois de estabelecer contato com a superfície, os dedos começam a agarrar o poleiro (fase da circunferência, duração 19 ± 7 ms). A fase final é a captura de garras com duração de 185 ± 11 ms.
As diferenças na textura e na geometria do poste afetam exclusivamente a cinemática dos estágios de aterrissagem após o contato com a superfície (
3C ). Até o contato, a cinemática do pé e da garra permanece inalterada em todos os testes, mesmo quando os pés começam a fechar durante a fase de pré-aderência.
Em outras palavras, se as aves reagissem à diferença na geometria e textura da superfície de pouso, as mudanças cinemáticas seriam observadas mesmo durante as fases antes do contato, ou seja, ainda no ar. Em vez disso, os papagaios sequencialmente começam a pré-capturar 30 ms antes do pouso (
3D ). Isso leva à suposição de que eles têm soluções previsíveis para o problema de aterrissar em uma superfície incomum.
É importante que o pássaro mantenha um grande ângulo entre as garras até o momento do contato para evitar danos. Além disso, o grau de captura é determinado pelo diâmetro do poste (
3E ). A captura total ocorre no caso de postes com um diâmetro de 6 mm, ou seja, os papagaios podem usar totalmente toda a força de seus dedos e garras para estabilizar.
É importante notar que, no momento do contato, as garras e / ou patas podem deslizar para fora dos pólos, devido à superfície lisa. Como resultado, o ângulo da garra pode variar. Considerando que o estágio de garra pode durar mais de 100 ms, os movimentos individuais de uma única garra (
3F ) podem ocorrer incrivelmente rapidamente (1-2 ms).
Os movimentos super rápidos das garras provavelmente não são regulados apenas pela contração muscular, sugerem os pesquisadores. Também é surpreendente que, entre os vertebrados, os movimentos musculares mais rápidos sejam 5 a 10 vezes mais lentos que esses movimentos superficiais das garras (por exemplo, os músculos do braço humano - 50 ms, o músculo peitoral do beija-flor - 8 ms). A partir disso, podemos concluir que a velocidade de movimento da garra de um papagaio depende da liberação de energia armazenada no tendão elástico e da baixa inércia da garra. Esses movimentos rápidos de garra permitem que os papagaios adaptem instantaneamente sua aderência, dependendo da geometria e textura da superfície de pouso.
Quanto ao grau de captura das garras, depende do diâmetro do poste e da textura (
3G ). A aderência mais pronunciada é observada no caso de um diâmetro de 38 mm. Vale esclarecer que se trata apenas de capturar as garras, e não todas as pernas inteiramente. Ou seja, quanto maior o diâmetro, mais você precisa confiar nas garras, porque as patas não ajudam (
3C ,
3E ). O ângulo da garra em relação à superfície é altamente dependente de sua textura. Por exemplo, no caso de superfícies mais lisas (Teflon), as garras "dobram" mais (
3H ) do que no caso de uma superfície rugosa (lixa), pois nesse caso elas podem simplesmente comprimir a superfície um pouco mais, garantindo uma aderência confiável. Exageradamente falando, as garras se dobram mais quando a superfície é mais difícil de comprimir.
 Imagem No. 4
Imagem No. 4Em seguida, os pesquisadores decidiram verificar como, do ponto de vista da mecânica, os indicadores da força compressiva dos dedos e dobra das garras mudam e como eles afetam a adaptação do pássaro a uma ou outra superfície durante o pouso.
Testes com diferentes texturas dos pólos mostraram que as pontas dos dedos (
4A ) e as garras (
4C ) exibem uma
força de cisalhamento semelhante
* nos momentos de deslizar e agarrar.
Força de cisalhamento * - forças desiguais que empurram uma parte do corpo em uma direção específica e a segunda parte do corpo na direção oposta.
Para almofadas de patas, o método mais adequado para representar a força de cisalhamento em função da força normal para todas as superfícies é o modelo de atrito de Coulomb (
4B ), que permite prever a direção e magnitude da força de atrito entre dois corpos em contato com superfícies secas (portanto, este modelo também é chamado de "modelo de atrito seco" )
Para garras (
4C ), o coeficiente de atrito pode ser 8 vezes maior que o das almofadas das patas (
4A ). Essa diferença pode ser causada, entre outras coisas, pela orientação da garra em relação à superfície (
4D ): na superfície mais macia, a força de atrito permanece relativamente constante, mas em uma superfície rugosa essa força também aumenta com o aumento do ângulo da garra. No entanto, mesmo nos mesmos ângulos, as medições mostram que o coeficiente de força máximo para garras ainda é maior que para as pastilhas (
4E ).
Para compensar a natureza estocástica da aderência à embreagem, as aves podem aproveitar o equilíbrio de carga e o movimento da garra na superfície. A distribuição de carga entre várias garras reduz efetivamente a distribuição da força total esperada de todas as garras (
4E ). Além disso, as aves podem estender suas garras, o que lhes permite aumentar a probabilidade de adesão a uma superfície irregular, se houver. Isso aumenta o valor esperado da força de atrito (
4F ), o que explica a flexão mais pronunciada das garras em superfícies mais difíceis de comprimir com firmeza (
3F ). Esticar as garras oferece uma vantagem no caso de superfícies nas quais existem poucas irregularidades, mas são bastante grandes. No entanto, essa afirmação é um pouco inconsistente com as observações, porque os papagaios não procuraram muito estender suas garras, e isso sugere que eles não escolhem as melhores colisões durante o plantio. Portanto, eles dobram suas garras o máximo possível até que seja alcançada força suficiente para manter uma aderência estável. Se durante esse processo essa força não for alcançada, o pássaro começará a ajustar a posição das garras ou a decolar.
 Imagem No. 5
Imagem No. 5A diferença entre os coeficientes de atrito para garras e pastilhas também pode ser explicada pela geometria dessas partes do corpo e pela geometria da superfície de pouso com a qual eles estão em contato. As pastilhas têm uma área maior e uma textura macia, o que permite distribuir a carga em muitos pontos de contato, e isso leva a uma força de atrito mais uniforme. As garras, por sua vez, são grosseiras e possuem uma área pequena, portanto, dependem da interação direta com a geometria da superfície, ou seja, na engrenagem para solavancos.
Para quantificar os efeitos geométricos, os cientistas caracterizaram a forma da garra no plano sagital em largura em função da altura da ponta da garra (
5A ). Além de usar irregularidades de superfície existentes, as garras também podem gerar forças de atrito a partir da deformação da superfície.
Para simular essa interação, medidas da profundidade de penetração da garra em várias superfícies (
5B ) e medidas da geometria da garra foram combinadas. A geometria da ponta da garra foi modelada por uma esfera com um raio de 50 μm para cargas de até 25% do peso corporal (
5C ). Assim, verificou-se que, por exemplo, a profundidade de penetração no poleiro do carvalho da Califórnia é de 10 μm, ou seja, 0,2% do comprimento do arco externo da garra (aproximadamente 5 mm).
A fim de avaliar com mais detalhes o efeito do tamanho da garra na tração, outro modelo foi criado com garras de diferentes diâmetros de ponta agarradas a diferentes superfícies (
5D ). Como esperado, na ausência de penetração de garras na superfície, superfícies mais ásperas são mais adequadas para captura bem-sucedida (
5E ).
Quando os efeitos de penetração de superfície (
5F ) foram adicionados ao modelo, verificou-se que a superfície útil foi aumentada. Além disso, quanto mais pronunciado o efeito, menor o ângulo formado entre o eixo vertical e o vetor de força líquida na garra. Se o raio e a massa da ponta da garra forem dimensionados isometricamente e as forças aplicadas dependerem da massa, o coeficiente de profundidade (profundidade de penetração dividido pelo raio da ponta da garra) também será dimensionado isometricamente.
A partir disso, podemos concluir lógico que pequenas irregularidades nessa superfície são suficientes para que pequenos animais adiram efetivamente à superfície.
 Imagem Nº 6
Imagem Nº 6Ao combinar todos os modelos acima para vários efeitos, forças e outras coisas, os pesquisadores criaram um único modelo bidimensional, que leva em consideração simultaneamente os parâmetros das garras, patas e do corpo como um todo (
6A ).
A totalidade dos dados sobre a mecânica de contato dos pés e a superfície de aterrissagem possibilitou aplicar otimização limitada para determinar o “espaço de captura” tridimensional do pássaro e a combinação necessária de força e momento de força (
6B ). , , : , . , (
6C ).
, . , . , . : , .
, , . , , , . , .
.
Epílogo
, , . . , . , , , . , . - -, - — . , , - , . , , , .
Sexta-feira off-top:
( , ), .
Obrigado pela atenção, fique curioso e tenha um ótimo final de semana a todos, pessoal! :)
, . ? ? Ajude-nos fazendo um pedido ou recomendando a seus amigos, um
desconto de 30% para os usuários da Habr em um análogo exclusivo de servidores básicos que inventamos para você: Toda a verdade sobre o VPS (KVM) E5-2650 v4 (6 núcleos) 10GB DDR4 240GB SSD 1Gbps de US $ 20 ou como dividir o servidor? ( RAID1 RAID10, 24 40GB DDR4).
Dell R730xd 2 ? 2 Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 $199 ! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — $99! . c Dell R730xd 5-2650 v4 9000 ?