Para tornar a captura robótica mais confiável, os pesquisadores estão desenvolvendo objetos tão complexos quanto possível de manipular.
 Inspirados no conceito de imagens competitivas, pesquisadores da Universidade da Califórnia em Berkeley estudam objetos físicos competitivos cuidadosamente projetados para serem difíceis de capturar com garras robóticas padrão
Inspirados no conceito de imagens competitivas, pesquisadores da Universidade da Califórnia em Berkeley estudam objetos físicos competitivos cuidadosamente projetados para serem difíceis de capturar com garras robóticas padrãoRecentemente, uma enorme quantidade de pesquisa apareceu sobre o tópico “imagens competitivas”, que são imagens de objetos que são modificados, de modo que é especialmente difícil para os algoritmos de visão computacional reconhecê-los. A idéia é usar essas imagens para desenvolver algoritmos de visão computacional mais robustos, uma vez que a natureza "contraditória" é uma opção especialmente implementada "na pior das hipóteses" - e se o seu algoritmo puder lidar com imagens contraditórias, ele provavelmente tratará outras tarefas.
Pesquisadores do Laboratório de Automação e Engenharia (
AUTOLAB ) da Universidade da Califórnia em Berkeley, liderados pelo professor Ken Goldberg, estenderam esse conceito às garras robóticas. Eles projetaram especificamente objetos físicos competitivos para serem difíceis de levantar com os braços robóticos convencionais. Só é necessário corrigir levemente as figuras tridimensionais usuais, e a empunhadura padrão com dois dedos encontrará todos os tipos de dificuldades, tentando agarrar adequadamente o objeto.
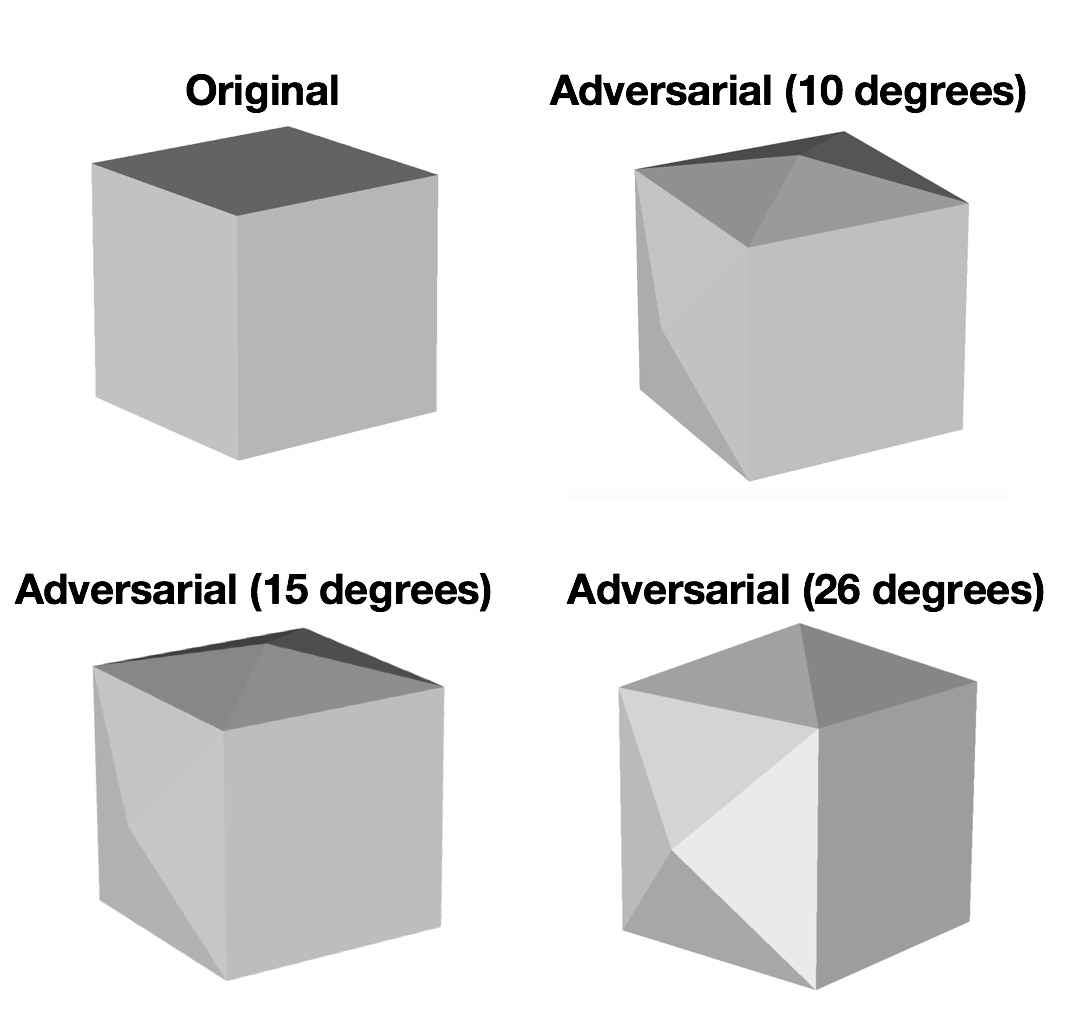 Começando com um cubo, um objeto competitivo evolui, tornando-se cada vez mais difícil de capturar com uma pinça de dois dedos - quando tenta comprimir uma superfície angular, o objeto gira e desliza para fora.
Começando com um cubo, um objeto competitivo evolui, tornando-se cada vez mais difícil de capturar com uma pinça de dois dedos - quando tenta comprimir uma superfície angular, o objeto gira e desliza para fora.A principal característica desses objetos competitivos é que eles parecem fáceis de agarrar, mas com pelo menos um grampo de dois dedos, acaba sendo difícil. A diferença entre a aparência dos objetos e sua geometria real é insignificante: em um exemplo, é um cubo com pirâmides baixas em três dos seis lados - o menor deles tem um ângulo de aresta de 10 graus. E em frente a cada pirâmide há uma face plana comum; portanto, o cubo não possui faces planas opostas. Por esse motivo, as alças de dois dedos que trabalham no grampo de objetos encontram problemas, porque se você tentar fixar a superfície em um ângulo, a força de compressão fará com que o objeto gire e, muitas vezes, caia do grampo.
 A captura paralela com contatos pontuais captura com sucesso um cubo regular (esquerda) e não pode lidar com um cubo competitivo desenvolvido por pesquisadores (direita)
A captura paralela com contatos pontuais captura com sucesso um cubo regular (esquerda) e não pode lidar com um cubo competitivo desenvolvido por pesquisadores (direita)Os planejadores de captura geralmente procuram superfícies opostas suaves que podem ser fixadas e, como a diferença entre um cubo competitivo e um cubo regular é pequena o suficiente para um sensor 3D faltar, a maioria dos sistemas robóticos pensa: “Oh, olha, este é um cubo, é muito fácil ! " E então eles certamente falharão na tarefa quando o cubo sair e escapar de suas garras.
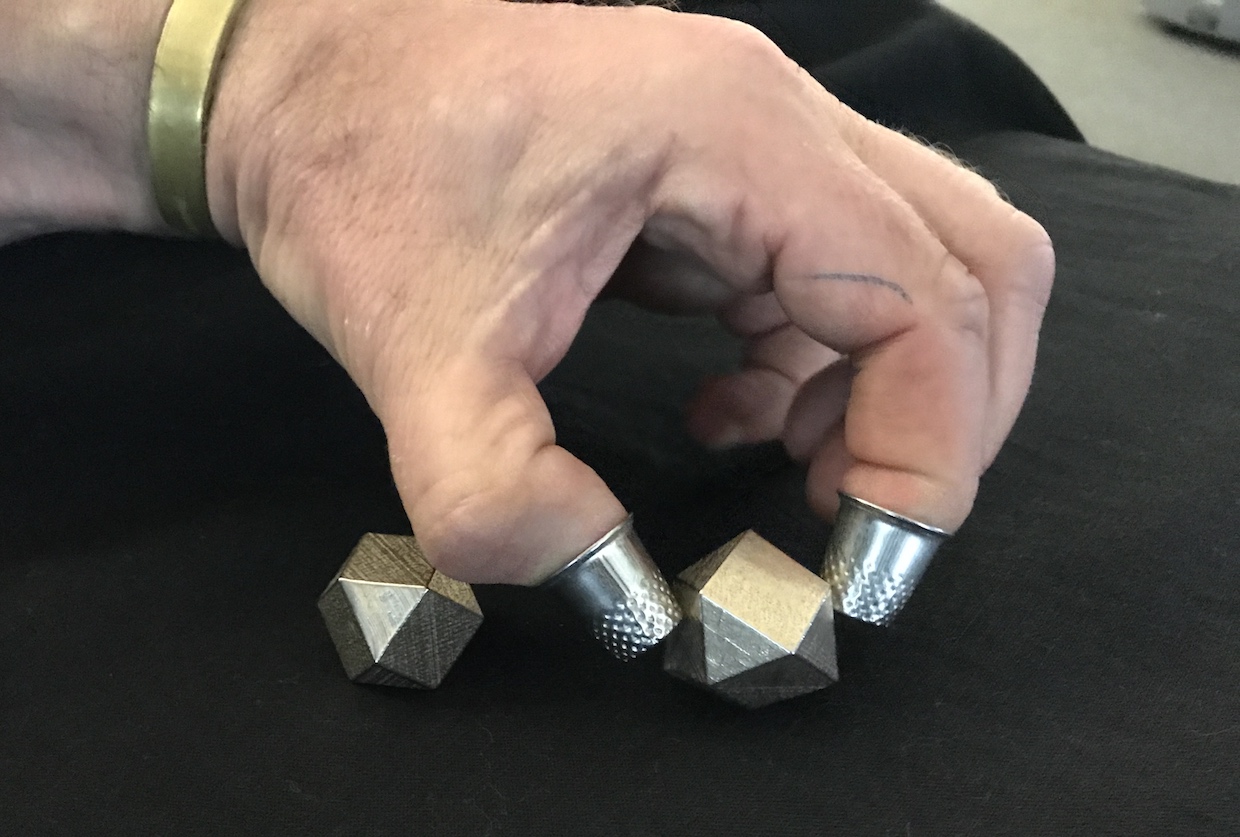 Formas adversas também funcionam em humanos - usando dedais que imitam o aço frio e insensível do robô e usando dois dedos para prender o objeto, os pesquisadores confirmaram que é difícil erguer esses objetos
Formas adversas também funcionam em humanos - usando dedais que imitam o aço frio e insensível do robô e usando dois dedos para prender o objeto, os pesquisadores confirmaram que é difícil erguer esses objetosCom a crescente complexidade do formulário, torna-se cada vez mais difícil desenvolver uma versão competitiva. Tomando o cuboctaedro (um poliedro com oito faces triangulares e seis quadradas), os pesquisadores mudaram aleatoriamente os vértices da figura (na simulação) até obter uma forma que não tem faces diretamente opostas. E para formas mais complexas, como cilindros que se cruzam, foram obtidos exemplos competitivos usando o algoritmo de aprendizado profundo.
 Para formas mais complexas, como cilindros que se cruzam, foram obtidos exemplos competitivos usando algoritmos de aprendizado profundo
Para formas mais complexas, como cilindros que se cruzam, foram obtidos exemplos competitivos usando algoritmos de aprendizado profundoEm
testes preliminares no mundo real, a captura de pontos paralelos tentou levantar alguns desses objetos controversos. Em cada caso, a probabilidade estimada de capturar o objeto era de 100% (com base na política
Dex-Net testada na simulação), mas, de fato, as capturas bem-sucedidas de cubos competitivos e cuboctahedra foram bem-sucedidas apenas em 13% dos casos.
Os pesquisadores dizem que planejam testar esses objetos com vários tipos de alças, bem como com alças a vácuo, para ver se conseguem criar os objetos mais competitivos de todos. E lembre-se de que o objetivo de tudo isso não é apenas enganar os infelizes algoritmos de captura, mas desenvolver ferramentas que ajudarão a fazer a captura robótica funcionar suficientemente (espero) confiável para o mundo real.