 Fonte: xkcd
Fonte: xkcdA regressão linear é um dos algoritmos básicos para muitas áreas relacionadas à análise de dados. A razão para isso é óbvia. Este é um algoritmo muito simples e compreensível, que contribuiu para seu uso generalizado por muitas dezenas, senão centenas, de anos. A idéia é que assumimos uma dependência linear de uma variável em um conjunto de outras variáveis e, em seguida, tentamos restaurar essa dependência.
Mas este artigo não trata da aplicação de regressão linear para resolver problemas práticos. Aqui discutiremos recursos interessantes da implementação de algoritmos distribuídos para sua recuperação que encontramos ao escrever um módulo de aprendizado de máquina no
Apache Ignite . Um pouco de matemática básica, os conceitos básicos de aprendizado de máquina e computação distribuída ajudarão você a descobrir como restaurar a regressão linear, mesmo que os dados sejam distribuídos por milhares de nós.
Do que você está falando?
Somos confrontados com a tarefa de restaurar a dependência linear. Como entrada, são fornecidos muitos vetores de variáveis supostamente independentes, cada uma delas associada a um determinado valor da variável dependente. Esses dados podem ser representados na forma de duas matrizes:
\ begin {pmatrix} a_ {11} e a_ {12} e a_ {13} e ... & a_ {1n} \\ a_ {21} e a_ {22} e a_ {23} e ... & a_ {2n} \\ ... \\ a_ {m1} e a_ {m2} e a_ {m3} e ... & a_ {mn} \\ \ end {pmatrix} \ begin {pmatrix} b_ {1} \\ b_ {2} \\ ... \\ b_ {m} \\ \ end {pmatrix}
\ begin {pmatrix} a_ {11} e a_ {12} e a_ {13} e ... & a_ {1n} \\ a_ {21} e a_ {22} e a_ {23} e ... & a_ {2n} \\ ... \\ a_ {m1} e a_ {m2} e a_ {m3} e ... & a_ {mn} \\ \ end {pmatrix} \ begin {pmatrix} b_ {1} \\ b_ {2} \\ ... \\ b_ {m} \\ \ end {pmatrix}
Agora, como a dependência é assumida e, além de linear, escrevemos nossa suposição na forma de um produto de matrizes (para simplificar a notação aqui e abaixo, assume-se que o termo livre da equação esteja oculto por trás
xn e a última coluna da matriz
A contém unidades):
\ begin {pmatrix} a_ {11} e a_ {12} e a_ {13} e ... & a_ {1n} \\ a_ {21} e a_ {22} e a_ {23} e ... & a_ {2n} \\ ... \\ a_ {m1} e a_ {m2} e a_ {m3} e ... & a_ {mn} \\ \ end {pmatrix} \ times \ begin {pmatrix} x_ { 1} \\ x_ {2} \\ ... \\ x_ {n} \\ \ end {pmatrix} = \ begin {pmatrix} b_ {1} \\ b_ {2} \\ ... \\ b_ {m} \\ \ end {pmatrix}
\ begin {pmatrix} a_ {11} e a_ {12} e a_ {13} e ... & a_ {1n} \\ a_ {21} e a_ {22} e a_ {23} e ... & a_ {2n} \\ ... \\ a_ {m1} e a_ {m2} e a_ {m3} e ... & a_ {mn} \\ \ end {pmatrix} \ times \ begin {pmatrix} x_ { 1} \\ x_ {2} \\ ... \\ x_ {n} \\ \ end {pmatrix} = \ begin {pmatrix} b_ {1} \\ b_ {2} \\ ... \\ b_ {m} \\ \ end {pmatrix}
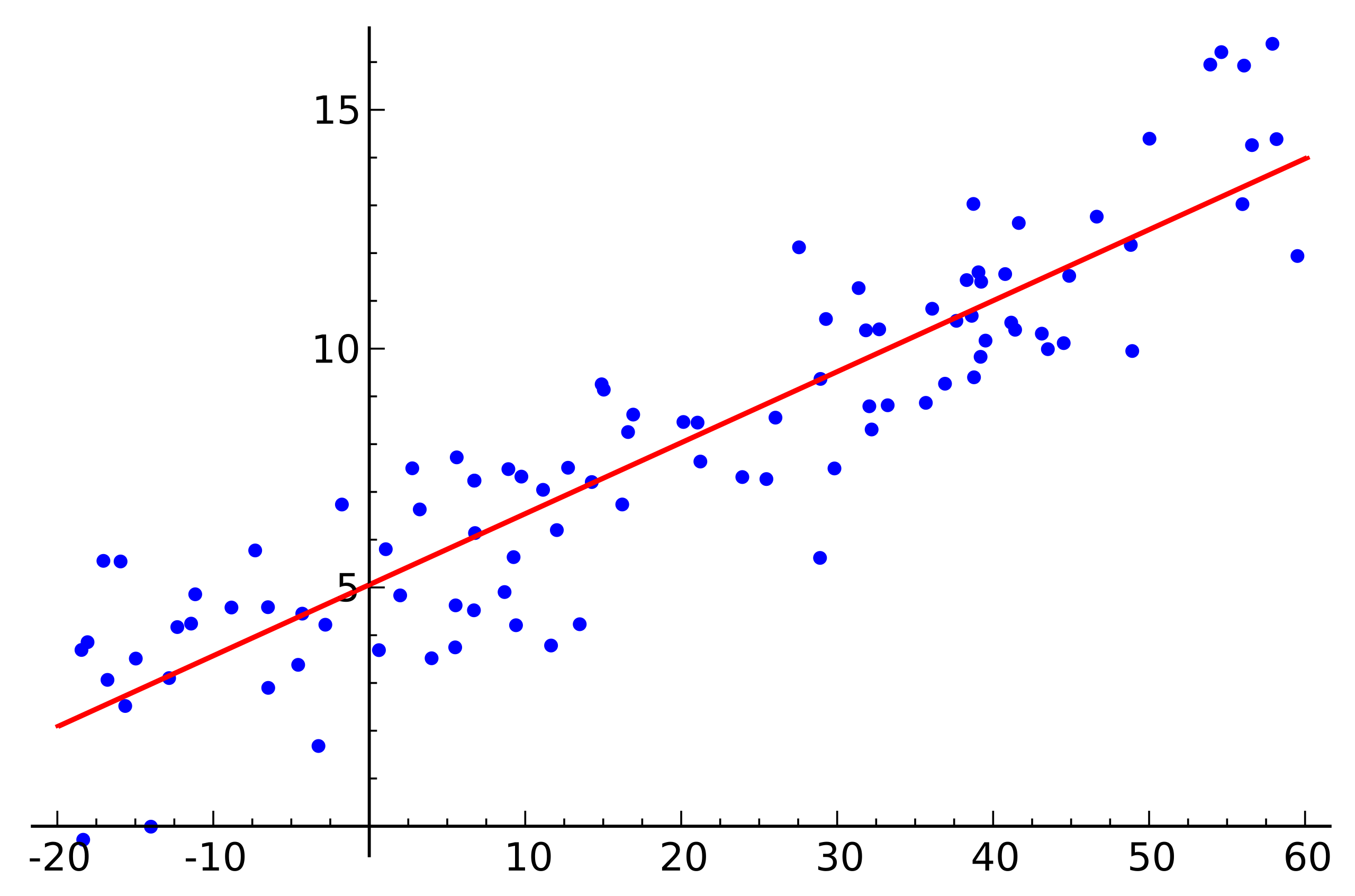
Muito parecido com um sistema de equações lineares, certo? Parece, mas provavelmente não haverá soluções para esse sistema de equações. A razão para isso é o ruído presente em quase todos os dados reais. Além disso, o motivo pode ser a falta de um relacionamento linear, como tal, que você pode tentar combater introduzindo variáveis adicionais que não linearmente dependem da fonte. Considere o seguinte exemplo:
 Fonte: Wikipedia
Fonte: WikipediaEste é um exemplo simples de regressão linear que mostra a dependência de uma variável (ao longo do eixo
y ) de outra variável (ao longo do eixo
x ) Para que o sistema de equações lineares correspondentes a este exemplo tenha uma solução, todos os pontos devem estar exatamente em uma linha reta. Mas isso não é verdade. Mas eles não estão em uma linha reta precisamente por causa do ruído (ou porque a suposição da presença de uma dependência linear foi errônea). Assim, para restaurar uma dependência linear de dados reais, geralmente é necessário introduzir mais uma suposição: os dados de entrada contêm ruído e esse ruído tem uma
distribuição normal . Pode-se fazer suposições sobre outros tipos de distribuição de ruído, mas na grande maioria dos casos, é a distribuição normal que será discutida mais adiante.
Método de máxima verossimilhança
Portanto, assumimos a presença de ruído aleatório distribuído normalmente. Como estar em tal situação? Para este caso, na matemática existe e é amplamente utilizado
o método da máxima verossimilhança . Em suma, sua essência reside na escolha da
função de probabilidade e sua subsequente maximização.
Voltamos à restauração da dependência linear de dados com ruído normal. Observe que a relação linear assumida é uma expectativa matemática
mu distribuição normal disponível. Ao mesmo tempo, a probabilidade de que
mu assume um ou outro valor, sujeito à presença de observáveis
x , tem a seguinte aparência:
P( mu midX, sigma2)= prodx inX frac1 sigma sqrt2 pie− frac(x− mu)22 sigma2
Substituímos agora
mu e
X variáveis que precisamos:
P(x midA,B, sigma2)= prodi in[1,m] frac1 sigma sqrt2 pie− frac(bi−aix)22 sigma2,ai emA,bi emB
Resta apenas encontrar o vetor
x na qual essa probabilidade é máxima. Para maximizar essa função, é conveniente prologaritmo primeiro (o logaritmo da função atingirá seu máximo no mesmo ponto que a própria função):
f(x)=ln( prodi in[1,m] frac1 sigma sqrt2 pie− frac(bi−aix)22 sigma2)= sumi in[1,m]em frac1 sigma sqrt2 pi− sumi in[1,m] frac(bi−aix)22 sigma2
O que, por sua vez, se resume a minimizar a seguinte função:
f(x)= sumi in[1,m](bi−aix)2
A propósito, isso é chamado de método dos
mínimos quadrados . Freqüentemente, todo o raciocínio acima é omitido e esse método é simplesmente usado.
Decomposição QR
O mínimo da função acima pode ser encontrado se você encontrar o ponto em que o gradiente dessa função é igual a zero. E o gradiente será escrito da seguinte maneira:
nablaf(x)= sumi in[1,m]2ai(aix−bi)=0
A decomposição QR é um método de matriz para resolver o problema de minimização usado no método dos mínimos quadrados. Nesse sentido, reescrevemos a equação na forma de matriz:
ATAx=ATb
Então, nós colocamos a matriz
A em matrizes
Q e
R e realizar uma série de transformações (o próprio algoritmo de decomposição QR não será considerado aqui, apenas seu uso em relação à tarefa):
\ begin {align} e (QR) ^ T (QR) x = (QR) ^ Tb; \\ & R ^ T Q ^ T Q R x = R ^ T Q ^ T b; \\ \ end {align}
\ begin {align} e (QR) ^ T (QR) x = (QR) ^ Tb; \\ & R ^ T Q ^ T Q R x = R ^ T Q ^ T b; \\ \ end {align}
Matrix
Q é ortogonal. Isso nos permite livrar-nos do trabalho.
QQT :
\ begin {align} & R ^ T R x = R ^ T Q ^ T b; \\ & (R ^ T) ^ {- 1} R ^ T R x = (R ^ T) ^ {- 1} R ^ T Q ^ T b; \\ & R x = Q ^ T b. \ end {align}
\ begin {align} & R ^ T R x = R ^ T Q ^ T b; \\ & (R ^ T) ^ {- 1} R ^ T R x = (R ^ T) ^ {- 1} R ^ T Q ^ T b; \\ & R x = Q ^ T b. \ end {align}
E se você substituir
QTb em
z vai acabar
Rx=z . Dado que
R é a matriz triangular superior, fica assim:
\ begin {pmatrix} r_ {11} e r_ {12} e r_ {13} e r_ {14} e ... & r_ {1n} \\ 0 & r_ {22} e r_ {23} e r_ { 24} & ... & r_ {2n} \\ 0 & 0 & r_ {33} & r_ {34} & ... & r_ {3n} \\ 0 & 0 & 0 & r_ {44} & .. . & r_ {4n} \\ ... \\ 0 & 0 & 0 & 0 & ... & r_ {nn} \\ \ end {pmatrix} \ times \ begin {pmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \\ ... \\ x_n \ end {pmatrix} = \ begin {pmatrix} z_1 \\ z_2 \\ z_3 \\ z_4 \\ ... \\ z_n \ end {pmatrix}
\ begin {pmatrix} r_ {11} e r_ {12} e r_ {13} e r_ {14} e ... & r_ {1n} \\ 0 & r_ {22} e r_ {23} e r_ { 24} & ... & r_ {2n} \\ 0 & 0 & r_ {33} & r_ {34} & ... & r_ {3n} \\ 0 & 0 & 0 & r_ {44} & .. . & r_ {4n} \\ ... \\ 0 & 0 & 0 & 0 & ... & r_ {nn} \\ \ end {pmatrix} \ times \ begin {pmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \\ ... \\ x_n \ end {pmatrix} = \ begin {pmatrix} z_1 \\ z_2 \\ z_3 \\ z_4 \\ ... \\ z_n \ end {pmatrix}
Isso pode ser resolvido pelo método de substituição. Item
xn é como
zn/rnn item anterior
xn−1 é como
(zn−1−rn−1,nxn)/rn−1,n−1 e assim por diante.
Vale a pena notar aqui que a complexidade do algoritmo resultante através do uso da decomposição QR é
O(2milhões2) . Além disso, apesar do fato de a operação de multiplicação de matrizes ser bem paralelizada, não é possível escrever uma versão distribuída eficaz desse algoritmo.
Descida de gradiente
Falando em minimizar uma determinada função, vale sempre a pena recordar o método de descida (estocástica) de gradientes. Este é um método de minimização simples e eficaz, baseado no cálculo iterativo do gradiente de uma função em um ponto e depois no deslocamento para o lado oposto ao gradiente. Cada uma dessas etapas reduz a solução ao mínimo. O gradiente tem a mesma aparência:
nablaf(x)= sumi in[1,m]2ai(aix−bi)
Este método também é bem paralelizado e distribuído devido às propriedades lineares do operador de gradiente. Observe que na fórmula acima, termos independentes estão sob o signo da soma. Em outras palavras, podemos calcular o gradiente independentemente para todos os índices
i do primeiro ao
k , paralelamente a isso, calcule o gradiente para índices com
k+1 antes
m . Em seguida, adicione os gradientes resultantes. O resultado da adição será o mesmo que se calculássemos imediatamente o gradiente para os índices do primeiro ao
m . Assim, se os dados são distribuídos entre várias partes dos dados, o gradiente pode ser calculado independentemente em cada parte e, em seguida, os resultados desses cálculos podem ser somados para obter o resultado final:
nablaf(x)= sumi inP12ai(aix−bi)+ sumi inP22ai(aix−bi)+...+ sumi inPk2ai(aix−bi)
Em termos de implementação, isso se encaixa no paradigma
MapReduce . Em cada etapa da descida do gradiente, uma tarefa para calcular o gradiente é enviada para cada nó de dados, os gradientes calculados são coletados juntos e o resultado de sua soma é usado para melhorar o resultado.
Apesar da simplicidade de implementação e da capacidade de executar no paradigma MapReduce, a descida em gradiente também tem suas desvantagens. Em particular, o número de etapas necessárias para alcançar a convergência é significativamente maior em comparação com outros métodos mais especializados.
LSQR
O LSQR é outro método de solução do problema, adequado tanto para a reconstrução da regressão linear quanto para a solução de sistemas de equações lineares. Sua principal característica é que combina as vantagens dos métodos matriciais e uma abordagem iterativa. As implementações desse método podem ser encontradas na biblioteca
SciPy e no
MATLAB . Uma descrição desse método não será fornecida aqui (ele pode ser encontrado no artigo do
LSQR: Um algoritmo para equações lineares esparsas e mínimos quadrados esparsos ). Em vez disso, será demonstrada uma abordagem para adaptar o LSQR à execução em um ambiente distribuído.
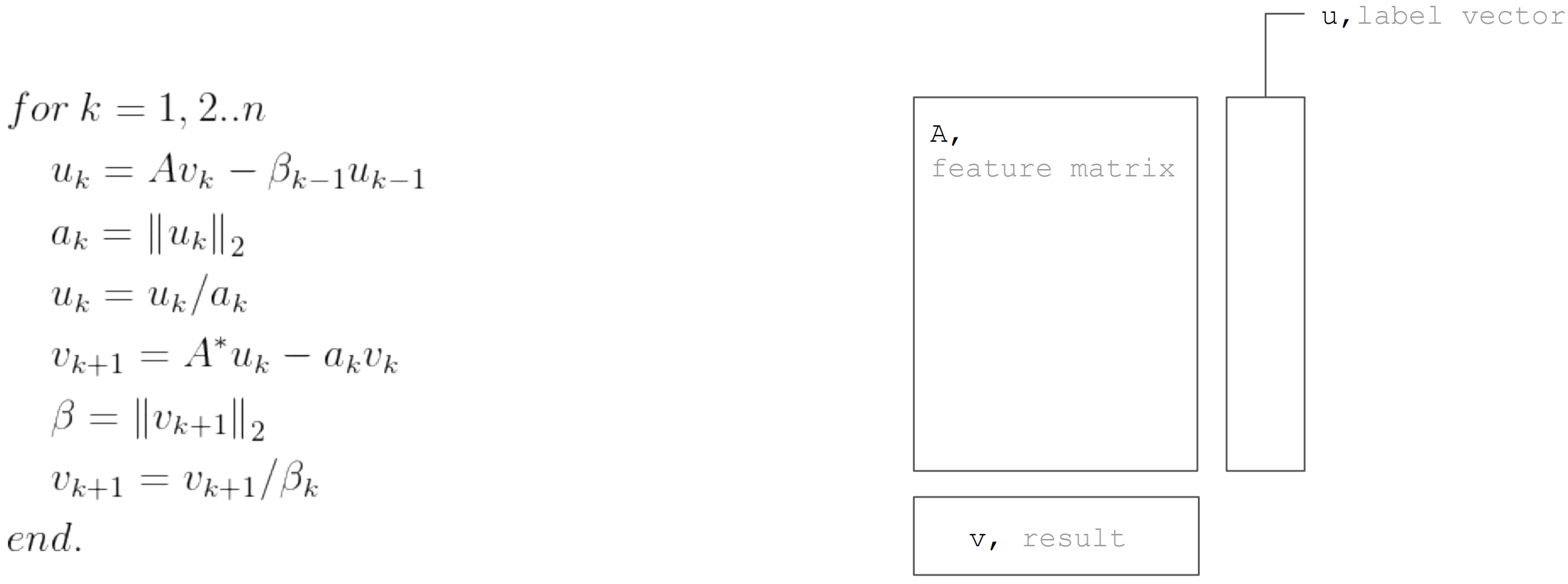
O método LSQR é baseado no
procedimento de bidiagonalização. Este é um procedimento iterativo, cada iteração consiste nas seguintes etapas:
Mas com base no fato de que a matriz
A particionado horizontalmente, cada iteração pode ser representada como duas etapas MapReduce. Assim, é possível minimizar as transferências de dados durante cada iteração (apenas vetores com um comprimento igual ao número de incógnitas):
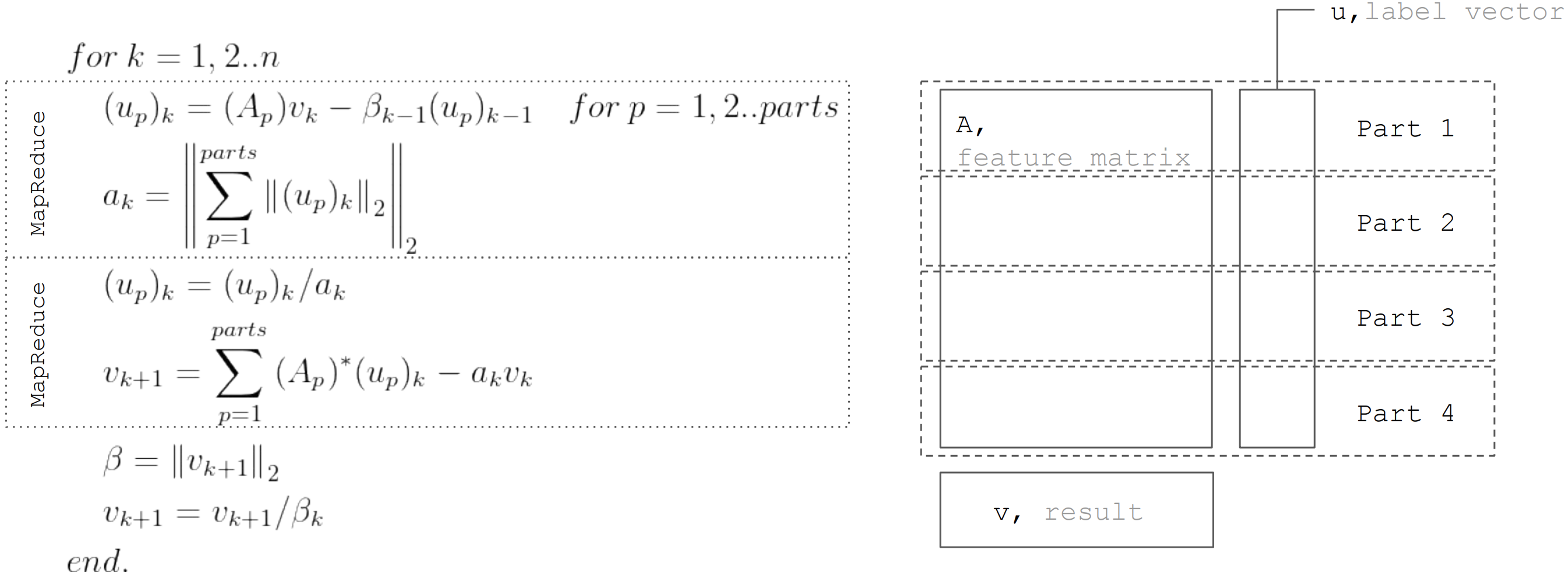
Essa abordagem é usada ao implementar a regressão linear no
Apache Ignite ML .
Conclusão
Existem muitos algoritmos de recuperação de regressão linear, mas nem todos podem ser aplicados em quaisquer condições. Portanto, a decomposição do QR é ótima para soluções precisas em pequenas matrizes de dados. A descida de gradiente é simplesmente implementada e permite que você encontre rapidamente uma solução aproximada. E o LSQR combina as melhores propriedades dos dois algoritmos anteriores, uma vez que pode ser distribuído, converge mais rapidamente em comparação com a descida do gradiente e também permite uma parada antecipada do algoritmo, ao contrário da decomposição QR, para encontrar uma solução aproximada.