Quero falar sobre a segunda versão da minha máquina eletro-mecânica de mármore e o processo de seu design. Sobre o primeiro carro em espiral que
eu já escrevi aqui em um hub Desde então, pouco tempo se passou, e agora, em princípio, o plano foi implementado: dois elevadores e duas descidas trabalham juntos como um sistema, transferem as bolas umas para as outras, misturando-as em ordem aleatória. Honestamente, eu não gosto de tudo aqui, algumas coisas exigem retrabalho ou ajuste mais refinado, mas estou feliz por ter feito isso em geral. O resultado no vídeo!
Eu trabalho como programador. Ao programar, muitas vezes acontece que você escreve e depura o código por uma semana, mas, depois de repensá-lo, simplesmente exclui tudo o que foi criado pelo excesso de trabalho em uma semana e escreve novamente em duas horas já limpas, funcionando e penteadas. Ao desenvolver minha máquina de mármore, me deparei com o fato de que aqui, no mundo físico, esse princípio não funciona. Ou funciona, mas é fraco ... ou ainda não entendo como fazê-lo funcionar dessa maneira.
Existem vários problemas.
O primeiro problema é provavelmente a minha qualificação insuficientemente alta como projetista de máquinas de mármore; Eu acho que isso é uma desvantagem temporária, talvez eu ainda possa melhorar minhas habilidades. Eu usei o ambiente de design KOMPAS-3D. Na verdade, dominar essa ferramenta não é fácil. Talvez agora eu possa usar cerca de 2-3% dos recursos do COMPASS. Tive que reler várias instruções e revisar vários vídeos de demonstração no youtube. Atualmente, aprendi a projetar peças individuais, mas ainda não sei como combiná-las em um único design em um modelo 3D para garantir que as peças rotativas interajam corretamente, não se apeguem umas às outras onde não é necessário, que seu movimento seja suficiente. Então, eu realmente não imagino se nos editores 3D modernos é possível simular o movimento de peças livres, por exemplo, o movimento de uma bola em um plano inclinado, modelando o local onde a bola cai e assim por diante. Em geral, há algo para eu aprender.
Eu posso dar um exemplo do meu COMPASS de auto-treinamento. Mesmo quando estava projetando as primeiras máquinas de mármore em espiral, encontrei o problema de não saber fazer vários planos em um ligeiro ângulo. É fácil projetar peças nas quais os planos principais são ortogonais. Mas e se eu precisar de uma cobra descendente? Então inventei e usei esse truque estranho (nada melhor do que passou pela minha cabeça):

Desenhei um perfil de descida no avião e o apertei:
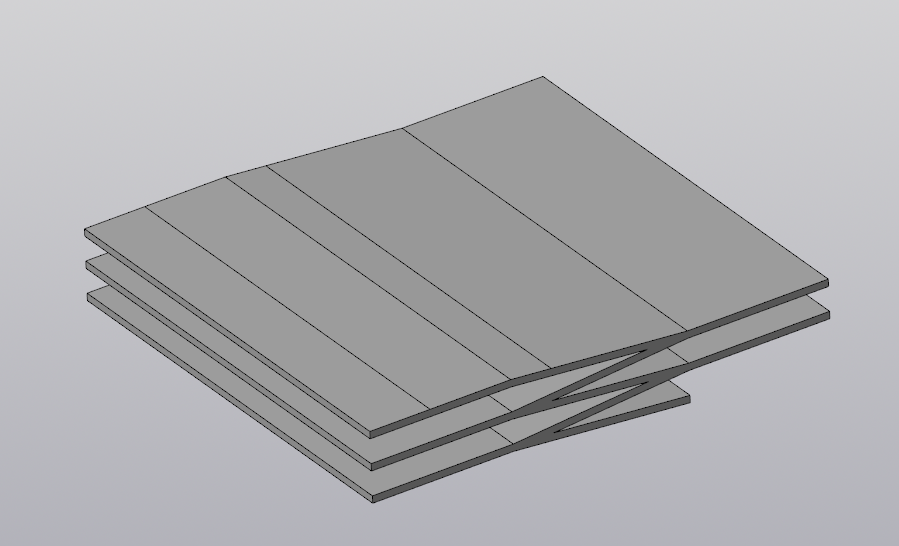
Então ele cortou tudo o que era supérfluo projetando esboços de cima:
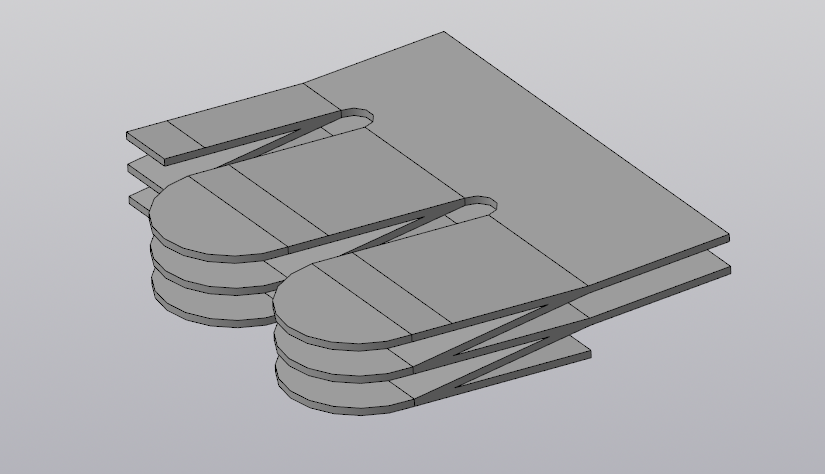
Agora eu já entendo o quão difícil e estúpido era usar essa técnica. Seria muito mais simples usar os planos de bússola de deslocamento, mas não poderia fazê-lo ... Agora, eu teria tornado esse detalhe muito mais fácil.
O segundo problema está parcialmente relacionado ao primeiro problema - é a hora da impressão. Uma impressora 3D com impressão em camadas leva um bom tempo. Acontece que, se ainda não sei como modelar a interação de partes no software, para verificar a operacionalidade do nó, você precisa gastar muito tempo e plástico. Ocorreu-me que eu desenho duas partes e depois as imprimo, mas elas não se encaixam bem e preciso alterar algo no modelo. E isso novamente é uma perda de tempo e plástico. Mas o plástico não é caro, não é uma pena, mas o tempo ... sim, é uma pena.
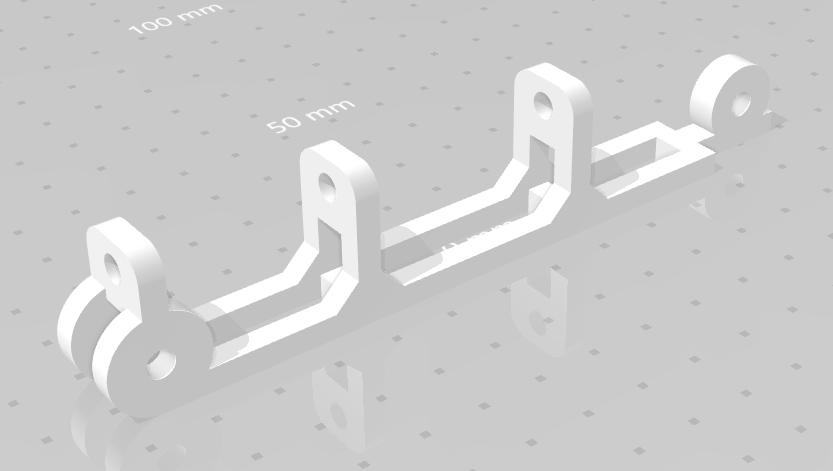
O terceiro problema é a falta de experiência. Muitos dos erros que cometi vêm de ingenuidade e inexperiência. Marble Machine é uma máquina robô com inúmeros estados quando você conta os locais de todas as bolas como um estado separado. A máquina possui muitas peças mecânicas móveis. Ao projetar o guindaste, esperava poder conectar as peças de plástico em movimento através dos orifícios, simplesmente com parafusos / pernos e porcas nas arruelas. Mas aconteceu que isso não funciona. Os furos projetados nas peças plásticas após a impressão são muito pequenos, grandes ou se soltam rapidamente durante a operação. As porcas, mesmo através das arruelas, são sempre soltas. As porcas de travamento automático com um anel de nylon melhoram a situação, mas a peça ainda é inaceitável. Não aperte a porca - ela travará e aperte - haverá muito atrito, o motor não puxará. Eu testei tudo isso em mim até perceber o que precisa ser feito da maneira mais correta possível, a saber: em todos os lugares, os rolamentos devem ser colocados nas partes móveis. Uma solução tão simples, que remove a folga e excelente mobilidade, fricção mínima e nada desaparafusa espontaneamente. Eu tive que refazer muitos modelos para usar o rolamento. Por exemplo, aqui estão modelos de duas partes da biela para um motor de passo:
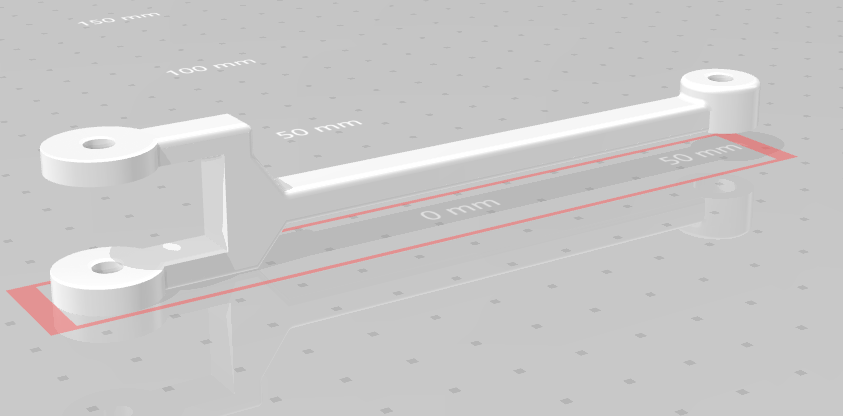
e aqui:

Agora eles estão conectados através de um rolamento. Projetei uma ranhura a partir do assento do rolamento, para que fosse possível inserir o rolamento firmemente no encaixe de interferência e até a possibilidade de apertá-lo com um parafuso.
Estas fotos mostram os locais onde os rolamentos estão agora:

e mais:

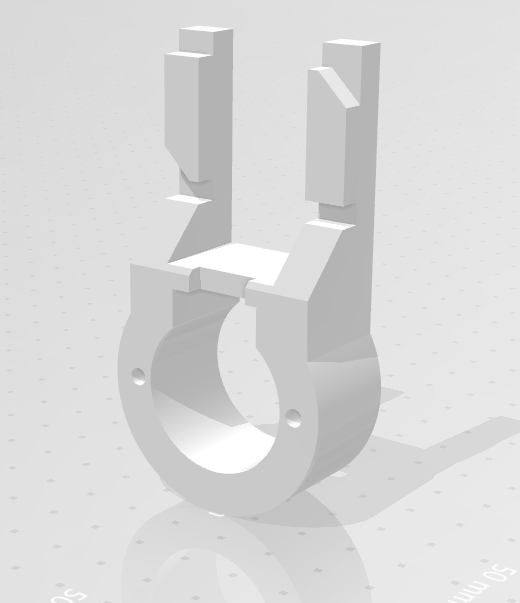
Então, o próximo problema é a rigidez da estrutura. Como você pode ver, estou tentando criar um tipo de objeto de arte robótica mecânica, e a combinação de metal branco, preto e brilhante não é acidental. Na haste do guindaste, eu queria colocar um parafuso prisioneiro de metal M4. Ela teve que dar à barra a força necessária e deveria ter brilhado "nos raios dos holofotes" (se eu os tivesse). No entanto, não deu certo. Com um pino de metal, o peso e a inércia da barra aumentam significativamente. Meu pobre motor de passo mal puxou uma barra para cima, mas ela quase caiu. Tive de tomar medidas extremas aqui: imprimi na impressora um alfinete branco de plástico (PLA branco) com um diâmetro de 4 milímetros, que simplesmente colei dentro da barra onde queria colocar o alfinete de metal. Acabou bem. Construção não muito resistente, mas muito leve. A segunda idéia que me veio mais tarde - o guindaste deveria estar com um contrapeso! E por que não pensei nisso imediatamente? Aqui está a pergunta: refazer o modelo e redigitar a barra inteira ou imprimir uma pequena adição à barra existente e "trabalhar com um arquivo"? Escolhi o segundo, mais rápido - fiz uma peça separada que conteria um local para rolamentos e uma caixa sob a carga - um contrapeso:
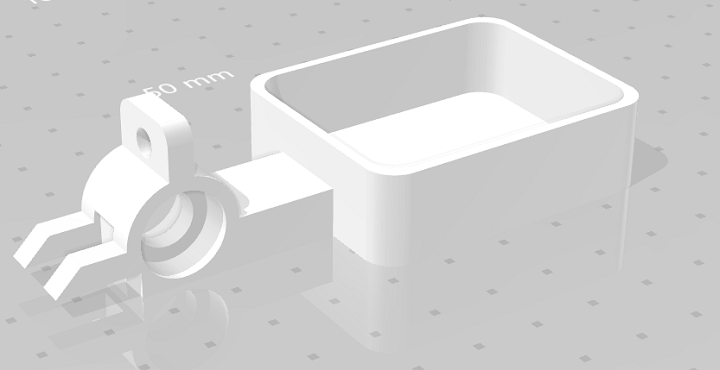
Serrei a cauda da haste e colei uma nova peça na antiga usando dicloroetano.

Aqui a foto mostra o local da colagem. Embora ... nem tudo está claro aqui, porque como equilibrar a torneira? Ele tem um peso variável quando joga bolas ... Devo dizer que ainda subestimei o peso das próprias bolas de metal. Embora não sejam grandes, 12,5 mm, mas cada um pesa 8 gramas, mas age sobre um ombro largo. Quando o guindaste levanta três bolas ao mesmo tempo e as joga na posição superior, vibrações elásticas ocorrem na haste. E como eu os levaria em consideração antecipadamente? Não consigo imaginar. É possível calcular de alguma forma no COMPASS ou em outro CAD?
Em geral, ao desenvolver esta máquina de mármore, fui confrontado com o fato de que muitas coisas não funcionam como eu imagino. Por exemplo, o mais simples é um funil para coletar bolas. Aqui eu fiz uma renderização em 3D dessa parte:

Parece que o que poderia dar errado aqui? Mas, de fato, mesmo esse funil funciona de maneira diferente, não da maneira que eu pensava! Fiz o fundo como parte da superfície da esfera e pensei que as bolas rolariam ao longo de uma tigela e sua velocidade aumentaria à medida que se moviam para a saída. Mas não! Acontece que as bolas rolam e descem mais ladeira abaixo; a inclinação da superfície é menor; elas diminuem a velocidade à medida que se aproximam da saída. Talvez o papel das etapas de 0,2 mm seja a espessura da camada de impressão? Algo não é exatamente o que eu queria ou pensava. Mas pelo menos ele não remodelou este lugar.
Outra questão importante é como encaixar duas máquinas de mármore em uma? Eu já tinha uma máquina espiral e funciona, pode ser deixada como está? Para concordar com o nível do fluxo de bolas da primeira máquina em espiral, tive que desmontá-la completamente, projetá-la em COMPASS e imprimir o suporte da cremalheira em espiral para aumentá-la e remontar a máquina. Então foi necessário criar um fluxostato, um gatilho, uma armadilha embaixo do gatilho, rastrear e girar. Em geral, o processo de criação foi bastante interessante. Eu tenho um amigo e a esposa dele é uma artista, e lembro-me de desenhar uma imagem com peixe por um longo tempo. Eu venho visitá-los, pareço, esses peixes normais. Depois de uma semana eu chego - e os peixes da mesma foto já estão nadando na outra direção. Então, eu tinha algo assim também. Hoje inventei e fiz, mas amanhã repensei e redesenhei tudo, imprimi outro modelo, instalei, testei.
Em seguida, vou lhe dizer quais outros detalhes foram criados. Abaixo está uma renderização 3D desses modelos. Suporte do guindaste:

Em um rack, são fornecidas aberturas sob cartões de motorista do motor.
Prendo a segunda parte no suporte do guindaste: suporte do motor de passo:
Havia também um problema imprevisto - o suporte era muito durável e muito grosso. Agora o motor tem problemas com o resfriamento. Você pode ter que redesenhar este site.
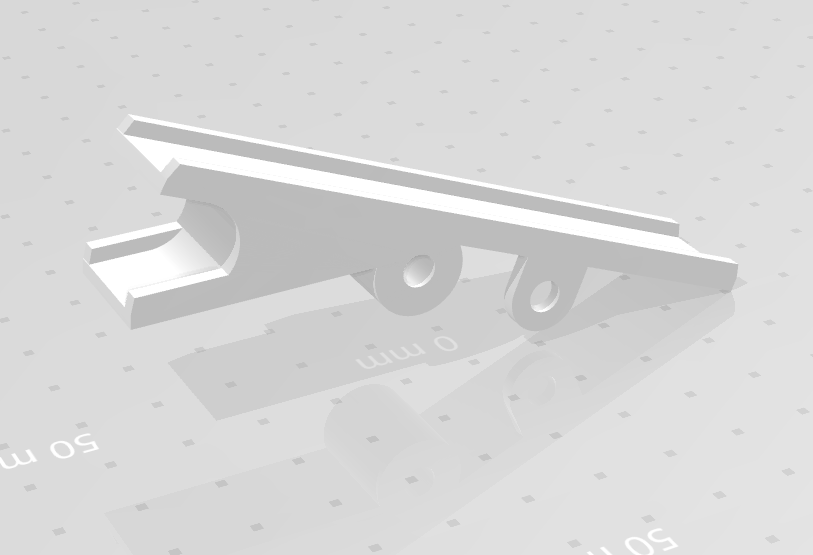
No rack de cima, a parte “triângulo” é presa com parafusos com um assento de rolamento para apoiar a haste do guindaste:

Duas partes da haste do guindaste:
e aqui:

Uma das partes mais importantes é o gatilho do gatilho:
e outra tigela para pegar bolas de um gatilho:

Existem muitos outros pequenos detalhes que, de uma forma ou de outra, precisavam ser inventados, projetados e impressos em movimento.
Para dizer a verdade, depois de montar toda a mecânica, quando mudei para a parte elétrica e a parte do software do projeto, dei um suspiro de alívio, bem ali, tudo é simples!

Para programar a placa FPGA do Mars rover 3bis, ligar dois motores de passo, conectar o solenóide do guindaste e organizar uma pesquisa do interruptor reed, pareceu-me uma tarefa muito mais simples do que o projeto e a implementação da mecânica do robô Marble Machine. Mas a programação FPGA, isso é outra história, se alguém estiver interessado, você pode
ler aqui .
Agora, já estou pensando em projetar os seguintes tipos de elevadores para a próxima versão do Marble Machine v3. Existem opções aqui: parafuso de Arquimedes, guinchos, engrenagens. Há algo em que pensar e algo para esmagar sua cabeça.