Existem muitos artigos na Internet com uma descrição do algoritmo de descida de gradiente. Haverá outro.
Em 8 de julho de 1958, o New York Times escreveu : “Um psicólogo mostra um embrião de um computador projetado para ler e se tornar mais sábio. Desenvolvido pela Marinha ... o computador de US $ 704, que custa US $ 2 milhões, aprendeu a distinguir entre esquerda e direita após cinquenta tentativas ... Segundo a Marinha, eles usam esse princípio para construir a primeira máquina pensante da classe Perceptron, que pode ler e escrever; o desenvolvimento está previsto para ser concluído em um ano, com um custo total de US $ 100.000 ... Os cientistas prevêem que mais tarde os Perceptrons poderão reconhecer as pessoas e chamá-las pelo nome, traduzir instantaneamente fala oral e escrita de um idioma para outro. Rosenblatt disse que, em princípio, é possível construir "cérebros" que possam se reproduzir na linha de montagem e que tenham consciência de sua própria existência "(citado e traduzido do livro por S. Nikolenko," Aprendizado profundo, imersão no mundo das redes neurais ").
Ah, esses jornalistas sabem como intrigar. É muito interessante descobrir o que realmente é uma máquina pensante da classe Perceptron.
Classificação binária (binária) de objetos, neurônio artificial da classe Perceptron
Aqui está o nosso neurônio artificial, ele divide os objetos em duas classes (executa a classificação binária dos objetos):

Então nós temos:
- Entrada: objeto de amostragem - vetor espacial m-dimensional x = ( x 1 , . . . , x m )
- Pesos w = ( w 1 , . . . , w m ) um para cada recurso do objeto de amostra (também um vetor m-dimensional)
- Dentro: adicionador S L M = w 1 x 1 + . . . + w m x m = s u m m j = 1 w j x j - soma ponderada de entradas de neurônios
- Próximo: ativação Φ(x,w)=Φ(SUM)
- Ainda mais: quantizador (limiar) - θ [theta]
- Ativação + limiar - previsão do rótulo da classe de um objeto com base na soma ponderada de entradas de neurônios (atributos do objeto). Esta parte define a arquitetura específica do neurônio.
- Saída: rótulo da classe de objeto (um de dois) \ hat {y} = \ {1, -1 \}
Classificação - porque um neurônio atribui uma classe a um objeto, binário ( binário ) - porque existem apenas duas classes possíveis.
haty [game with a cover] - indicaremos o valor de classe previsto (calculado) para o objeto x
y [jogo regular sem tampa] - valores de classe verdadeiros (conhecidos) para um objeto x do conjunto de treinamento.
Valores x (a seguir x e w - estes não são valores unitários, mas vetores) variam de objeto para objeto, coeficientes de peso w (uma vez selecionado) permanecem inalterados. Para o conjunto de treinamento para cada objeto x rótulo de classe conhecido y . Na fase de treinamento, você precisa escolher pesos w para que o modelo produz o valor correto haty (coincidindo com y ) para o número máximo de objetos no conjunto de treinamento. A suposição da utilidade de um neurônio treinado dessa maneira é baseada na esperança de que ele produza o valor correto com os coeficientes selecionados haty para novos objetos x valor verdadeiro da classe y pelo qual não é conhecido antecipadamente.
O significado intuitivo da soma ponderada das entradas de um neurônio é que todos os atributos de um objeto (cada um dos sinais é uma das entradas de um neurônio) afetam o resultado da classificação do objeto, mas nem todos os sinais são igualmente afetados. Até que ponto - determine o peso; zerar um certo coeficiente de ponderação anula a contribuição do atributo correspondente à quantidade total, ou seja, isso equivale a remover o recurso do objeto.
Neurônio Linear Adaptativo ADALINE
O neurônio ADALINE (neurônio linear adaptativo) é um neurônio artificial comum com esta função de ativação:
Φ(x,w)=Φ(SUM)=SUM
Phi(x(i),w)= Phi( summj=1wjx(i)j)= summj=1wjx(i)j
A seguir, sobrescrito i entre parênteses indicará i elemento do conjunto de treinamento x(i) ou valor de classe verdadeiro y(i) ou valor de classe previsto haty(i) para ele
Podemos dizer que esse neurônio simplesmente não possui uma função de ativação e o valor da soma ponderada de entradas é alimentado na entrada do quantizador (limiar). Mas, por consistência, será mais conveniente supor que o valor da soma ponderada seja tomado como ativação.
Limite (quantizador) - prevê um rótulo de classe:
\ hat {y} ^ {(i)} = \ left \ {\ begin {matrix} 1, \ Phi (x ^ {(i)}, w) \ ge \ theta \\ - 1, \ Phi (x ^ {(i)}, w) <\ theta \ end {matrix} \ right.
Se o valor de ativação for maior que algum valor limite θ [theta], o quantizador atribuirá o rótulo "1" ao objeto; se o valor de ativação for menor que o limite θ, o objeto receberá o rótulo "-1".
Aqui podemos formular o problema em uma primeira aproximação : precisamos selecionar os parâmetros do neurônio
- fatores de ponderação wj,j=1,..,m
- e limiar θ [teta]
para que os valores da classe haty , que o neurônio atribui aos objetos da amostra de treinamento, coincidiu com os valores reais das classes y para os mesmos elementos (ou, pelo menos, deu o significado correto para a maioria).
Transformamos um pouco a função de limite, consideramos a classe haty=1 e transfira o limiar para o lado esquerdo da desigualdade:
beginreunido Phi(x(i),w) ge theta hfill somamj=1wjx(i)j ge theta hfill− theta+ summj=1wjx(i)j ge0 hfill endreunidos
denotar w0=− theta e x0=1
beginreunidow0x(i)0+ summj=1wjx(i)j ge0,w0=− theta,x0=1 hfill summj=0wjx(i)j ge0,x0=1 hfill endreunido
Como vemos, conseguimos nos livrar de um parâmetro separado θ, introduzindo-o sob o disfarce de um novo coeficiente de peso w0 sob o sinal da soma, enquanto adiciona à descrição do objeto um novo sinal de unidade fictícia x0=1 .
Vamos corrigir a formulação do problema, levando em consideração a nova notação.
Tarefa ' : selecione os parâmetros dos fatores de ponderação dos neurônios wj,j=0,..,m ,
x0=1 (constante de sinal) - neurônio fictício ( neurônio de deslocamento )
A partir deste local, numeramos os sinais e pesos c 0, e não 1. Sobre o vetor w diremos que é sobre (m + 1) -dimensional, e não m-dimensional. Vetor x dependendo do contexto, podemos considerar (m + 1) -dimensional (na maior parte das vezes em fórmulas), mas lembre-se de que é de fato m-dimensional.
Por que um neurônio ( no nosso caso, no entanto, não é um neurônio, mas um sinal de um objeto ou apenas uma entrada, mas no caso de uma rede multicamada, ele se transforma em um neurônio e é geralmente chamado dessa maneira ) é fictício - está claro agora. Por que ele também o deslocamento ficará claro mais tarde.
A ativação com a soma ficará agora assim:
Phi(x(i),w)= Phi( summj=0wjx(i)j)= summj=0wjx(i)j,x(i)0=1 foralli
O limite agora é sempre 0 (zero) (o valor real movido para o parâmetro w0 ):
\ hat {y} ^ {(i)} = \ left \ {\ begin {matrix} 1, \ Phi (x ^ {(i)}, w) \ ge 0 \\ - 1, \ Phi (x ^ {(i)}, w) <0 \ end {matriz} \ direita.
Mais uma vez, formulamos o problema em outras palavras (o significado geométrico do problema)
Se observarmos cuidadosamente a fórmula da função de ativação, veremos que é um hiperplano paramétrico no espaço dimensional (m + 1), enquanto nas primeiras m dimensões ele coexiste com os pontos dos elementos da amostra e (m + 1) - A dimensão eletrônica é o espaço de valores da função, separado dos elementos.
Agora, se equipararmos o valor de ativação a zero (valor limite), este também será um hiperplano, apenas já no espaço m-dimensional, ou seja, completamente no espaço de valor do elemento x . Este hiperplano separará os elementos. x em dois grupos disjuntos.
Normalmente, nesse local, eles dizem que nossa tarefa é selecionar os valores dos parâmetros w , ou seja, construa um hiperplano m-dimensional no espaço de elementos para que os elementos do conjunto de treinamento com o valor verdadeiro da classe "1" fiquem de um lado do plano e os elementos com a verdadeira classe "-1" do outro.
Para quem não entende bem o que está escrito aqui, continue a ler - agora todos veremos, isso é o primeiro. Em segundo lugar, também veremos que essa afirmação do problema, embora válida, não está totalmente completa.
Espaço unidimensional (m = 1)
É aqui que o código começa a aparecer. Construímos todos os gráficos com a biblioteca Matplotlib usual, mas aqui também uso a biblioteca Seaborn em uma linha para ajustar a área do gráfico, porque Eu gosto de como ela faz isso, mas em princípio você pode ficar sem ela.
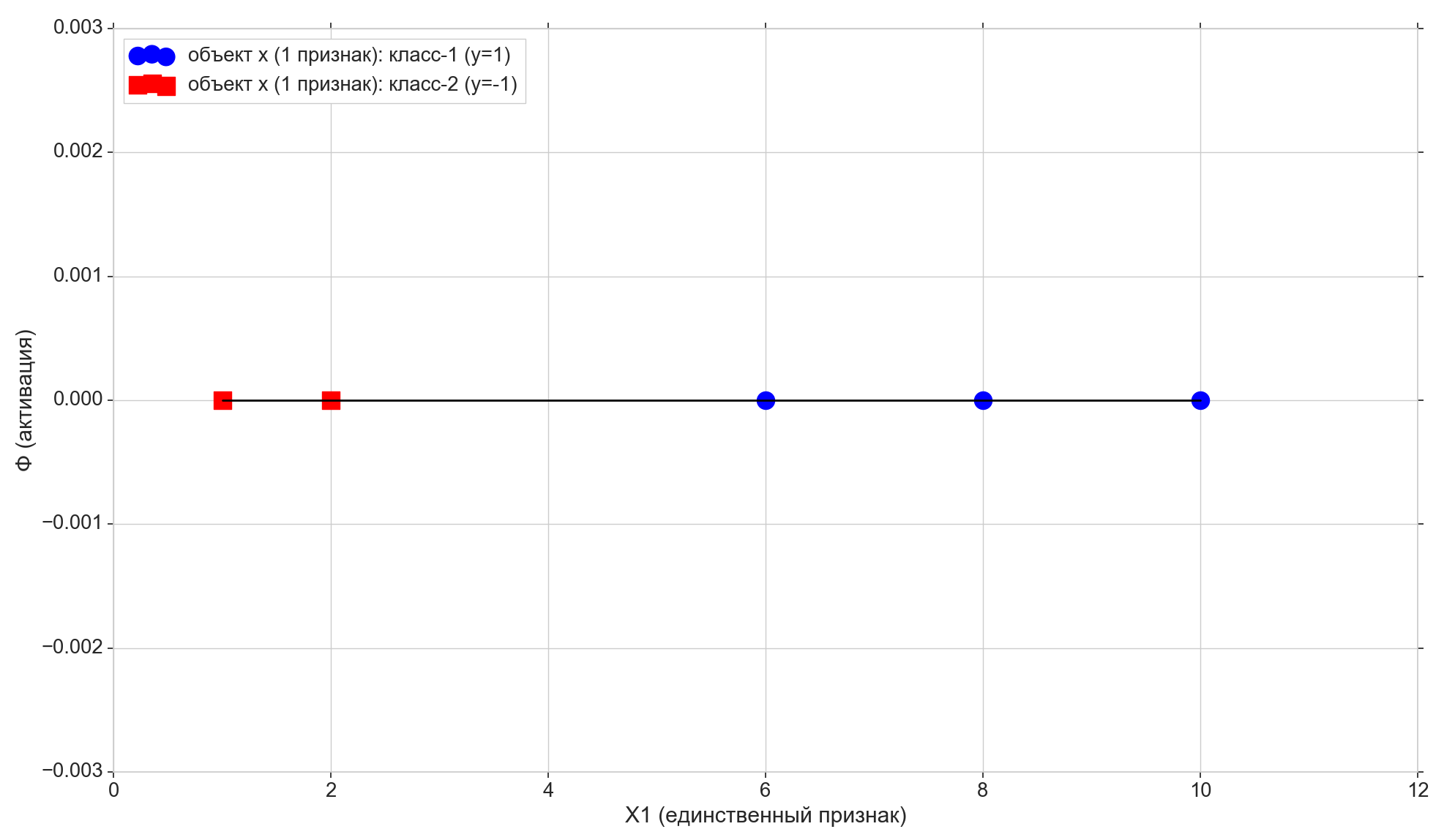
Tomamos muitos pontos unidimensionais e respostas para eles:
import numpy as np import math
Aqui temos cada i-ésimo elemento da matriz X1 - este é o i-ésimo elemento (i-ésimo ponto) da amostra de treinamento (mais precisamente, seu primeiro e único atributo): x(i)=(X1[i]) , x(i)1=X1[i]
Cada i-ésimo elemento da matriz y é a resposta correta, um rótulo verdadeiro correspondente ao i-ésimo elemento da amostra de treinamento com um único atributo X1 [i].
Tomamos apenas 5 pontos, os dois primeiros são atribuídos à classe "-1", os três restantes são atribuídos à classe "1".
Desenhe estes pontos na linha:
Agora vamos ver a função de ativação:
Phi=w0+w1x1
Como você pode ver, esta é uma linha paramétrica comum no plano (no espaço bidimensional, ou seja, (m + 1)):
- no eixo horizontal, temos os pontos dos elementos (eles também são os valores do atributo X1)
- na vertical - valores de ativação para cada elemento
- parâmetro w1 - define o ângulo de inclinação,
- mas w0 - mude ao longo do eixo vertical (aqui está a resposta para o neurônio de cisalhamento ).
w0 = -1.1 w1 = 0.4

Lembre-se também de que, após uma pequena conversão, nosso limite de ativação passou a zero. Portanto, se a projeção do i-ésimo elemento na linha de ativação for menor que zero, atribuímos a classe -1 ao elemento ( haty=−1 ), se for maior que zero, atribuímos a classe "1" ( haty=1 )
Ponto roxo - interseção da linha de ativação com o eixo Phi=0 , separando elementos de diferentes classes, esse é o hiperplano de separação (para o espaço unidimensional, o ponto é o hiperplano) construído no espaço de recurso unidimensional (ou seja, m-dimensional). Como você pode ver, para dividir os elementos em grupos, basta; mas, para atribuir classes a grupos, não é mais suficiente. Para atribuir classes a elementos, precisamos de uma ativação direta (hiperplano bidimensional), construída no espaço "m + 1) -d" "sinais + ativação": a direção do desvio de ativação da vertical O eixo determinará a classe para grupos de elementos, porque depende se as projeções dos elementos na ativação são maiores ou menores que zero.
Alteração de parâmetros w0 e w1 receberemos diferentes linhas de ativação. Precisamos construir uma linha de ativação, ou seja, encontre essa combinação de parâmetros w em que a projeção dos dois primeiros pontos da amostra de treinamento na linha de ativação está abaixo de zero (para eles, o valor haty=y=−1 ) e a projeção dos 3 pontos restantes será acima de zero (para eles haty=y=1 )
É bastante óbvio que, no nosso caso particular, não há nada complicado na construção de uma linha; além disso, essas linhas geralmente podem ser construídas em um número infinito. Mas tentaremos construí-lo de tal maneira que algum critério de otimização seja atendido (pode afetar a qualidade de previsões futuras), além disso, deve haver a capacidade de estender o algoritmo para o caso multidimensional.
Aqui também observamos que selecionamos especificamente o conjunto inicial de pontos para que ele possa ser dividido por uma linha (para 1-e: todos os elementos do primeiro grupo são menores, todos os elementos do segundo grupo são maiores que algum valor fixo), ou seja, muitos pontos de treinamento são linearmente separáveis .
Adicione mais duas linhas horizontais ao gráfico correspondente às classes {1, -1} e projete os elementos nelas.

Pontos com o projeto da classe "-1" para o resultado final Phi=−1 , aponta com o projeto da classe "1" para a linha superior Phi=1 .
Vamos prestar atenção a mais uma pequena nuance. Traçamos os valores de ativação ao longo do eixo vertical, o espaço dos valores de ativação é contínuo. Mas o resultado do classificador (a função de ativação passada pelo limite) é um conjunto discreto de dois elementos {-1, 1}, e não uma escala contínua. Aqui tomamos um conjunto discreto de classes y e colocá-lo em uma escala de ativação contínua Phi para que valores discretos de classe se tornem pontos comuns na escala de ativação - casos especiais de valores de ativação que eles podem aceitar ou aproximar diretamente perto o suficiente deles. Estritamente falando, poderíamos inicialmente não pegar os valores numéricos como classes, mas os rótulos de string "class-1" e "class-2"; nesse caso, teríamos que corresponder os rótulos de string aos valores numéricos na escala de ativação. Portanto, no nosso caso, os valores das classes "-1" e "1" devem ser considerados não como rótulos de classe, mas como um mapeamento de classes marcadas para a escala de ativação.
É hora de inserir a métrica de erro

É natural aceitar que quanto mais próximo o valor de ativação do elemento selecionado estiver do valor da classe para o mesmo elemento, melhor será a previsão da classe de ativação para esse elemento. Portanto, para o erro do elemento selecionado, é possível calcular a distância entre os pontos - a projeção vertical do elemento na linha de ativação e a projeção do elemento na linha horizontal de sua classe conhecida (verdadeira). No gráfico: erros - linhas verticais em laranja.
Função de custo (perda)
Temos uma métrica de erro para cada item individual. Podemos obter uma métrica de qualidade para toda a linha de ativação. É bastante natural aceitar, por exemplo, que quanto menor a soma dos erros de todos os elementos da amostra de treinamento, melhor construímos uma linha de ativação. Para cada elemento individual, o erro não será mínimo, mas para toda a amostra de treinamento como um todo, é possível obter algum comprometimento.
Mas você não pode receber uma soma simples de erros, mas a soma dos erros ao quadrado ( soma dos erros ao quadrado, soma dos erros ao quadrado, SSE ). É bastante óbvio que, como no caso da soma dos erros comuns, quanto mais próxima a linha de ativação estiver dos pontos com classes reais de elementos, menor será a soma dos erros quadráticos, mas no caso de um erro quadrático, os elementos mais remotos receberão uma penalidade mais severa.
De fato, o que nos interessa aqui não é o tamanho da multa para elementos distantes, mas o fato de a função quadrática ter um mínimo e ser diferenciável em qualquer lugar (a soma usual terá um mínimo, mas nesse mínimo não será diferenciável), veja por que isso é necessário. um pouco depois.
Então:
- Erro - distância do valor do rótulo da classe ao hiperplano de ativação
- SSE - a soma dos erros quadráticos de todos os elementos da amostra de treinamento
- Função de custo J(w) - métrica de qualidade para a linha de ativação selecionada. Quanto menor o valor, melhor a ativação.
Tome em função do valor 1 maisde2 SSE, no caso geral de um neurônio linear, terá a seguinte aparência:
beginreunidoJ(w)=1 over2SSE=1 over2 sumni=1( Phi( sum)j=0mwjx(i)j)−y(i))2=1 over2 sumni=1( summj=0wjx(i)j−y(i))2 endreunido
( 1 maisde2 em primeiro lugar, não interfere no SSE e, em segundo lugar, por conveniência - será muito mais reduzido)
Aqui i - número do elemento e n - o número de elementos no conjunto de treinamento. Deixe-me lembrá-lo que y(i) - verdadeira classe i elemento da amostra de treinamento, ou seja, resposta correta bem conhecida com antecedência.
Como lembramos, a posição da linha de ativação é determinada pelos parâmetros - fatores de ponderação w portanto vector w atua como um parâmetro da função de perda.
Para estojo unidimensional
J(w)=1 over2SSE=1 over2 sumni=1(w0+w1x(i)1−y(i))2
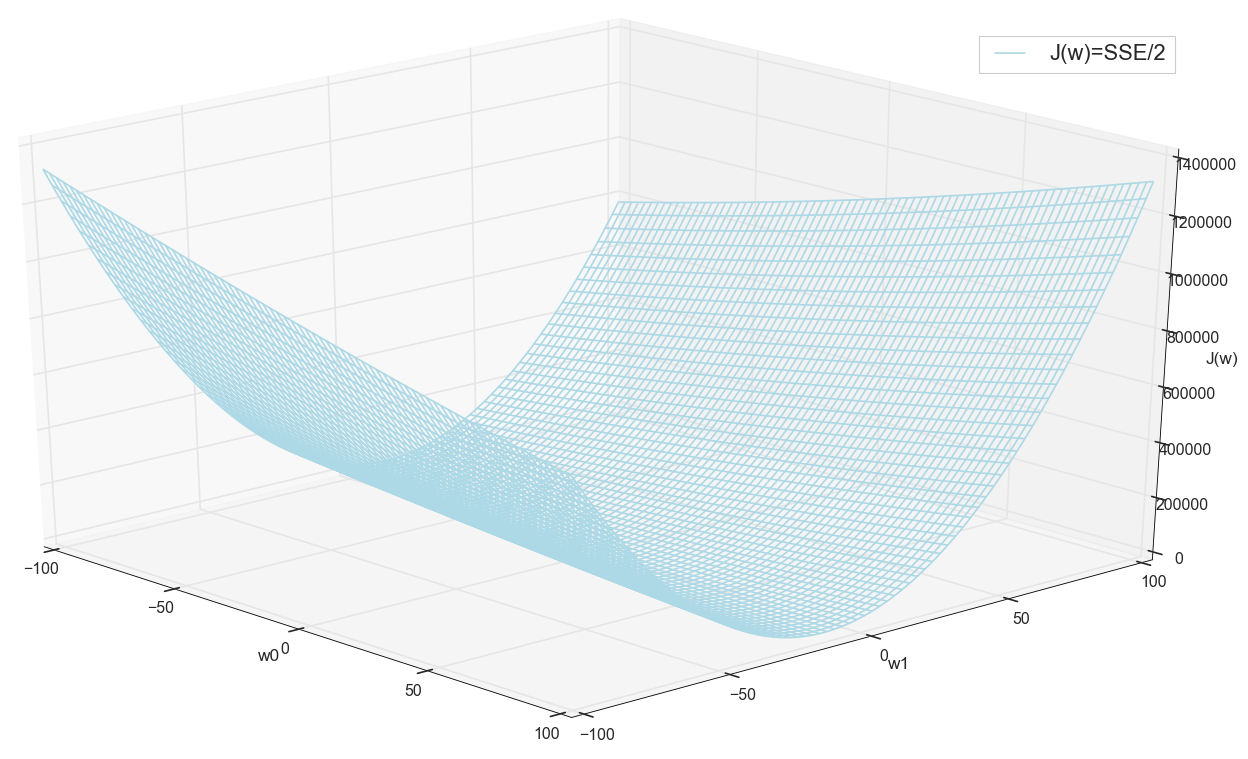
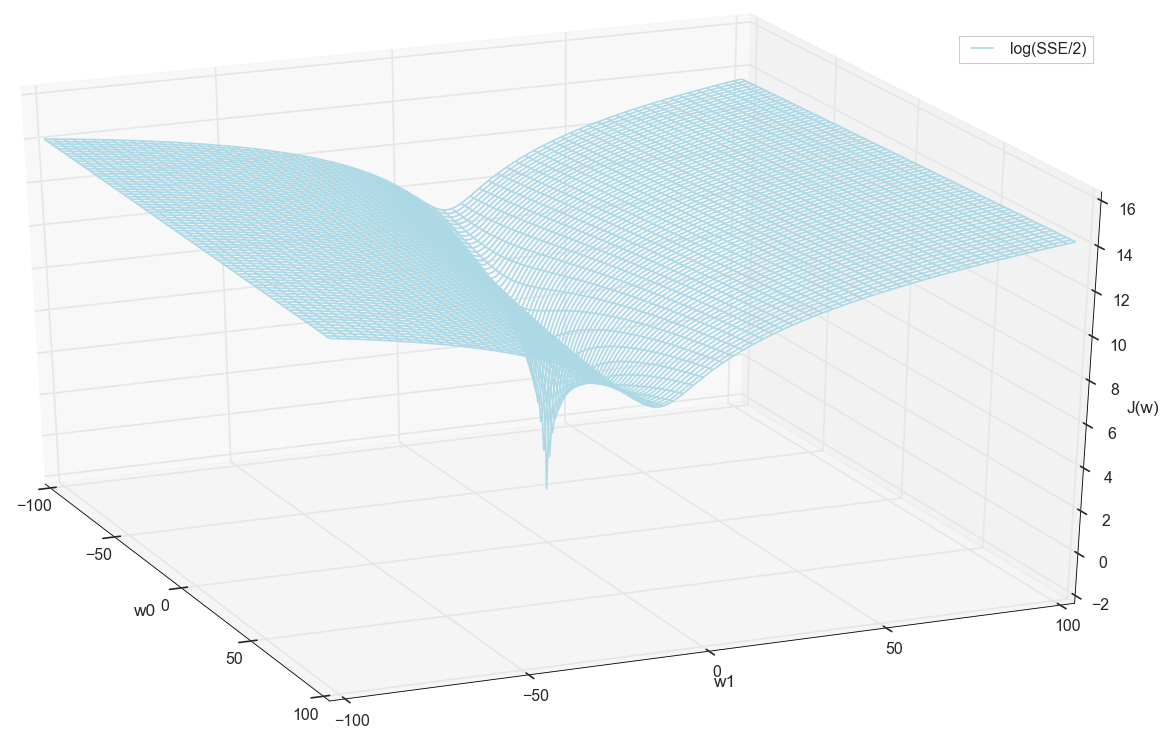
Valores x e y são conhecidos antecipadamente (este é um conjunto de treinamento); portanto, eles são corrigidos. Nós selecionamos os parâmetros w , ou seja, w0 e w1 para que o valor J(w) Acabou sendo mínimo. Vamos tentar plotar o gráfico como um valor J(w) depende dos parâmetros w0 e w1

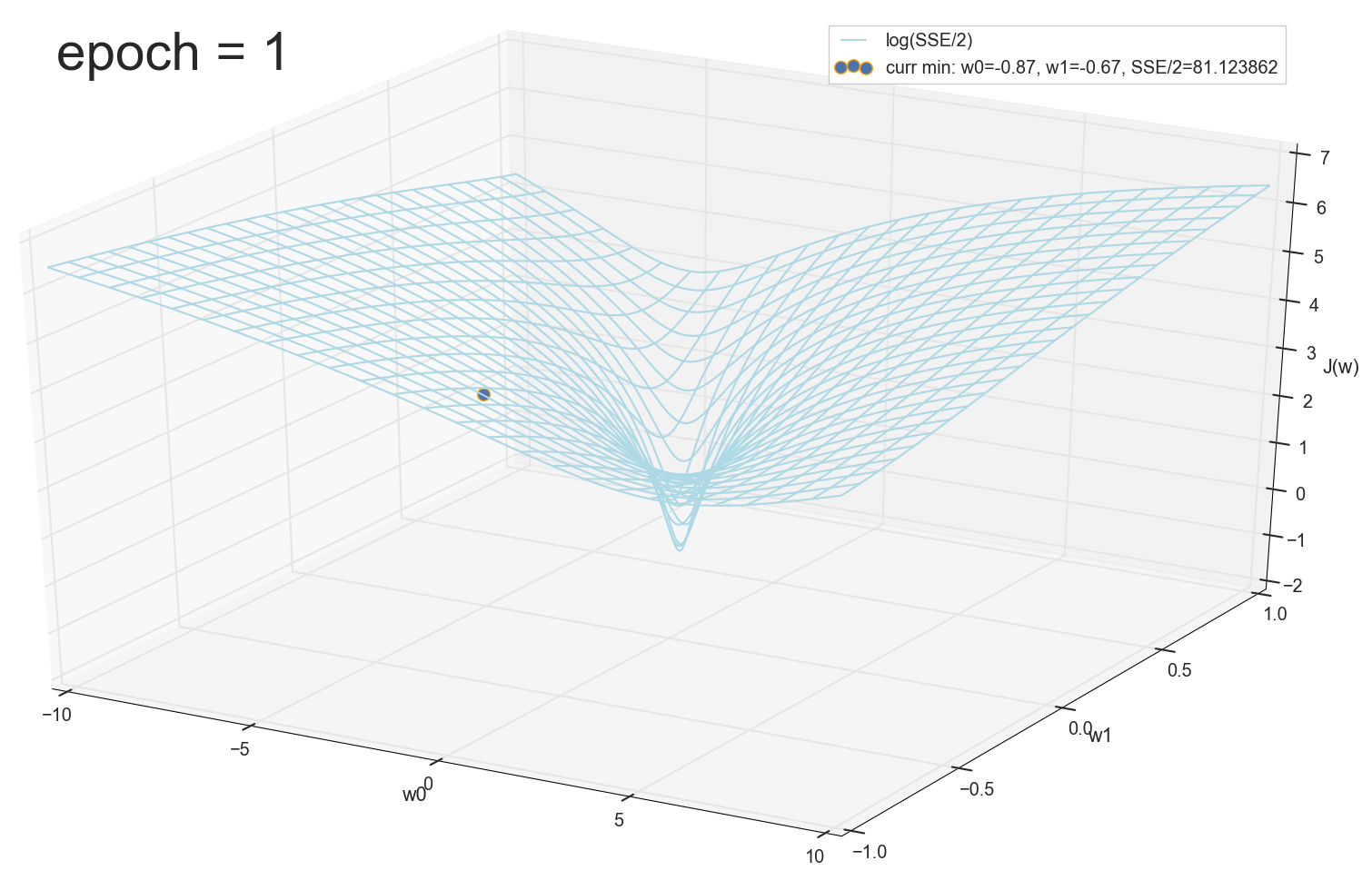
Em geral, já é visível aqui que a função de perda tem um mínimo e onde está localizada aproximadamente. Mas vamos fazer mais um truque e criar o mesmo gráfico, apenas com uma escala vertical logarítmica .

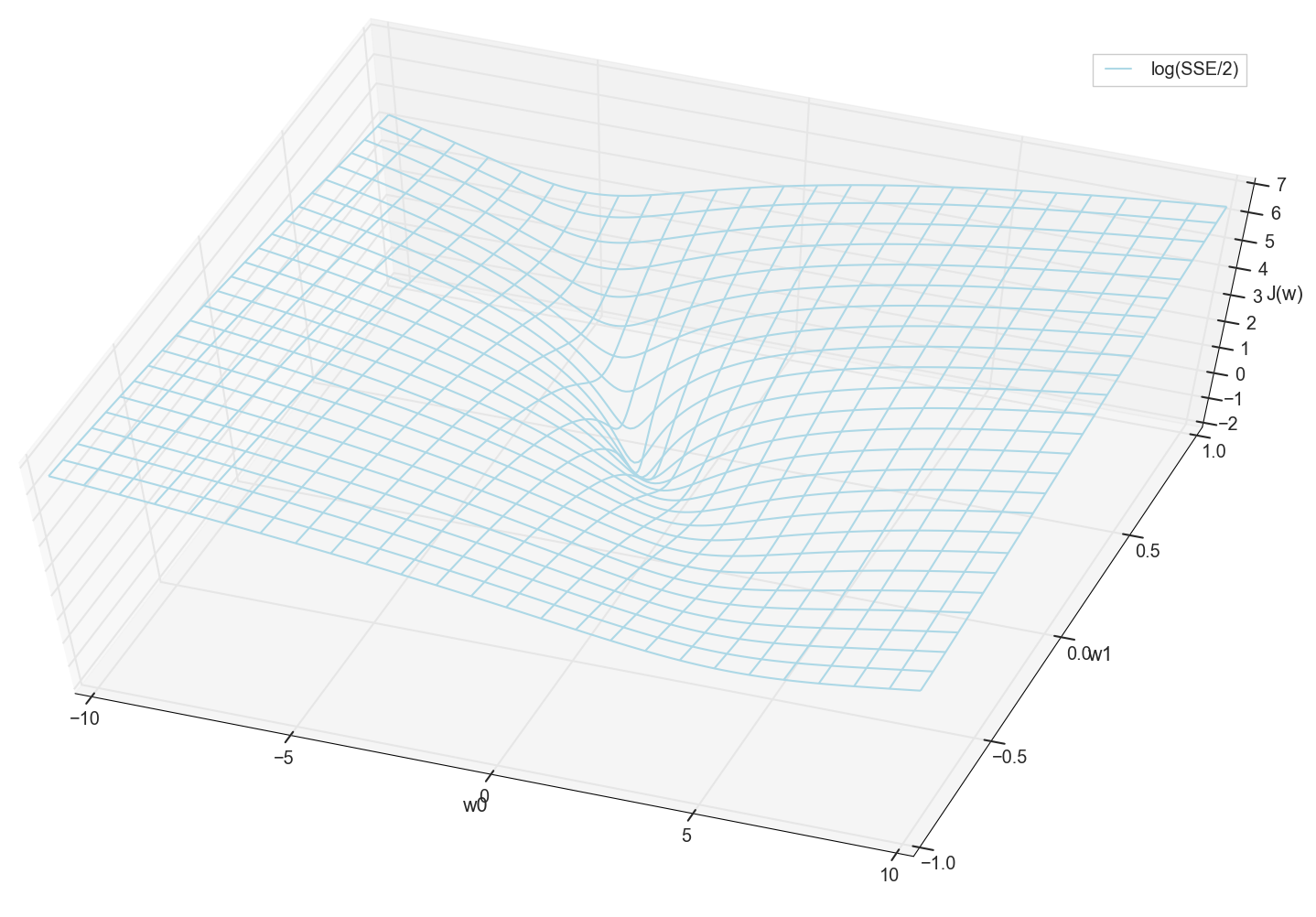
Não conheço você, mas pessoalmente, quando vi esse gráfico pela primeira vez, experimentei iluminação. Essa cavidade natural não é apenas uma visualização figurativa de colinas multidimensionais de um artigo popular sobre redes neurais, é um gráfico real.
Nossa tarefa é selecionar esses valores w0 e w1 para chegar ao fundo deste poço. Obtemos os valores dos pesos - obtemos um neurônio treinado.
Como todos plotamos um gráfico e observamos pessoalmente seu mínimo, ninguém nos proibirá de encontrar suas coordenadas por uma simples enumeração na grade "manualmente":

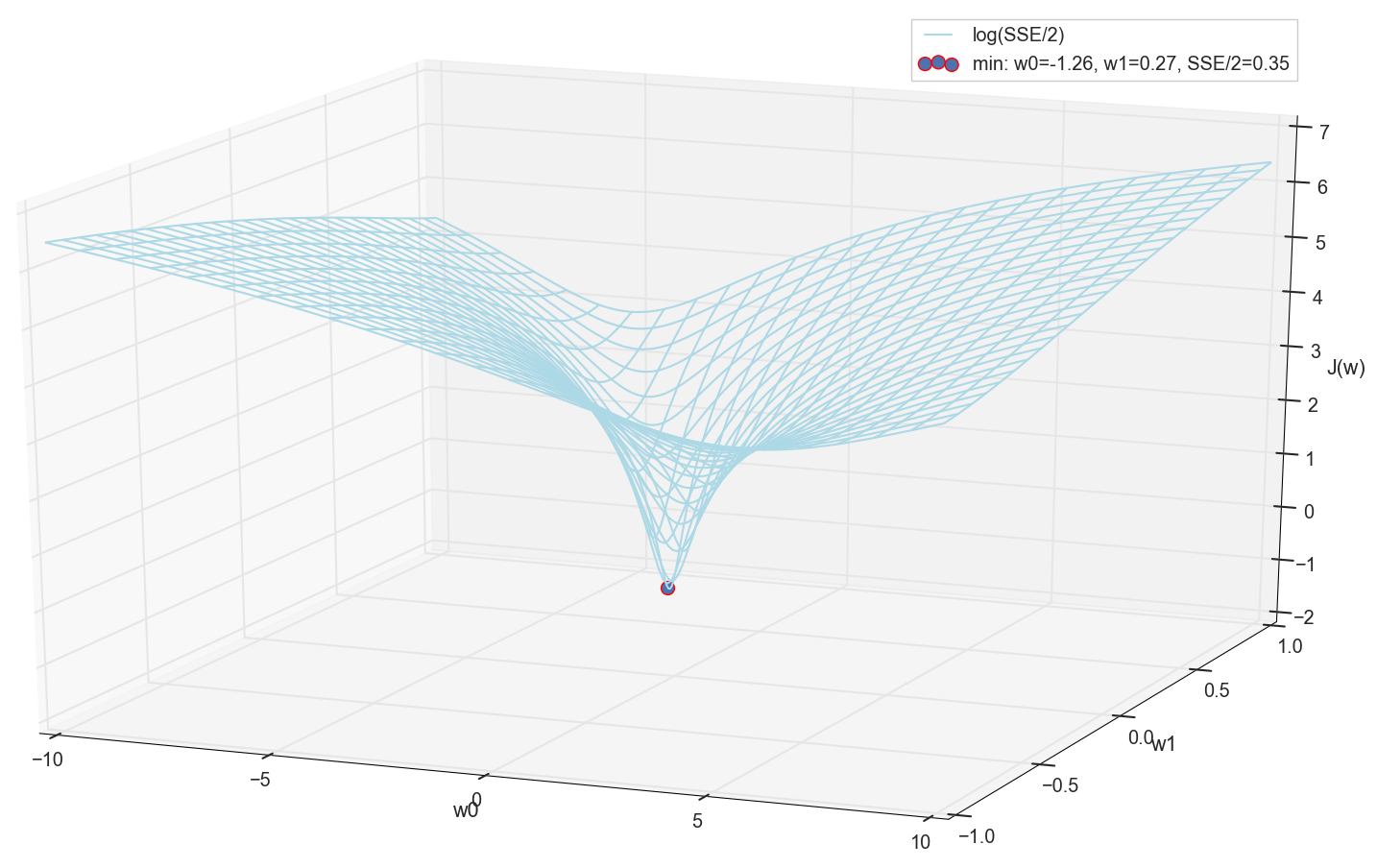
Estes são os valores: w0=−1,26 e w1=0,27 , a soma dos erros quadrados do SSE é 0,69, a função de custo J(w)=SSE/2=0,35 (mais precisamente: 0.3456478371758288).
Vamos ver como a ativação se parece com estes parâmetros:

Quanto a mim, é bastante normal. O ponto de interseção da ativação com um limite zero separa elementos de diferentes classes e a própria ativação atribui a eles os valores corretos. Ao mesmo tempo, a ativação parece estar em uma posição ideal.
Antes de prosseguir, admiramos novamente o gráfico na grade:
Parece que não há outros pontos baixos por perto que pensariam.
Pesquisa mínima
Então, temos pesos - as coordenadas do valor mínimo de erro. Esse será o valor ideal dos pesos na amostra de treinamento. De um modo geral, é exatamente disso que precisamos, podemos dizer que o neurônio é treinado. Talvez isso possa ser concluído?
Procure um mínimo: procure por grade
- A opção à primeira vista é bastante funcional (como vemos)
- Você precisa conhecer com antecedência a área em que procurar um mínimo (você pode fazer bordas muito grandes e restringir a área de pesquisa - isso é apenas a olho nu)
- Para aumentar a precisão, você precisa diminuir o passo → ainda mais pontos (solução: você pode restringir iterativamente a área de pesquisa)
- Demasiados pontos (para 2D, pode ser bom, mas para casos multidimensionais, encontramos recursos muito rapidamente)
- Para MNIST (28x28 = 784 pixels - o mesmo número de entradas, os mesmos fatores de ponderação mais o deslocamento, uma grade de 100 etapas por dimensão): 100 ^ 785 = 10 ^ 1570.
Portanto, se queremos treinar um único neurônio (nem mesmo uma rede neural) em uma imagem de 28x28 = 784 pixels, procurando um mínimo por enumeração direta em uma grade de 100 pontos para cada medição, precisamos ordenar 10 ^ 1570 combinações. Isso é bastante para armazenamento e pesquisa (na parte visível do Universo existem apenas 10 ^ 80 átomos, o Universo existe por cerca de 4 * 10 ^ 17 segundos = 4 * 10 ^ 26 nanossegundos).
Vamos tentar encontrar uma opção mais rapidamente.
Pesquisa mínima: descida de passo constante
Vejamos o gráfico da função de perda J(w) no avião: conserte w0 mudar w1
def sse_(X, y, w0, w1): return ((w0+w1*X - y)**2).sum()
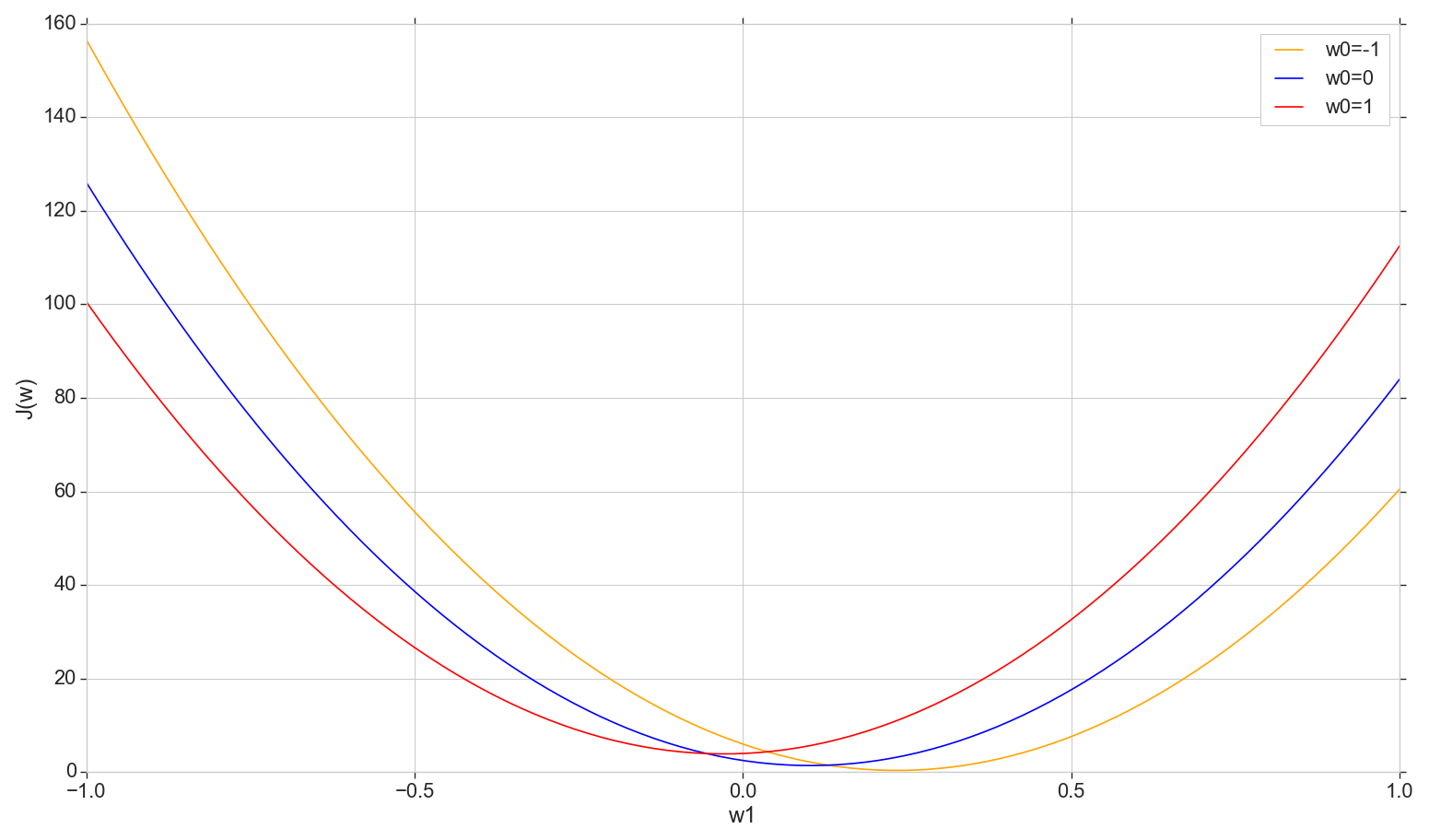
Essa é uma parábola comum (mais precisamente, uma família de parábolas - elas diferem um pouco dependendo do tipo de valor fixado w0 ) Para encontrar a parábola mínima, não é necessário classificar todos os pontos. Podemos escolher um ponto arbitrário no eixo horizontal e avançar em direção ao mínimo com alguns passos.
Considere uma opção de afinação constante
- Se a etapa for muito grande, você poderá errar e não atingir o mínimo (a etapa pode ser reduzida)
- Se for muito pequeno, haverá muitas etapas (mais do que poderia ser)
- De qualquer forma, não atingiremos o mínimo exato, mas podemos alcançá-lo com precisão arbitrária alterando a etapa próxima ao mínimo impreciso encontrado (a etapa deixa de ser constante)
- Não sabemos a direção da descida (é possível resolver algoritmicamente: não pise na direção do aumento do erro)
- O problema de encontrar o intervalo foi resolvido (você pode diminuir de qualquer lugar - mais cedo ou mais tarde, diminuiremos de qualquer maneira)
- Em princípio, a opção está funcionando, mas talvez haja uma opção melhor?
Nota: quando falei sobre essa opção de descida para uma palestra, um aluno perguntou por que você precisa seguir algumas etapas se consegue encontrar imediatamente uma parábola mínima usando a fórmula? Inicialmente, respondi algo no espírito que agora estamos interessados em considerar a opção de iteração, para que possamos usá-la mais tarde, não apenas com uma parábola, mas também em outras situações. Além disso, na verdade, não precisamos de pelo menos uma parábola específica nesta seção - passaremos para o mínimo, não em uma dimensão, mas em todas as dimensões de tal maneira que, a cada nova iteração, uma nova etapa ocorra não ao longo dessa parábola, mas em parábola com uma nova fatia com um valor alterado w0 . Mas, pensando mais tarde, pensei que, em princípio, não há nada errado se avançarmos a cada fatia, não em etapas, mas rolamos imediatamente para o mínimo da fatia atual. Então, vez após vez, medida por medida, ainda temos que deslizar para um mínimo global e parece mais rápido que as etapas. Para um único neurônio, ele deve funcionar, e não apenas com uma parábola. Mas ainda não comecei a perder tempo testando essa teoria, então aqui apenas seguimos em frente - prometi falar sobre a descida do gradiente.
Procure um mínimo: descida de gradiente
Em geral, descemos os degraus, mas fazemos com mais inteligência. Usamos a derivada da curva de custo para selecionar a etapa (aqui, não a curva de custo , mas a curva de custo ).
- Temos várias dimensões e cada uma delas tem sua própria curva: consertamos tudo wj exceto wk ,
- J(semana haverá uma curva de erro em k th dimensão
- Todos eles são (no nosso caso) parábolas, mas, de um modo geral, é importante que sejam diferenciáveis em todos os lugares e tenham um mínimo
- Para ajustar a etapa de cada medição, usaremos a derivada parcial da função de erro com relação a essa medida (um coeficiente variável wk )
- Um vetor de tais derivadas parciais é chamado de gradiente.
Tudo isso é bom, mas de onde vem o derivado? Agora vamos descobrir.
O significado geométrico da derivada
Para mim, a derivada por muito tempo permaneceu um conjunto de fórmulas e regras especiais para seu cálculo, além de algo sobre aumento, diminuição e extremos. Aqui será apropriado recordar ou descobrir qual é realmente o derivado.
Função derivada y(x) neste ponto x0 É o limite da razão do incremento da função Deltay ao incremento de argumento Deltax ao incrementar um argumento Deltax tendendo a zero:
y′(x0)= lim Deltax a0 Deltay sobre Deltax, Deltay=y(x0+ Deltax)−y(x0)

O ponto na imagem M(x0,y(x0))=(x0,y0) É o ponto em que queremos determinar a derivada. Ponto N(x0+ Deltax,y(x0+ Deltax))=(x0+ Deltax,y0+ Deltay) - ponto obtido incrementando o argumento Deltax . Direto Mn - secante passando por esses dois pontos.
Ponto A - interseção de secante Mn com eixo horizontal y=0 .
Considere dois triângulos retângulos: um triângulo triânguloNPM com seção secante Mn como uma hipotenusa e um triângulo triânguloMBA com a continuação da secante ao eixo y=0 - segmento AM como uma hipotenusa. No curso de gráfico e geometria da escola, é óbvio que os ângulos angleNMP e angleMAB são iguais e, portanto, suas tangentes são iguais:
tan angleMAB= tan angleNMP=MB overAB=NP overMP= Deltay sobre Deltax
Adicione à imagem: MD - tangente à curva inicial no ponto M cruza um eixo y=0 no ponto D . Triângulo triânguloMBD - um triângulo retângulo com hipotenusa - seção cassete, segmento MD .
Visamos o incremento Deltax para zero:
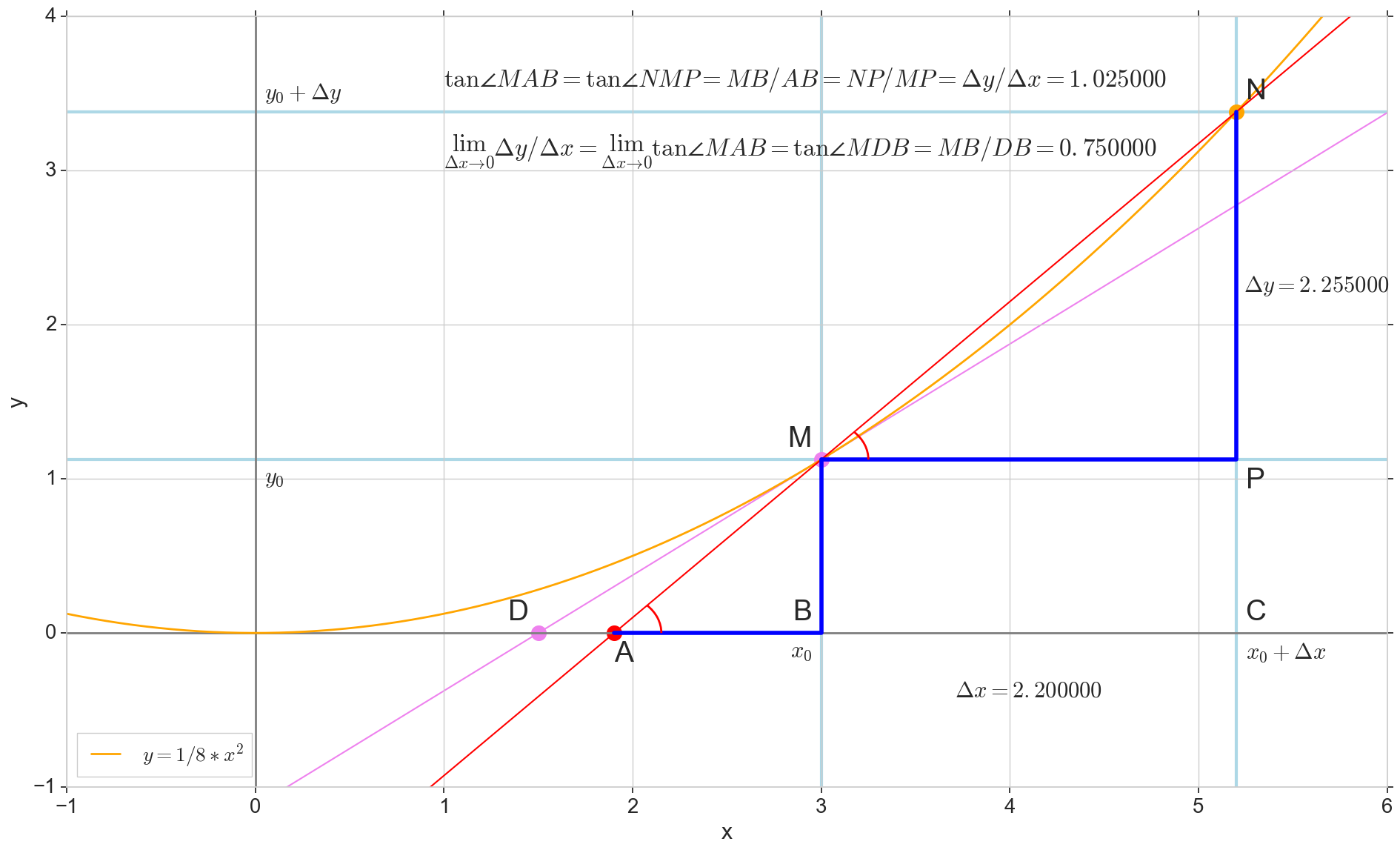
Ponto N movendo-se para o ponto M por função, ponto A arrasta-se a um ponto D ao longo do eixo y secante Mn se transforma em uma tangente MD com ponto de contato M . Triângulo de origem triânguloNPM com pernas Deltax e Deltay encolhe até certo ponto, mas um triângulo como esse triânguloMBA se transforma em um triângulo triânguloMBD preservando não apenas as dimensões macroscópicas, mas também a igualdade de ângulos angleMAB e angleNMP .
Como incremento Deltax , aproximando-se infinitamente de zero, nunca chegará a zero, então o ponto N nunca chegue ao local exato M apontar A não chegará ao ponto D triângulo triânguloMBA não vai se transformar triânguloMBD . , , «» lim .
△MBA — △MBD , :
limΔx→0ΔyΔx=limΔx→0tan∠NMP=limΔx→0tan∠MAB=limΔx→0MBAB=MBDB=tan∠MDB
:
limΔx→0ΔyΔx=tan∠MDB
, , :
y′(x0)=limΔx→0ΔyΔx=tan∠MDB
, y=0 . .
, , , , , . , , , , .. ( , , ). : , (, — tangent line , , — ).
:
- x0 y=0
- — y(x0) — x0 y=0 y=0
- «» , ,
- — : — , —
- ( , , , Δy )
, , :

— , — x0 , — . — — . — y=0 , — .

, , , , . ( , ) (: y=0 , ).

( ): , (: y=0 , ).
, : (), «»/«» , . — . , , ? .
J(w) . , , , .
J(w)=12SSE=12n∑i=1(m∑j=0wjx(i)j−y(i))2
∂J(w)∂wk=∂∂wk12n∑i=1(m∑j=0wjx(i)j−y(i))2=12n∑i=1∂∂wk(m∑j=0wjx(i)j−y(i))2=12n∑i=12(m∑j=0wjx(i)j−y(i))∂∂wk(m∑j=0wjx(i)j−y(i))=122n∑i=1(m∑j=0wjx(i)j−y(i))∂∂wk((w0x(i)0+...+wkx(i)k+...+wmx(i)m)−y(i))=n∑i=1(m∑j=0wjx(i)j−y(i))x(i)k
, : , , , ( ) . , wk ( , ), . , , , 1/2 SSE .
:
∂J(w)∂wk=n∑i=1(m∑j=0wjx(i)j−y(i))x(i)k
— ( ∇ [], , .. []):
∇J(w)=(∂J(w)∂w0,...,∂J(w)∂wm),w=(w0,...,wm)
:
w:=w+Δw,Δw=−η∇J(w)
k - :
wk:=wk+Δwk,Δwk=−η∂J(w)∂wk
:
, , , . , .
1- :
Φ(x,w)=w0+w1x1
( ):
∂J(w)∂w0=n∑i=1(w0+w1x(i)1−y(i))x(i)0=n∑i=1(w0+w1x(i)1−y(i))
∂J(w)∂w1=n∑i=1(w0+w1x(i)1−y(i))x(i)1
:
Δw0=−η∂J(w)∂w0=−ηn∑i=1(w0+w1x(i)1−y(i))
Δw1=−η∂J(w)∂w1=−ηn∑i=1(w0+w1x(i)1−y(i))x(i)1
, . .
( w1 )
w0=1 , J(w1)
X ( ) y w0 e w1 ( ):
def sse_(X, y, w0, w1): return ((w0+w1*X - y)**2).sum()
w1 -1.5 1.5.
, ( , , ):
plt.subplot(3,1,1)

, , δJ(w)δw1 — :
grad_w1 = [] for i in range(len(w1)): grad = ((w0 + w1[i]*X1 - y)*X1).sum() grad_w1.append(grad) plt.subplot(3,1,3) plt.plot(w1, grad_w1, label=u' ∂J(w)/∂w1') plt.xlim(-1.2, 1.2) plt.xlabel(u'w1') plt.ylabel(u'∂J(w)/∂w1') plt.legend(loc='upper left')

Δw1(w1) (, Δw1 w1 , .. , ):
eta = 0.001 delta_w1 = [] for i in range(len(w1)): grad = ((w0 + w1[i]*X1 - y)*X1).sum() delta = -eta*grad delta_w1.append(delta) plt.subplot(3,1,2) plt.plot(w1, delta_w1, color='orange', label=u'Δw1, η=%s'%eta) plt.xlim(-1.2, 1.2) plt.xlabel(u'w1') plt.ylabel(u'Δw1=-η*∂J(w)/∂w1') plt.legend(loc='upper right')

plt.show()

- : ,
- : — «» ( , «» ),
- : — ( ), η [] ( ),
: , 1000 .
, ,
w — - - . w0=1 , w1=0.9 . η=0.001 ( , ) 12:
:
w1 J(w1,w0=1) :
Δw1(w1)
plt.scatter(w1_epochs, delta_w1_epochs, color='blue', marker='o', s=size_epochs, label=u' , η=%s'%eta) plt.plot([w1_epochs, w1_epochs], [delta_w1_epochs, np.zeros(len(delta_w1_epochs))], color='orange')

, , ( ), . , , , .
: , , , «» , — , .
- — w1 , —
- , w1
- — : , —
- , —
- , ( ), , ( ) — , —
- ( , — ).
- : — , —
- ? — . .
- . w1 , . , «»/«» . , , . , , , « ». , : w1=0.9 200, , , , 1. , , , . — η . , 200 1. η=0.001 , w1=0.9 200*0.001=0.2 ( -1, -0.2) — .
- J(w1=0.9)=92.43 , 12 (, ) J(w1=0.03)=8.54
- , ,
, . , . , ( , ). η , .
: , , , .
, , , .
η
- η [] — ()
- ,
- «»: , , ,
- , J(w)
- : wk , η , wk
η=0.01

. , . 3- , 3- , , .. , .. . , , [] .
η J(w) η

: , , . , — , , .
:

:

.
η . , , .

, .
:
, ( ) w , , . , , , . , , .
,
, .
, :

— :
12 — , :

50 :

1767 — , :

, 62000 :

:
. , : , , . , , , , , , . , , - .
, , - , - : , , , , , — . , , , , , , , — . ?
, . :
, , ( ). : , . , , .
. , .
. , , . , — .

— :

11- : , ; :

12- : , , :

50- : , 12-

1766: . J(w)=0.3456480221 — , , ( J(w)=0.3456478372 : 6- , , )

1767: J(w)=0.34564503 — , ( 6- , ). w0=−1.184831 , w1=0.258455 ( w0 2- : w0=−1.27 , w1=0.26 )

62000: J(w)=0.3445945 — , ( 2- ). :

:
. , , , , .
- η=0.001 , 10-12- ( )
- , , , (1767)
- — 60
- —
— ( , 1767): w0=−1.184831 , w1=0.258455 .
.
t(1)=(t(1)1)=(1.4) ( , t(i) — ). , .. , , ˆy=−1 , .. .
SUM=w0+w1∗t(1)1=−1.18+0.26∗1.4=−0.816
Φ(SUM)=SUM=−0.816
Φ(SUM)=−0.816<0⟹ˆy=−1
, .
: t(2)=(t(2)1)=(7)
Φ(SUM)=SUM=−1.18+0.26∗7=0.64⩾0⟹ˆy=1
, .. . .
, ( «» ) 12 . , !
(m=2)
, , , . . , , .
— ( ). 2- .
plt.scatter(X1[y == -1], X2[y == -1], s=400, c='red', marker='*', label=u': -1') plt.scatter(X1[y == 1], X2[y == 1], s=200, c='blue', marker='s', label=u': 1')

, .
, — , , 1- , 3-:

:

:

— :

() (-). :

, , , , , ( , ). , . , , m=2, (m+1)=3: , — , , — , ( ).
() , .., , 3 + — 4 . , 2- 3- - 3-, , - 4- 3-, .
2- . , , 1- 2-.
( ):
:
3- ( 3- ), , , , .
— , , :


:

:

3- - :

4- :

60- — , :

70- , , :

200- — :

400- — :

:

, , .
Código
matplotlib ( mpl_toolkits.mplot3d.axis3d) ( , , 3). Mayavi .
import numpy from mayavi import mlab
, Mayavi , . , , , .
Mayavi, Matplotlib/axes3d, 3- OpenGL. , ( ) , Qt. mayavi . pip PyQt5 python-qt (, - , 'qt'). , , , , , :
env QT_API=pyqt python3 gradient-2d.py
—
def sse_(X1, X2, y, w0, w1, w2): return ((w0+w1*X1+w2*X2 - y)**2).sum()
12 :

70 :

, , : 6-12- , 70- — 70- , 30-, 40- 200-, , , , .
Conclusão
ADALINE (adaptive linear neuron — ) — . scikit-learn ADALINE ( - , ) , , - « 80-» (ADALINE 60-), .
«Python » ( scikit-learn) , - .
ADALINE .
-, — , : , , , .
-, () , , , ( , , ) — , scikit-learn.
PS , ADALINE . , , , , ADALINE - , . , ADALINE . , - .