Boa tarde Como você sabe, as estradas na Rússia estão longe de ser as melhores e, portanto, ainda é relevante o desenvolvimento e a programação de blocos de suspensão ativos para carros que se adaptam ao tipo de superfície da estrada, escolhendo um modo de operação ou algoritmo.
Vou dar uma série de diagramas elétricos e recomendações.
Primeiro você precisa decidir sobre o tipo de microprocessador - um microcontrolador. Aconselho que você escolha um microcontrolador STM rápido e moderno de 32 bits ou similar - a melhor opção da Infineon.

Um dos fatores mais importantes e a chave para a confiabilidade do circuito é o design correto da fonte de energia e do chicote. Aconselho que você use reguladores LDO multicanal no projeto de microprocessador com um SPI de barramento serial para controlar os modos de energia, desligamento de emergência e monitoramento (energia boa).

Em seguida, prosseguimos para o desenvolvimento da "unidade de energia". Projetamos um esquema de controle para elementos elásticos - amortecedores:
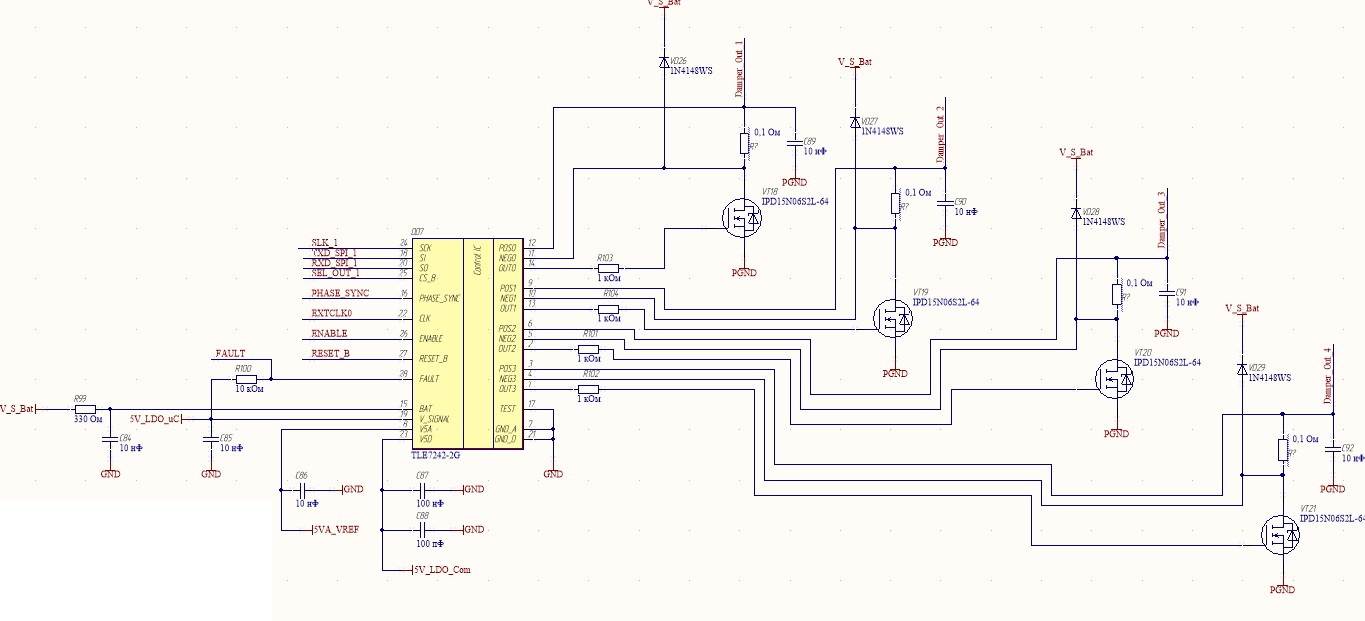
É melhor escolher chips especializados certificados para a indústria automotiva, por exemplo, o TLE7242 Infineon. Ele contém os circuitos de controle MOSFET para sobrecarregar os circuitos de saída da fonte de drenagem.
Para válvulas de controle da bomba de ar, as chaves inteligentes devem ser usadas com proteção integrada contra aumento de temperatura, curto-circuito da carga e sobretensão:
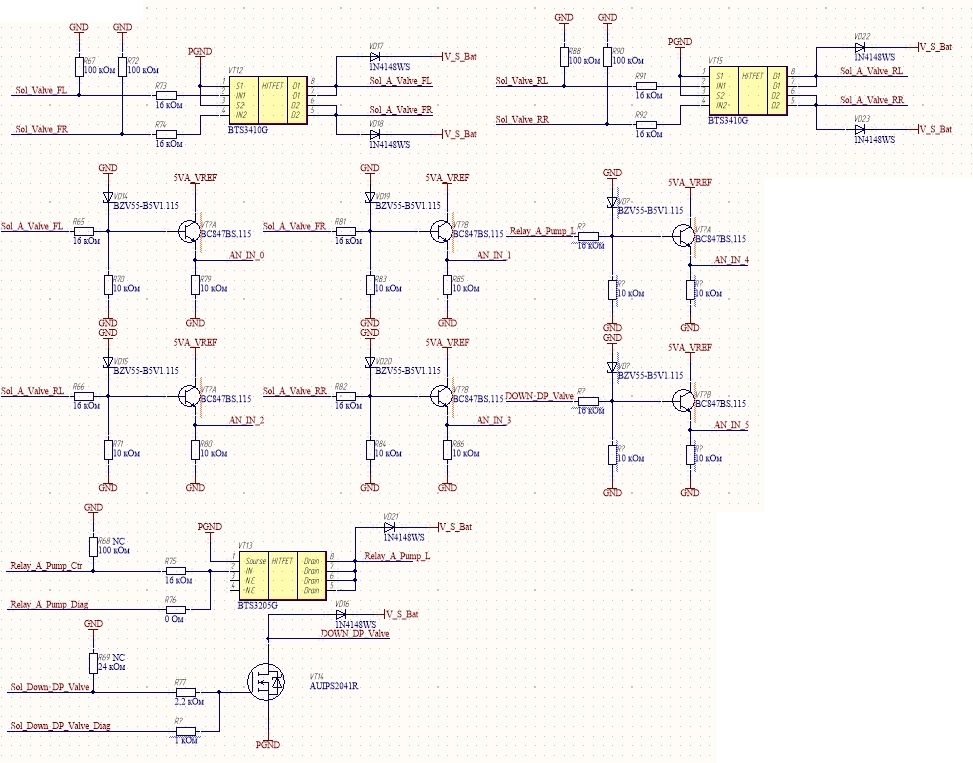
e válvulas da bomba de ar Air_Valve_Pump:

Depois de projetar a "unidade de energia", prosseguimos com o desenvolvimento de circuitos elétricos para conectar sensores de aceleração. Escolhemos o protocolo para transmissão de dados seriais via interface I2C devido à simplicidade comparativa da programação, uma linha de dois fios e uma baixa frequência de transmissão de informações. Certifique-se de proteger contra a tensão de entrada da rede + 12V e a inversão de polaridade, puxando-a para os circuitos de energia do diodo + 5V, + 12V e TVS. Usei multiplexadores da Analog Devices para comutação sequencial de canais:

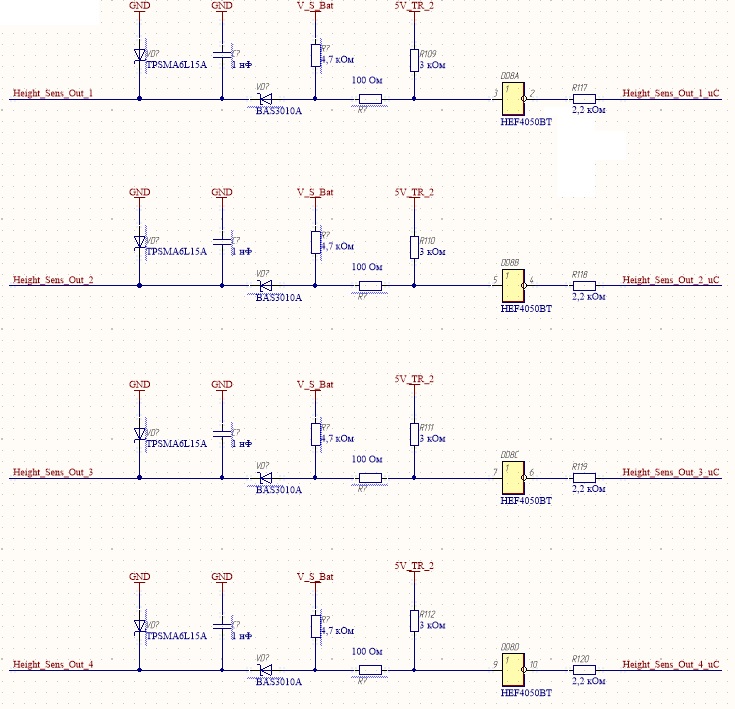
O diagrama de conexão dos sensores de altura é bastante simples, o microcontrolador lê informações sobre os pinos de E / S na borda ascendente:
Para configurar e calibrar a unidade, são utilizados dois transceptores CAN independentes, fabricados em chips TLE6250 com proteção ESD integrada. Para proteger a linha de transmissão diferencial, eu instalei adicionalmente supressores PESD2CAN.
Algumas palavras sobre programação de blocos. O código fonte é escrito em C para comunicação entre nós em um nível baixo e protocolos de comunicação: SPI, I2C, CAN. Para controlar o bloco a partir do nível superior, as principais variáveis são traduzidas pelo programa MatLab & Simulink por meio do compilador C e pelas funções internas do pacote matemático.