Minha história é imersão no estudo da robótica e na criação de um robô usando uma impressora 3D. Erros que encontrei e o que gostaria de receber como resultado
Antecedentes
Cerca de 10 anos atrás, nos primeiros cursos da universidade, aprendendo sobre a existência do Arduino e aprendendo a encomendar mercadorias da China, encomendei um kit inicial Arduino Mega e comecei, como todo mundo, a piscar um LED. Fiquei muito satisfeito com o fato de não apenas poder programar e obter algumas soluções na tela do computador, mas também criar alguns dispositivos para facilitar a vida. Comecei a pensar em IOT antes de aprender sobre esse conceito e, de tempos em tempos, pensava em implementar coisas úteis. O primeiro projeto no Arduino, que considerei concluído por mim mesmo, foi um controlador para um terrário com uma aranha. Tela, vários botões para controle, sensor de temperatura e umidade DHT11, automação da luz de fundo, aquecimento com cabo de incubadora e tudo. Eu já tinha experiência em trabalhar com pascal na escola, gostava de programar, mas não queria conectar a vida diretamente, era chato para mim e obviamente fui estudar na especialidade de engenharia, ou melhor, Tecnologias de Design da Informação no NTU "KhPI" .
Eles prometeram uma direção super avançada, tecnologias avançadas, informaram o quanto esses especialistas estavam em demanda e atraíram com imagens brilhantes de cálculos na Ansys, Solidworks e outros sistemas de software. De fato, agora, seis anos após a formatura, posso dizer que não me arrependo nem um pouco de ter escolhido essa direção para mim. Muitas coisas, é claro, não eram as descritas na admissão, mas no terceiro ano eu esperei pelos itens de que gostei. Fiquei interessado em estudar sistemas CAD, em um dos Olympiads recebi um certificado CSWA da Solidworks, sem esforço e sem me preparar para isso. Porém, após a graduação, recebi uma oferta sem experiência e conhecimento especial em programação para a posição de desenvolvedor .NET para projetos relacionados à integração de plugins no Solidworks. Depois, 6 anos de trabalho com o .NET em várias empresas com direções diferentes, uma tentativa de trabalhar remotamente com criptomoedas etc. mas tudo isso não me trouxe prazer. De tempos em tempos, eu percebia que gosto do processo de automação dos processos cotidianos, mas não conseguia pensar em nada para fazer isso, não apenas para jogar, mas para algo real e útil. Os anos se passaram, a universidade continuou por vários anos, não havia tempo livre, mas, de alguma forma, na véspera do reparo, decidi que essa chance era aplicar meu conhecimento e tentar fazer algo realmente útil, e comecei a desenvolver uma casa inteligente. Ele atualizou um pouco de conhecimento sobre a situação atual dos microcontroladores no mundo, aprendeu sobre a existência de um ESP8266 com Wifi a bordo, uma vez uma startup ucraniana Blynk, que permite obter aplicativos condicionalmente gratuitos para controlar um dispositivo a partir de um telefone, sem experiência e conhecimento sobre o desenvolvimento de software para telefones. Alguns meses depois, recebi um protótipo montado em uma tábua de pão, mas funcionou de maneira estável. Pela primeira vez, para testes, deixei-o na forma de módulos parafusados nas caixas de distribuição. Gostaria de escrever que, após os testes em condições reais, espalhei o quadro e montei tudo bem, mas não, pelo terceiro ano tudo está funcionando de maneira estável, por isso não estou tentando refazer nada. Pelo que me foi útil nisso, tive a oportunidade de economizar a eletricidade automaticamente, incluindo os principais consumidores, como caldeira, lava-louças e lavadoras a uma taxa noturna. Monitorando a temperatura em cada quarto e, consequentemente, controlando o aquecimento em cada quarto. Lá, ele também implementou um controlador para aquecimento de piso e iluminação pública. Há 3 anos, toda essa solução me custou cerca de US $ 50, considerando que custa apenas um controlador normal para um piso quente. Três anos de operação de todo esse sistema me deram confiança de que os microcontroladores podem realmente ser usados para desenvolvimento e que podem funcionar de maneira estável.
As primeiras tentativas de construir um robô
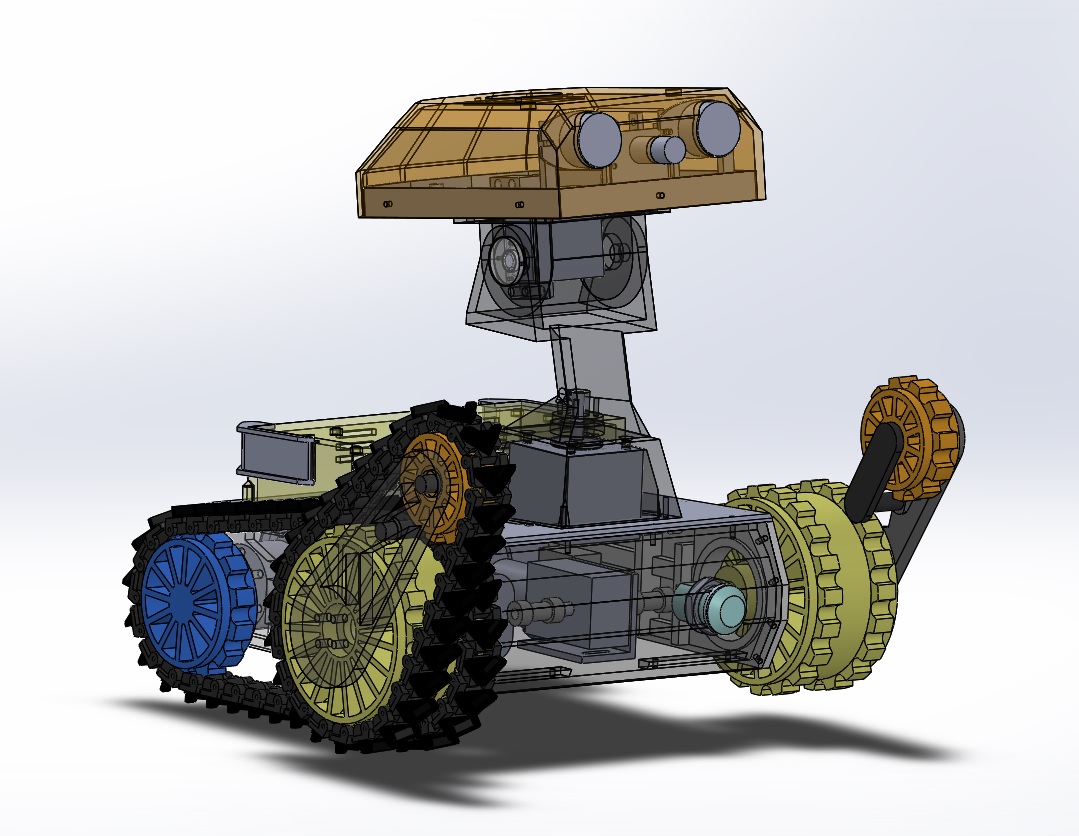
Alguns anos atrás, eu ainda decidi e aloquei um orçamento para um hobby comprando uma impressora 3D. O clone de compensado da Ultimaker imediatamente começou a ser finalizado à mão, as portas e a caixa de acrílico foram finalizadas para a impressão de ABS, e comecei a entender que com a impressora já era possível desenvolver algo mais sério, móvel e interessante para mim. Lembrando-me das transmissões infantis na televisão com as batalhas de robôs, decidi, por que não fazer algo interessante. Eu fui ao festival de robótica, me empolguei com essa idéia ainda mais. Comecei a assistir projetos robóticos no thingiverse e percebi que tudo estava errado, os projetos de outras pessoas eram na maioria chatos e comuns, a falta de código fonte e ainda o “YAGENZHENER”. Eu queria algo com mecânica incomum, e não apenas uma distância entre eixos. Eu queria implementar um mecânico semelhante a um robô ao carregar o Solidworks.
 O mesmo robô que se tornou um dos inspiradores
O mesmo robô que se tornou um dos inspiradoresEu olhei para projetos semelhantes, entendi o princípio do trabalho e lembrei-me da idéia de fazer algo semelhante. O primeiro grande erro foi a decisão de que tudo é simples: vou modelar, imprimir e verificar gradualmente o design final, sem ter um entendimento completo do que e como ele será organizado, como será gerenciado e quais módulos serão utilizados. Quão errado eu estava. Inicialmente, entendi que o robô seria "superado", planejei que ele usasse todos os tipos de reconhecimento de objetos usando o OpenCV, algum tipo de navegação, estacionamento automático para carregamento, você não administrará um ESP ali. Inicialmente, surgiu a idéia de usar o ESP32 para trabalhar com mecânica e o RaspberryPi3 para trabalhar com lógica, câmera, som etc. Uma das condições necessárias para mim era a recarga automática, então tive que descobrir como vender energia. Como não tinha muita experiência com engenharia eletrônica / elétrica, tentei inicialmente usar uma aparência do Powerbank com a capacidade de trabalhar no modo UPS. Trabalhe com a bateria (no meu caso, 8 elementos do 18650) quando não houver energia externa e recarregando os mesmos elementos e trabalhando na rede elétrica quando o robô estacionar para carregar. Em geral, houve muitas tentativas de juntar tudo e fazê-lo funcionar, mas percebi que precisava aprender o material ou procurar ajuda. Devido às constantes mudanças de todos os módulos e placas, tudo não se encaixa mais no corpo do robô e, em algum momento, percebi que era hora de refazer tudo.
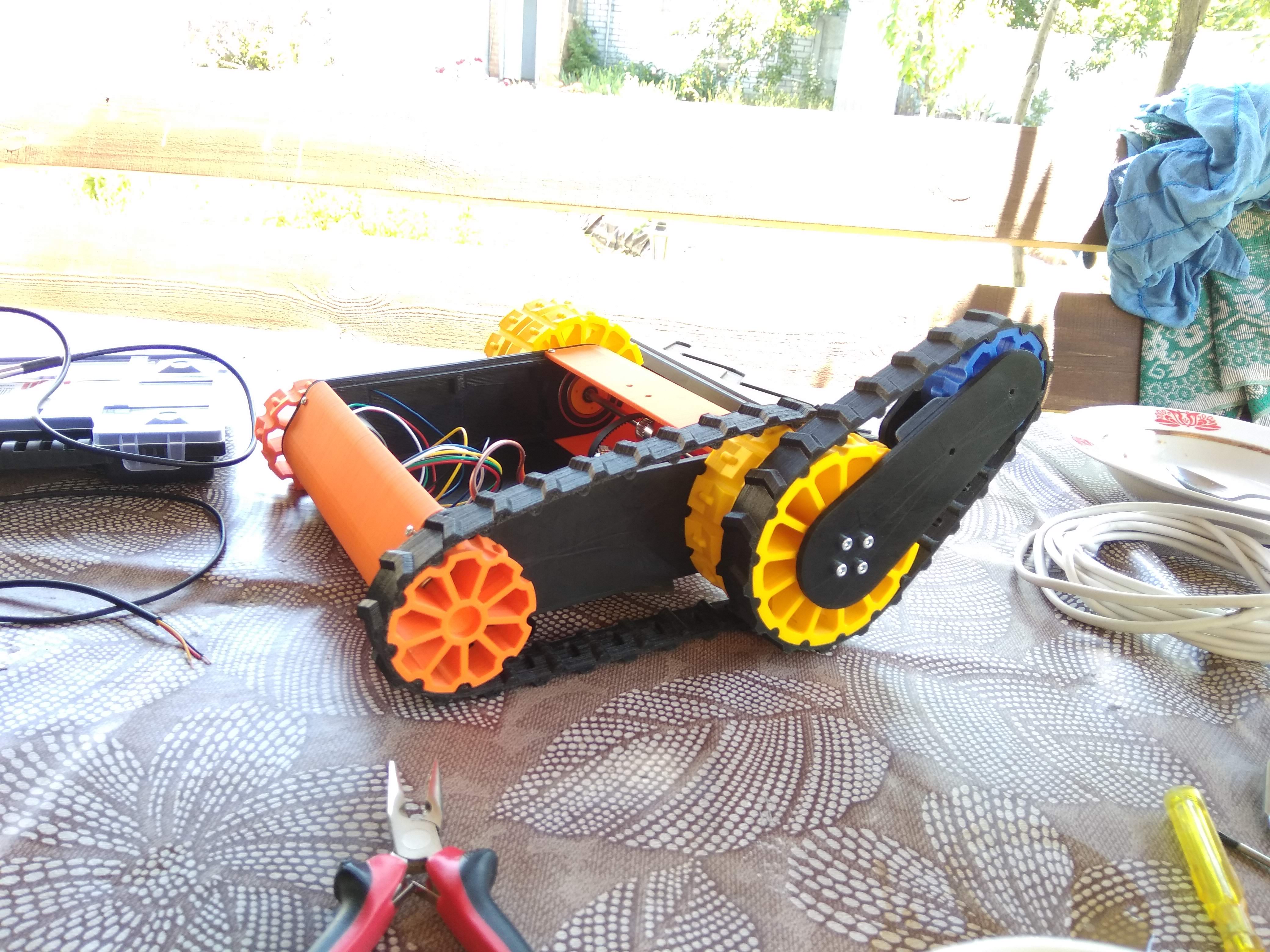 A primeira versão do desenho com esteiras impressas com um cinto e um servo para virar a frente das esteiras
A primeira versão do desenho com esteiras impressas com um cinto e um servo para virar a frente das esteirasPrimeiro trabalho sobre bugs
Depois de participar de um webinar sobre robótica, conheci uma pessoa que desenvolve placas de circuito e decidi por mim mesmo que é mais fácil esboçar algumas especificações técnicas e obter algum tipo de solução de uma pessoa que conhece o design da placa e o desenvolvimento de dispositivos. Ao mesmo tempo, comecei a trabalhar em um novo prédio sobre como olhar para os meus batentes da porta da última vez. E aqui, mais uma vez, passo no mesmo rake até o fim, sem entender como serão todos os componentes eletrônicos, quais dimensões terão e como colocarei tudo. Discutimos que essa seria uma solução modular, eu tinha algumas placas, por exemplo, drivers de motor, baterias e comecei a simular novamente o projeto, mas já desenhando completamente cada placa com orifícios de montagem, tomadas de arame, radiadores etc. para não se deparar com o problema da falta de espaço novamente. Na verdade, eu estava limitado pelo tamanho da área de impressão a 200 * 200 * 200mm, e tentei fazer esta versão do estojo em uma peça, que levou cerca de 400 g de plástico e vários dias para imprimir.
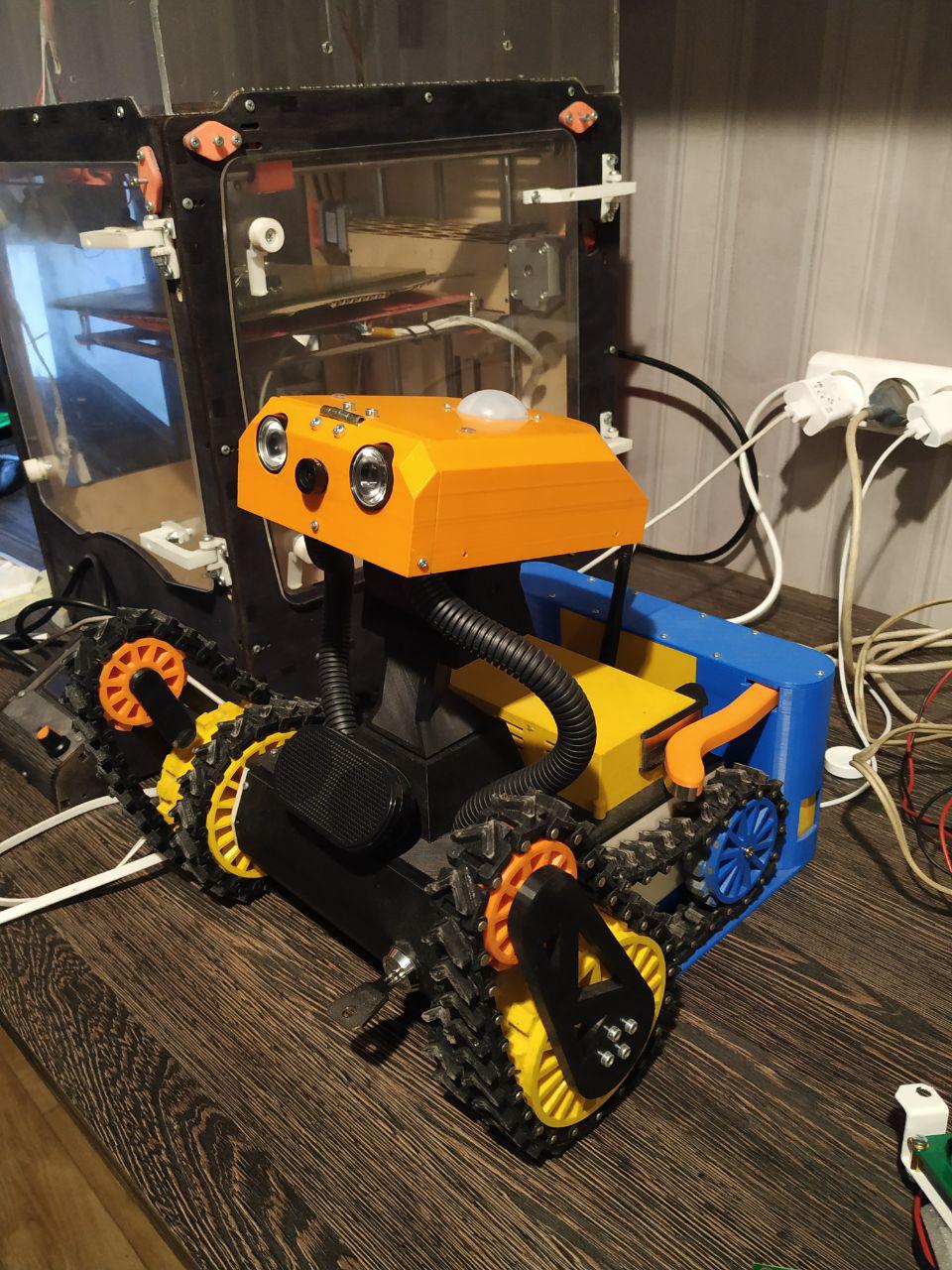
Depois de várias tentativas com rachaduras aparecendo no segundo dia, destacando-se da mesa, percebi que o prédio pré-fabricado não é uma má idéia. O processo de refazer algumas peças levaria muito menos tempo e o problema com a impressora seria muito menor. Tendo recebido um conjunto de placas com todos os meus desejos ao longo do tempo, aprendi a trabalhar com registros de turnos, multiplexadores e pelo menos de alguma maneira comecei a entender os circuitos e dispositivos que eram incompreensíveis para mim. Naquela época, eu tinha refeito completamente a mecânica. Ele mudou o princípio de rotação das patas dianteiras de um servo para um motor de engrenagem e deixou a ideia de imprimir correias para lagartas a partir de um elastano parecido com borracha e as converteu em faixas plásticas pré-fabricadas comuns montadas em pregos e coladas nelas com faixas de elastano. Inicialmente, um sistema de ventilação foi pensado, que retirava o ar por trás do robô, através do sistema de ventilação que passava por todas as placas, tubos nos quais os fios eram enfiados na “cabeça” e soprando ar quente. E esse sistema de ventilação até funcionou em algum momento, mas tudo foi reconstruído novamente, então era mais fácil para mim imprimir a capa com várias ranhuras e ventilação passiva.
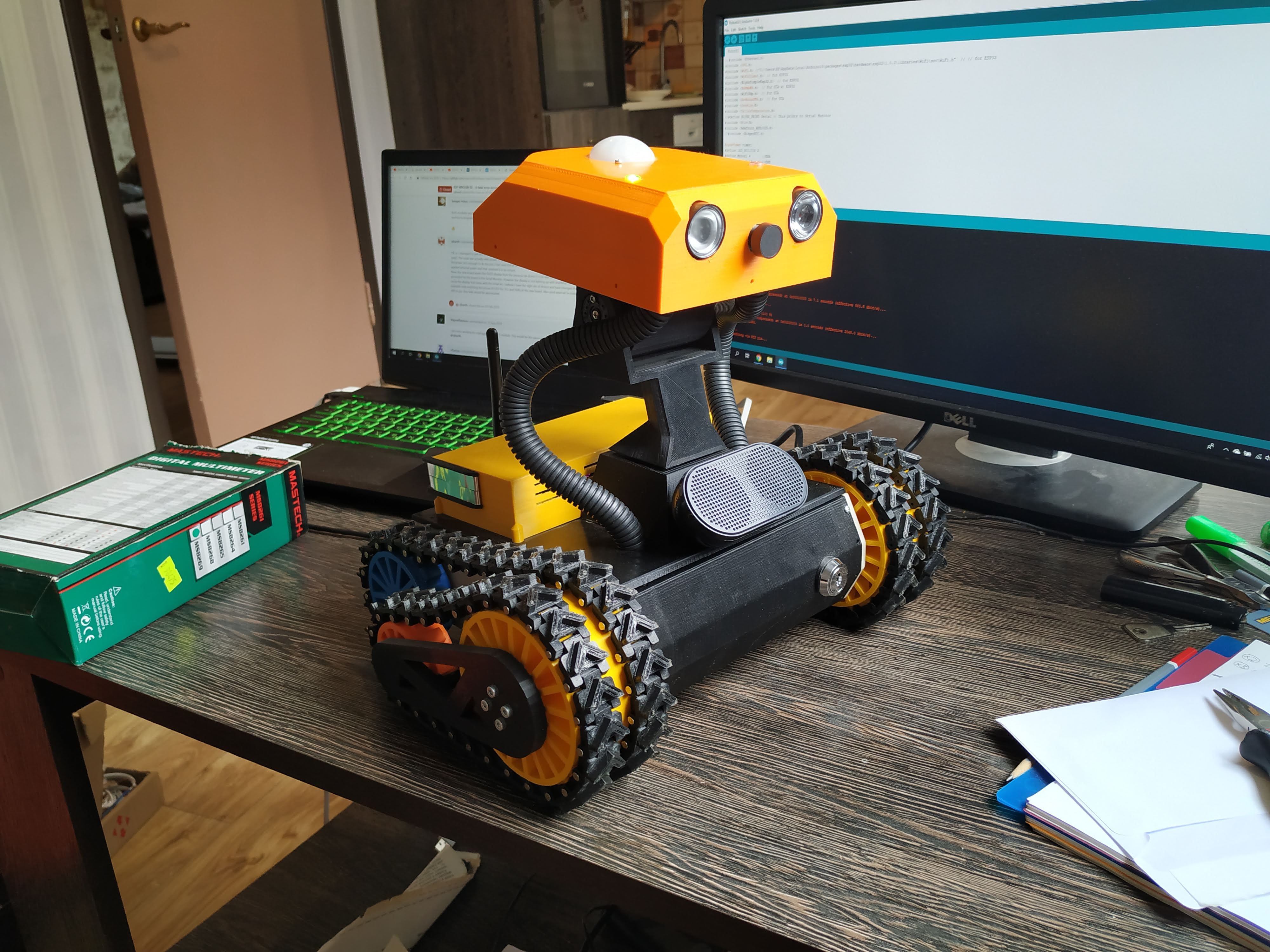
O que está no momento
No fim de semana em Dnepr, foi realizado o festival técnico Interpipe TechFest, no qual decidi mostrar às pessoas o que tenho agora, ouvir as opiniões dos outros e conversar com odnodumtsami. Lá, ouvi novamente que seria possível escrever em algum lugar, por exemplo, em Habré e obter feedback das pessoas.
De fato, para mim, é uma plataforma na qual aprenderei a trabalhar com o ROS, tentarei navegar no espaço, reconstruir punições, tentar trabalhar com uma lidar de estado sólido, que estou esperando no kickstarter, quero estragar algo como uma câmera estéreo realsense. Entendo que o cérebro da framboesa provavelmente não será suficiente para mim e, com o tempo, mudarei para algo mais poderoso.
Agora, esse robô pode ser usado como um "vigia doméstico". Embora o gerenciamento seja organizado por meio do mesmo aplicativo Blynk. É equipado com um sensor de movimento de cúpula, uma câmera com a capacidade de ligar / desligar o filtro IR, iluminação IR. Depois de ativar o modo de proteção do telefone, recebo uma notificação no telefone. Posso ativar o RaspberryPi 3, iniciar o streaming, streaming + gravação de vídeo, tirar fotos que são enviadas para o meu e-mail. Posso ver o que acontece lá em casa e retornar à estação de carregamento.
A bateria 4s2p auto-montada dos módulos 18650 a 3200mAh me dá cerca de 8 horas de condução sem recarregar com todo o equipamento ligado e transmissão de vídeo e sem qualquer otimização da economia de energia. Até agora, as mãos não chegaram a isso. Usando o Google TextToSpeach, escrevendo no terminal deste aplicativo, o robô lê o texto. E isso é de qualquer lugar do mundo onde eu tenho uma conexão com a Internet.
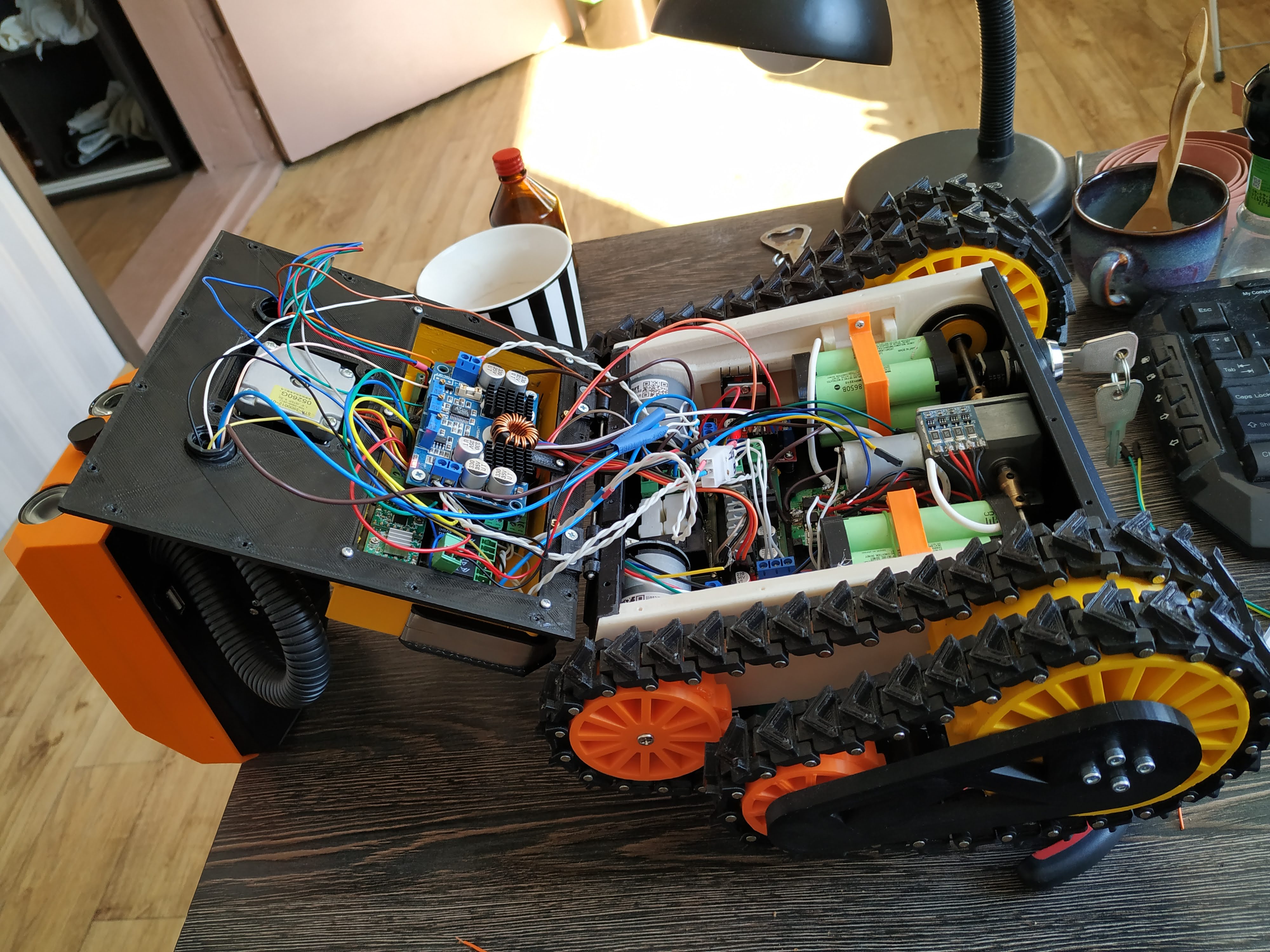 Um pouco de lata dentro
Um pouco de lata dentro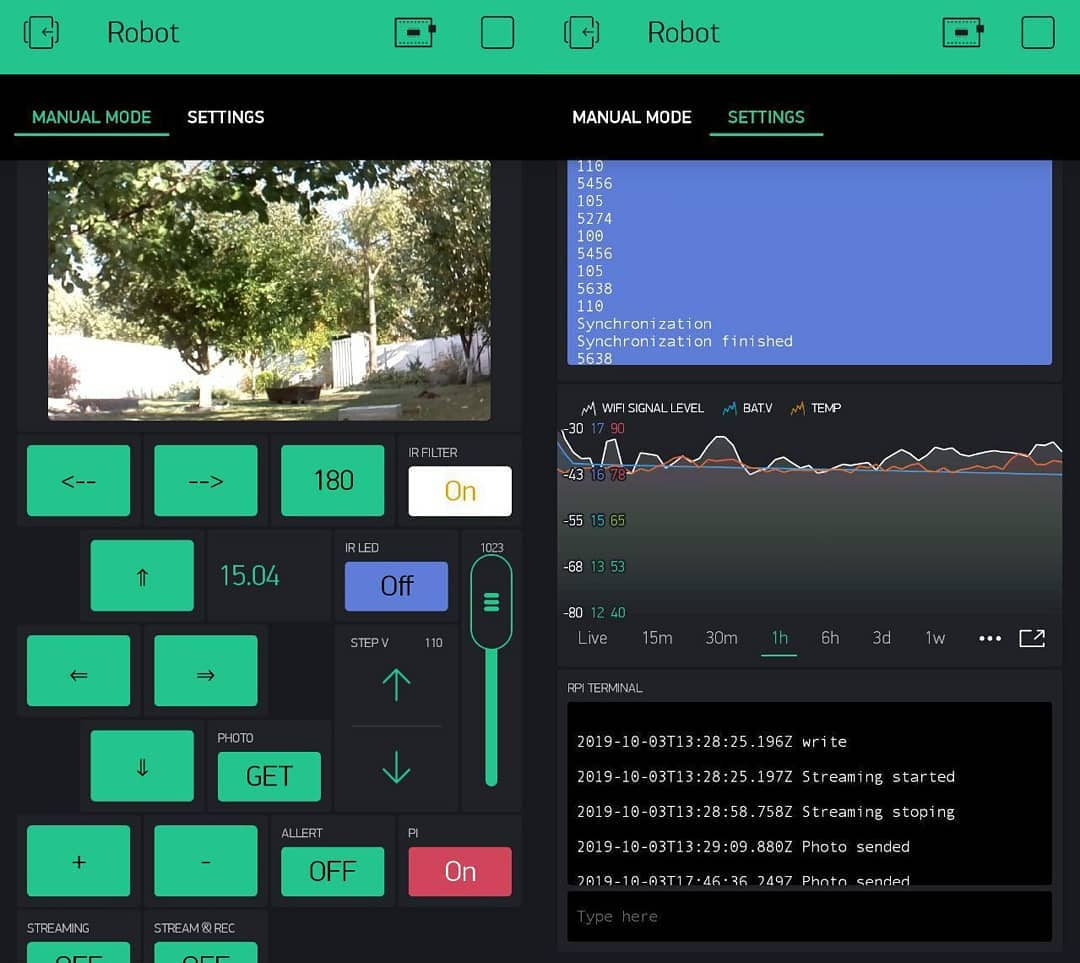 É assim que a interface do usuário controla o telefone
É assim que a interface do usuário controla o telefoneO que vem a seguir e por que estou escrevendo tudo isso
Em geral, o objetivo de visitar a exposição era encontrar novos conhecimentos com odnodumtsami, prontos para começar a fazer algo relacionado à robótica. Estou cansado de trabalhar como programador, escrevendo aplicativos de desktop, isso não é tão legal quanto parecia uma vez e acho que essa direção está gradualmente se curvando. Em vez de me reaprender para o desenvolvimento da WEB, decidi mudar radicalmente de direção e conectar minha vida à robótica e IOT, das quais realmente gosto. Por mim, decidi que, enquanto trabalhava no trabalho não relacionado a essa área, não tinha tempo suficiente. Tenho que escolher entre o que preciso e o que gosto e quero, economizei algum dinheiro, saí do trabalho e comecei a estudar tudo isso.
Tenho várias idéias sobre o tema da robótica, as principais relacionadas à agricultura, baseadas em visão computacional, mapas de profundidade, reconhecimento de objetos etc. Entendo que há muito trabalho e agora comecei a lidar com o ROS. Tenho conhecimento em engenharia, a capacidade de trabalhar com sistemas CAD / CAE e, em princípio, pode realmente fazer tudo sozinho, mas entender quanto trabalho precisa ser feito em mecânica, desenvolvimento, erros de cálculo e aprender totalmente como trabalhar com ROS, mapas de profundidade, sensores, orientação espacial e trazer tudo à mente será muito difícil. Portanto, estou procurando várias pessoas. que estão prontos para se dedicar seriamente ao trabalho nessa startup e se tornar um dos co-fundadores. Obviamente, não posso prometer que tudo será legal e, em meio ano, nossa startup nos trará muito dinheiro, mas até que esse nicho esteja cheio, você pode tentar implementar algo no nível do primeiro protótipo e acessar aceleradores, plataformas de crowdfunding e de alguma forma, se anunciar.
Também estou pronto para considerar propostas nessa direção. Estou pronto para trabalhar com alguém na startup de alguém, ou não necessariamente uma startup, mas simplesmente no desenvolvimento de alguma empresa, mas em uma direção interessante para mim.
Por isso, gostaria de ouvir comentários sobre esse assunto. Talvez, afinal, isso interesse alguém. Eu mesmo moro na cidade de Dnepr, na Ucrânia. Assim, seria mais correto trabalhar em um projeto em relativa proximidade, embora em centenas de quilômetros, em vez de milhares, todas as opções estejam sendo consideradas.
Se houver alguma dúvida sobre o dispositivo do meu robô, estou pronto para responder e discutir. Também na página do facebook existem vários vídeos do robô e seus obstáculos superados
Se alguma coisa você sempre pode me encontrar aqui no
facebook ou me escreva em marchenko.andrii@gmail.com