 Em um artigo anterior,
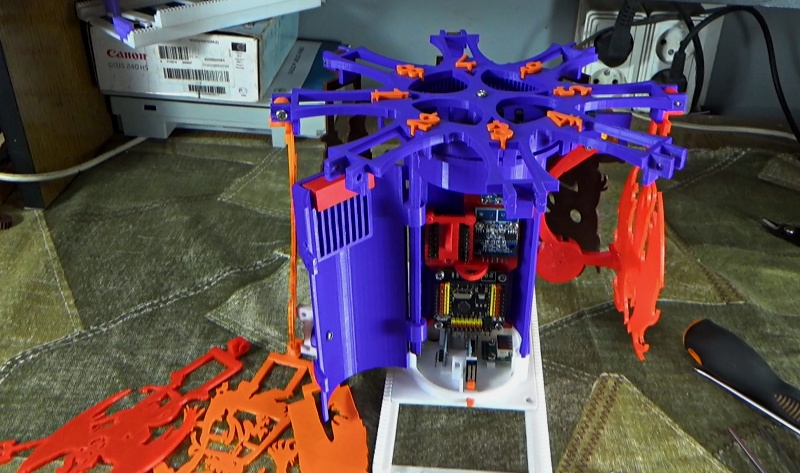
Em um artigo anterior, falei sobre meu novo desenvolvimento - o brinquedo robótico de carrossel demoníaco. Refinei substancialmente esse modelo e, embora o dispositivo ainda esteja inoperante (ainda preciso escrever um programa), ainda tenho algo a lhe mostrar e dizer. O design do alvo mudou seriamente, e o princípio do campo de tiro permaneceu o mesmo.
Todas as partes do campo de tiro foram impressas em uma impressora 3D, por quase 50 horas, a uma velocidade de 50 e uma camada de 0,1 mm. A impressão poderia ser mais rápida, mas a qualidade do dispositivo seria prejudicada.
Na nova versão do brinquedo, gastei cerca de 350 gramas de filamento. Mas, é claro, foi preciso muito mais para desenvolver um modelo de filamento, levando em consideração todas as tentativas e erros.
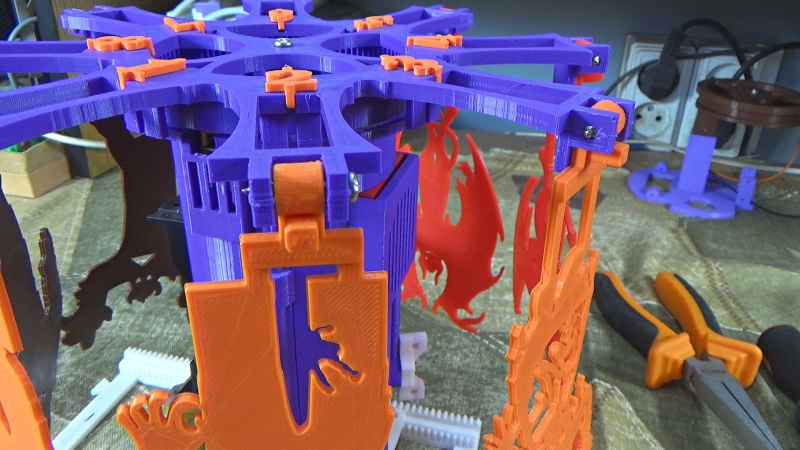
A nova versão do detentor do alvo agora parece mais elegante; além disso, foi necessário menos filamento do que a versão anterior deste dispositivo. Também graças a isso, pude reduzir o número de parafusos de dois para um para anexar cada um dos oito alvos.

Para um posicionamento preciso do alvo, é implementada uma engrenagem cilíndrica com engate interno. Assim, evitei as desvantagens da primeira opção, onde o suporte do alvo foi montado diretamente no eixo do motor.

Dois acopladores ópticos colocam o alvo na posição correta sob o dispositivo de elevação. O uso de acopladores ópticos é uma opção barata, por isso não usei um sensor de posição magnético neste modelo, que custa cerca de sete dólares. Também fiz uma versão de teste, com um sensor de posição magnético, mas verificou-se que isso apenas aumenta o custo da estrutura e não faz nenhuma melhoria significativa na operação do dispositivo.
Para que os optoacopladores operem nos lugares certos, existem dois setores na parte de trás do titular da meta. Um setor, com uma posição, permite determinar a posição inicial do destino. No segundo setor, existem oito posições que determinam se há um alvo sob o dispositivo de elevação.
O mecanismo do dispositivo de elevação com a localização do sensor de choque permaneceu quase o mesmo, aqui o design não sofreu alterações especiais.

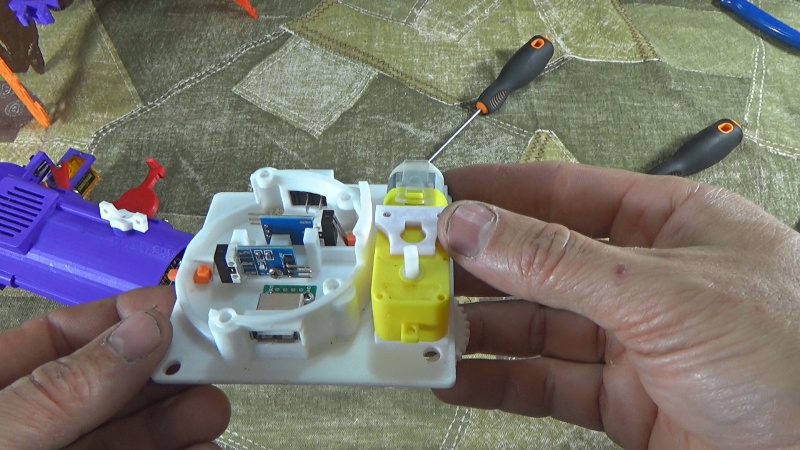
Como não há corpo no banco de potência, a placa do banco de potência está localizada no final do suporte cilíndrico, que atua como o suporte de toda a estrutura de destino. A desvantagem do design é que você precisa dessoldar o conector USB e o comutador que estão na placa do banco, caso contrário, o banco não entrará em seu lugar.


Não restringi o acesso à bateria de lítio e a cobri com o estojo, embora isso possa ser melhorado ainda mais: existem furos quadrados especiais no estojo para isso. Os parafusos são parafusados através desses orifícios para prender o banco de potência ao alojamento. Essas aberturas podem ser um elemento de fixação para o invólucro que oculta a bateria de lítio.
Existem mais dois orifícios no gabinete. Um deles permite conectar o carregamento USB a um banco de energia e o segundo serve para monitorar visualmente o status dos LEDs.
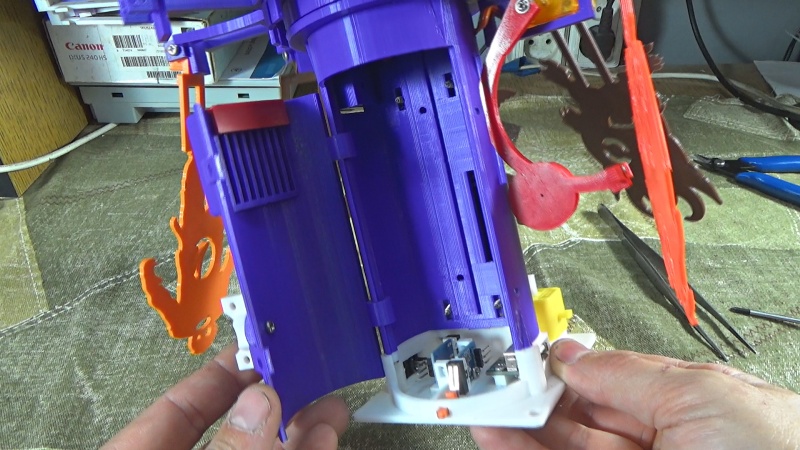
O suporte cilíndrico é oco, para que todos os componentes eletrônicos usados possam ser colocados dentro dele. Uma porta especial é fornecida para acesso.
As placas dos módulos utilizados, incluindo o microcontrolador, são presas ao painel usando os parafusos curtos M3. Naturalmente, o painel falso é feito de plástico e também é preso ao corpo com dois parafusos.
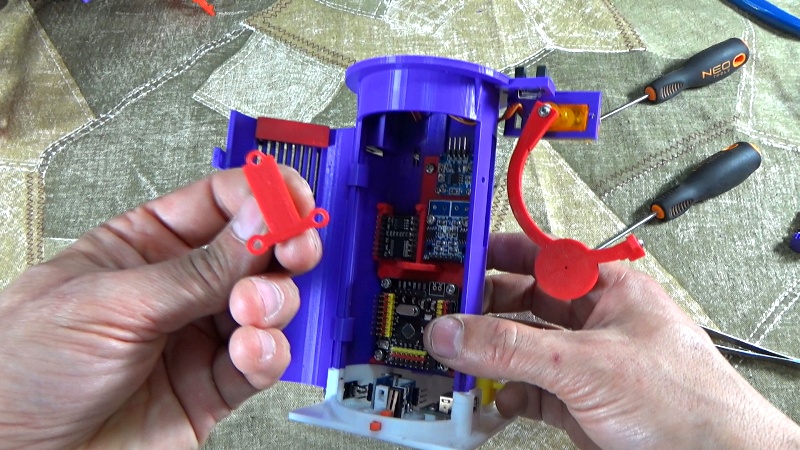
Uma exceção foi o módulo de som, que não foi projetado para montagem com parafusos. Portanto, o módulo de som é fixado em um nicho especial. A propósito, um alto-falante é necessário para seu uso e se encaixa perfeitamente no design da porta.

Eu melhorei e a plataforma móvel. Os interruptores de limite para restringir o movimento de alvos nos trilhos agora estão ocultos dentro do alojamento. A transferência para as chaves fim de curso localizadas nos trilhos ocorre por meio de empurradores. Esses empurradores são duas tiras de plástico localizadas nos nichos ocos da caixa do local.
O design dos empurradores projetou uma ênfase especial, que não permite que os empurradores caiam de seus nichos.
No futuro, pretendo combinar outros dispositivos que ainda não foram desenvolvidos por meio de um conector USB. Até começar a especificar que tipo de dispositivos serão esses, só posso dizer que esses serão projetos muito interessantes.