
Em agosto de 1913, Peter Nesterov realizou uma das manobras mais emocionantes, perigosas e complexas da aviação - o laço morto. Naquela época, especialmente considerando a tecnologia então, e agora é uma verdadeira acrobacia. Muitos profissionais e amadores modernos do campo da aviação dariam tudo para conversar com Nesterov. Infelizmente, isso não é possível, mas outros ases de acrobacias geralmente moram conosco e muitas vezes nos incomodam. Como regra, nós não os notamos ou dirigimos pelo apartamento com chinelos ou jornais, porque para nós são pragas, portadores de qualquer infecção e apenas panfletos irritantes. Mas para os cientistas, essas criaturas são os guardiões dos segredos do voo e do pouso. Hoje, encontraremos um estudo incrível da capacidade das moscas comuns de pousar de cabeça para baixo em qualquer superfície. Que mecanismo de aterrissagem as moscas usam, em quais processos elas consistem e qual a dificuldade de implementá-las artificialmente em robótica? Aprendemos sobre isso no relatório do grupo de pesquisa. Vamos lá
Base de estudo
Obviamente, você não pode dar todos os louros da superioridade ao voar para as moscas, pois muitos outros insetos também têm suas habilidades únicas no campo de vôo e pouso. No entanto, as moscas, por assim dizer, acumularam em si mesmas o número máximo de habilidades diretamente relacionadas à sua anatomia.
 Aparência de uma mosca da espécie Calliphora vomitoria.
Aparência de uma mosca da espécie Calliphora vomitoria.Neste estudo, o principal papel foi desempenhado pelas moscas da espécie
Calliphora vomitoria (mosca azul). Esta espécie pode ser encontrada em quase qualquer canto do planeta: da América do Sul ao leste da Ásia. As dimensões dessas moscas são bastante impressionantes, com 10 a 14 mm de comprimento, aproximadamente duas vezes maior que a das moscas
domésticas comuns (
Musca domestica ). Externamente, o
Calliphora vomitoria pode ser distinguido de seus parentes pelo abdômen azul, graças ao qual também é chamado de "
mosca da garrafa azul", sugerindo uma semelhança com a cor do vidro azul da garrafa.
Além das diferenças externas das moscas domésticas, a
Calliphora vomitoria também possui moscas comportamentais. As moscas azuis preferem voar em um pequeno enxame em vez de isoladamente, o que lhes permite encontrar rapidamente comida (geralmente é o néctar das flores com cheiro forte). Quando um indivíduo do enxame encontra comida, ele segrega um feromônio especial, sinalizando a descoberta para todos os outros.
As pessoas costumam usar larvas de moscas azuis como isca durante a pesca, mas para insetos essa não é a aplicação mais única e, na verdade, não é a mais digna. Não apenas os pescadores encontram graça nas moscas azuis, mas também na perícia. As moscas, como sabemos, não são sensíveis, porque os cadáveres de animais e pessoas não as assustam, mas as atraem. Para especialistas forenses, esse é um critério adicional para estimar a hora da morte, uma vez que as moscas azuis têm uma relação muito clara entre a taxa de crescimento de suas larvas e a temperatura ambiente. Conhecendo a temperatura, é possível determinar a partir das larvas o momento em que os ovos foram postos.
Mas hoje não falaremos sobre forense, mas sobre aviação. Estudo de ajuste invertido, ou seja, A aterrissagem no teto, como os cientistas o chamam, foi realizada anteriormente, mas não com tanto detalhe. No entanto, algumas nuances interessantes foram descobertas. Durante as observações do pouso invertido de moscas domésticas, os cientistas notaram que eles fazem movimentos rotacionais "semicirculares" antes do contato das patas
ipsilaterais * com a superfície.
Ipsilateral * - localizado no mesmo lado (exagerado, o braço esquerdo de uma pessoa é ipsilateral em relação à perna esquerda).
Após esse movimento, ocorreu a oscilação lateral do corpo com a ajuda das pernas, o que levou ao contato das demais pernas com a superfície. Essas e outras manobras antes do pouso real, é claro, são devidas ao sensor, ou seja, sinais visuais, táteis e outros recebidos pela mosca antes do pouso.
Em nosso estudo de hoje, cientistas da Universidade da Pensilvânia realizaram uma série de observações sobre o pouso de moscas azuis em uma superfície invertida em uma câmara de vôo (em um túnel de vento) usando vídeo de alta velocidade (
1A ).
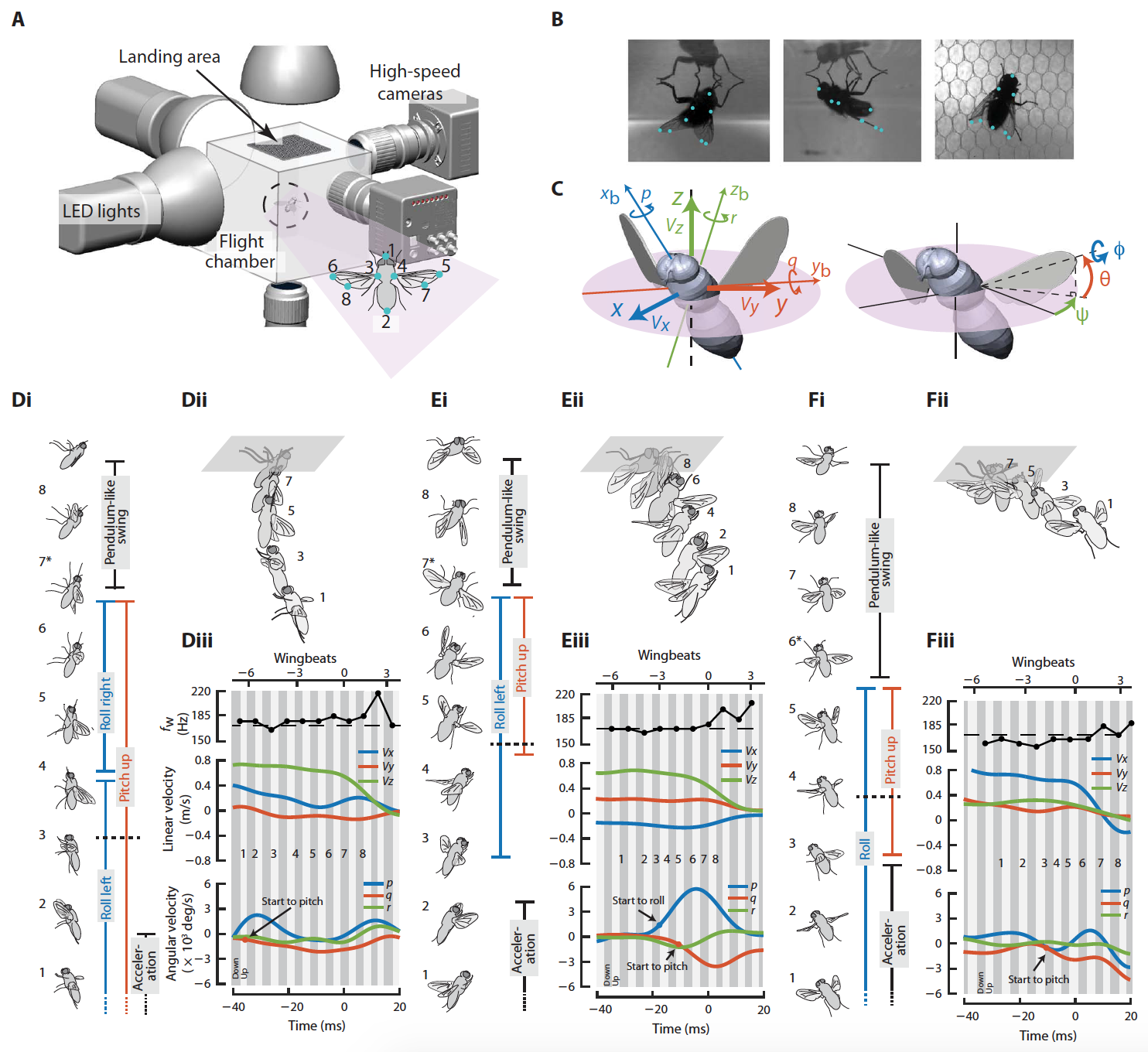 Imagem Nº 1
Imagem Nº 1A cinemática do corpo e das asas das moscas foi obtida através da digitalização de rótulos anatômicos (
1B e
1C ).
Resultados da observação
Antes de tudo, os cientistas decidiram isolar e analisar os aspectos comportamentais de uma aterrissagem bem-sucedida.
Eles observam que as moscas da fruta pousam em superfícies verticais através de desaceleração contínua e ligeira rotação do corpo antes do plantio. Mas as moscas azuis durante a aterrissagem mostraram imediatamente quatro aspectos comportamentais consecutivos: aceleração vertical, manobra rotacional de todo o corpo, extensão das pernas e balanço de todo o corpo com as patas dianteiras fixas de forma estável na superfície. A duração de todo o processo de pouso bem-sucedido foi de aproximadamente 4-8 impactos nas asas, de acordo com 18 observações, enquanto a frequência média de impacto nas asas foi de 172,7 ± 7,7 Hz.
Durante pousos bem-sucedidos, os cientistas também observaram mudanças cinemáticas significativas nos eixos de rotação, nos valores das manobras de rotação e no grau de balanço do corpo devido às patas.
Depois de reunir todas as observações, os cientistas identificaram as principais estratégias durante o pouso, classificadas da seguinte forma: dominante no
arremesso * , dominante no
arremesso * , combinadas e dominantes no balanço lateral / longitudinal.
Inclinação * - o movimento angular do corpo em relação ao eixo transversal horizontal.
Rolar * - a rotação do corpo em torno de seu eixo longitudinal.
Vídeo 1: aterrissando com um tom predominante (corresponde à imagem 1D).Vídeo nº 2: aterrissando com um rolo predominante (corresponde à imagem 1E).As imagens
1D -
1F mostram padrões típicos de comportamento de uma mosca azul durante o pouso. Nos dois primeiros exemplos, as moscas usavam manobras rotacionais rápidas, principalmente em relação ao eixo de afinação (
1D e vídeo nº 1) ou rolo (
1E e vídeo nº 2), que definiam seu corpo antes de pousar em uma orientação quase invertida (barriga para cima).
O alinhamento das patas ocorreu quase imediatamente após o início das manobras rotacionais (linhas pontilhadas pretas horizontais em
1Di e
1Ei ). Depois que as patas tocaram a superfície, a fase de oscilação do corpo começou.
É curioso que a velocidade angular média das manobras de rotação tenha atingido aproximadamente 4000 ° / s, e seu valor máximo possa exceder 6000 ° / s, valor significativamente maior que o das moscas da fruta ou mesmo beija-flores.
Vídeo nº 3: aterrissagem com a vibração longitudinal predominante do corpo (corresponde à imagem 1F).Na terceira versão, as moscas dependiam quase inteiramente do balanço do corpo com as patas (
1F e vídeo nº 3), e a manobra rotacional era insignificante.
Vídeo # 4: aterrissagem com balanço lateral predominante no corpo.Assim, comparada às duas primeiras opções, essa estratégia de pouso provavelmente utilizou mais processos mecânicos e estruturais (por exemplo,
adesão * devido a
pulvilhas * ou
amortecimento * devido à viscoelasticidade das patas), o que facilitou a transferência do momento linear do corpo para o momento rotacional .
Adesão * - adesão de superfícies de diferentes origens (por exemplo, gotas de orvalho na grama).
Pulvilla * - almofadas macias da ponta das pernas, cada uma delas localizada sob sua garra. A principal tarefa das pulvillas é manter o inseto em uma superfície vertical lisa ou inclinada.
Amortecimento * - supressão artificial de vibrações.
O próximo passo no estudo foi estudar as diferenças cinemáticas entre pousos bem-sucedidos e fracassados.
Vídeo nº 5: aterrissagem com mecânica combinada de inclinação.Desembarques mal-sucedidos incluíram aqueles que terminaram em colisão com a superfície (que é para os cientistas os dados para análise, depois para moscas uma concussão, figurativamente falando, é claro).
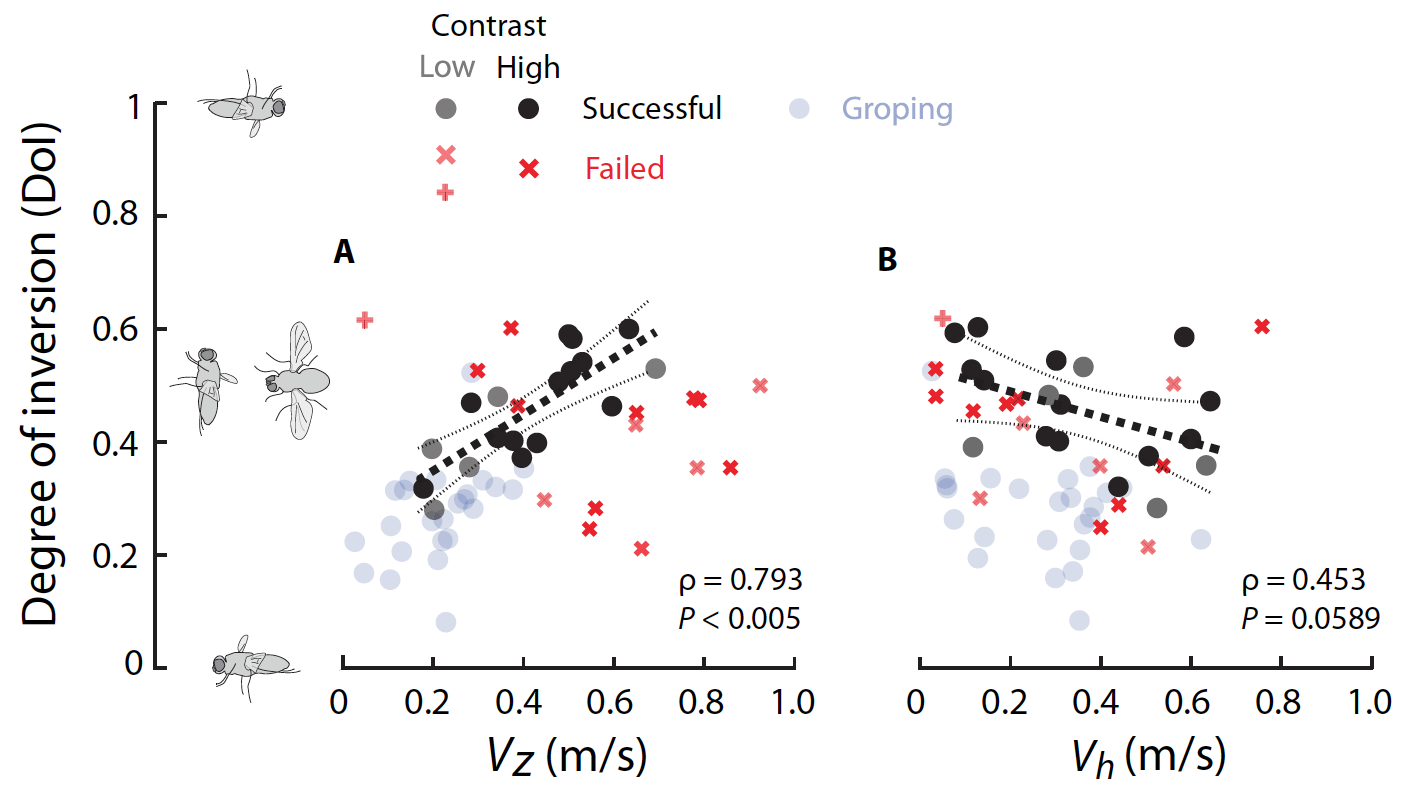 Imagem No. 2
Imagem No. 2Para quantificar quão bem o corpo da mosca foi orientado, foi calculado um grau de inversão (DoI do
grau de inversão ), que mede o grau em que o corpo da mosca está alinhado com sua orientação totalmente invertida antes do pouso. DoI varia de 0, o que significa a ausência de inversão do corpo, ou seja, abdômen até 1, o que significa inversão de todo o corpo, ou seja, barriga para cima. Em pousos bem-sucedidos, o DoI aumentou a uma velocidade vertical (
2A ), mas diminuiu a uma velocidade longitudinal (
2B ).
Essa observação indicou que as moscas precisavam rolar mais quando a velocidade de subida era maior ou quando a velocidade horizontal era menor. Na maioria dos desembarques malsucedidos (havia 15 no total), as moscas não foram viradas de cabeça para baixo antes do momento do pouso, em comparação com a posição das moscas que fizeram pousos bem-sucedidos.
A causa da falha pode ser a rotação prematura ou insuficiente do corpo antes do pouso. Assim, essas moscas não podiam pousar corretamente no teto, mas colidiam com ele.
Vídeo nº 7: falha no pouso devido a manobra rotacional muito cedo.Além disso, pousos malsucedidos também ocorreram devido à rotação muito precoce do corpo (vídeo nº 7), uma vez que uma inversão anterior levou a uma velocidade vertical insuficiente necessária para alcançar o teto (marcado com um “+” nos gráficos
2A e
2B ).
Vídeo nº 8: aterrissagem malsucedida devido à inversão fraca do corpo com alinhamento prematuro das pernas.Outro motivo para as falhas, apesar da inversão e velocidade corretas do movimento, foi o alinhamento tardio das patas, que levou a uma localização incorreta e, portanto, a um contato insuficientemente tenaz com a superfície (vídeo nº 8).
Vídeo nº 6: um exemplo de aterrissagem de contato no teto.Apesar de todas as perfurações e deficiências, algumas moscas ainda podem se recuperar e pousar com sucesso usando um pouso de contato. Nesse caso, as moscas voam com uma velocidade vertical baixa sob o teto, depois sentem a superfície usando as patas dianteiras e depois se agarram e aterrissam (vídeo nº 6).
Vídeo # 9: falha na aterrissagem devido à inversão fraca do corpo com ligeira rotação do corpo.Resumindo os dados obtidos das observações, os cientistas chegaram à conclusão de que os aspectos cinemáticos da aterrissagem da mosca contêm processos neurais muito mais diferentes do que se pensava anteriormente. A característica mais marcante ainda é a manobra rotacional. Resta apenas entender o que a provoca, ou melhor, quais sinais levam ao fato de que a mosca a usa para pousar.
Os primeiros a se lembrar, é claro, são os sinais visuais que as moscas recebem ao se aproximar do teto com uma velocidade linear composta por três componentes (
1C ): vertical (
V z ), longitudinal (
V x ) e lateral (
V y ).
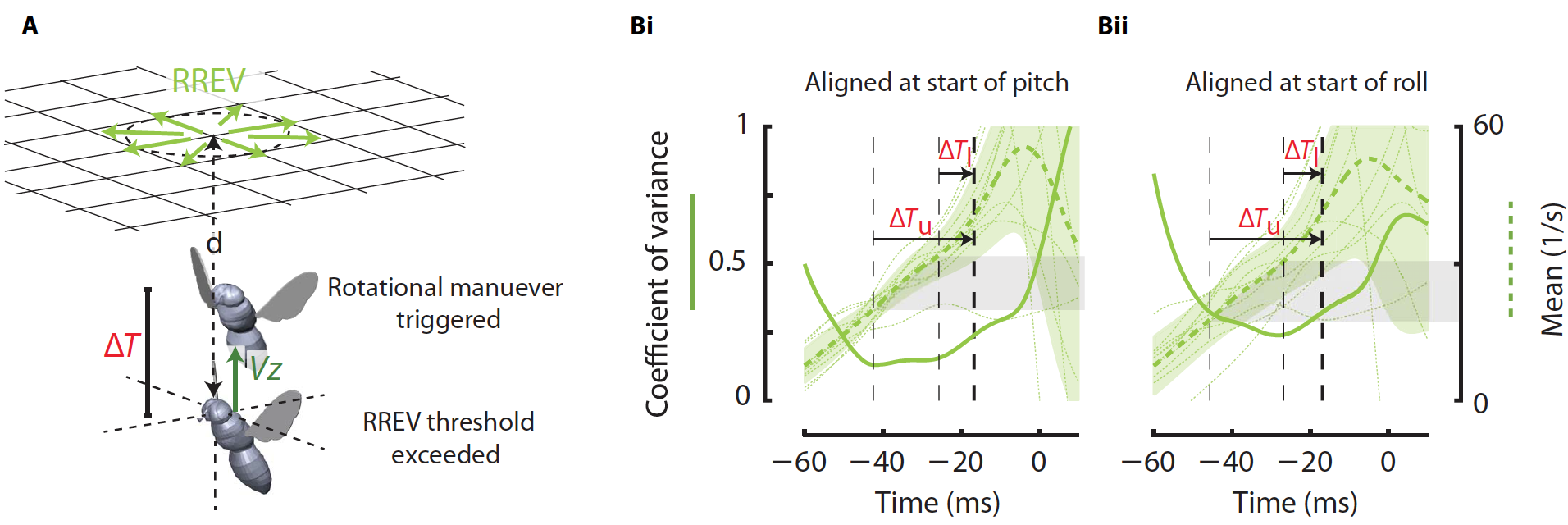 Imagem No. 3
Imagem No. 3Graças ao trabalho de seus antecessores, os pesquisadores conhecem com precisão os três principais tipos de pistas visuais necessárias para avaliar o movimento da mosca.
Primeiro, a taxa de expansão relativa da retina (
RREV ) devido a estímulos imóveis (
3A ). Este indicador pode ser calculado como a razão entre a taxa de aumento da meta e seu tamanho real na retina da mosca durante o movimento ascendente (
V z ). RREV também corresponde ao recíproco do tempo até a colisão (
t ). O RREV é considerado um importante sinal de percepção, que controla a velocidade da aproximação durante o pouso ou a caminhada em torno de obstáculos.
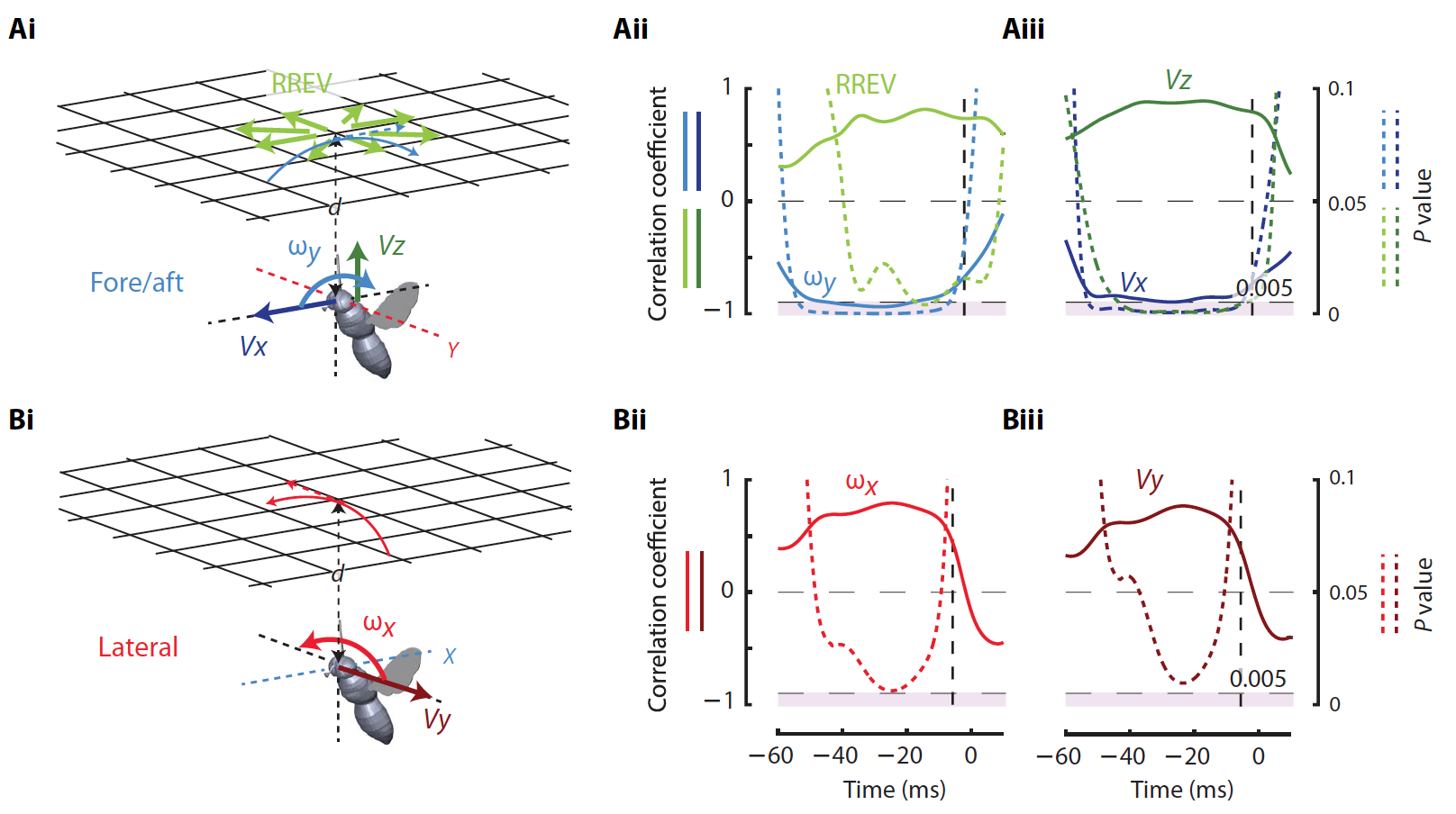 Imagem No. 4
Imagem No. 4Em segundo lugar, a velocidade angular relativa da direção longitudinal (
4Ai ) do teto na retina da mosca (ω
y ). Essas dicas visuais são o resultado de mover o corpo para frente / trás (
V x ), ou seja, na direção horizontal. Verificou-se anteriormente que são esses sinais que regulam o pouso em superfícies horizontais.
Em terceiro lugar, a velocidade angular transversal relativa do teto (ω
x ) na retina da mosca (
4Bi ) obtida como resultado do movimento lateral (
V y ).
Os pesquisadores sugerem que a manobra rotacional começa após um tempo fixo quando o sinal visual provocativo (sinal que leva à ação real) atinge um valor limite. Essa suposição nos permite avaliar a relação dos sinais acima e as manobras de movimento realizadas pela mosca durante o pouso.
O primeiro passo foi calcular as curvas de tempo do coeficiente de variação (CV) de cada um dos sinais visuais. As observações foram tomadas como base, durante a qual as moscas pousaram com sucesso no teto na primeira tentativa.
Se as manobras rotacionais forem iniciadas após algum atraso, quando o sinal visual atingir um valor limite, o CV desse sinal visual deverá ser mínimo. Além disso, deve ser menor do que o de outros sinais visuais não provocativos, ou seja, sinal visual provocativo deve ter a menor dispersão. Observações e cálculos mostraram que, dentre os três sinais testados, foi o RREV que apresentou o menor valor de CV no momento de virar a curva (15%) e rolar (25%), enquanto os outros dois sinais visuais apresentaram um CV significativamente maior (
3B ).
Isso significa que o RREV é o principal sinal visual que aciona o início de uma manobra rotacional durante um pouso invertido.
O valor de CV para RREV foi mínimo entre 7 ms (∆Tl) e 27ms (∆T
u ) antes do início da manobra rotacional. Consequentemente, o atraso visual DT entre o momento da percepção e o início da manobra estava nessa pequena faixa. Verificou-se também que o tempo crítico antes de uma colisão, abaixo do qual uma manobra rotacional é iniciada (para evitar uma colisão e aterrissar com sucesso), é de 31 a 53 ms. Para comparação, para moscas pousando em superfícies verticais, esse número é de 76 ms. Em outras palavras, ao pousar no teto, as moscas têm significativamente menos tempo para erro.
As manobras rotacionais, a julgar pelas observações, eram bastante variáveis em termos de velocidade de rotação e inclinação. Essa variabilidade pode indicar que a manobra rotacional é regulada não apenas pelo componente do tempo, mas também por outros sinais sensoriais.
As moscas usam sinais sensoriais para fornecer manobras rotacionais através de canais diretos e de feedback. O canal de comunicação direta emite comandos de controle espontâneos que causam mudanças transitórias significativas no movimento da asa. Essas mudanças afetam diretamente a amplitude da reação primária à manobra.
O canal de feedback fornece uma resposta compensatória que causa uma pequena mudança no movimento da asa. Tais mudanças afetam o amortecimento (supressão de vibração) e a estabilização da manobra.
O grau de influência de um ou outro sinal sensorial na manobra foi estimado revelando a correlação da velocidade máxima de rotação e rotação durante a manobra rotacional com os sinais sensoriais percebidos pelas moscas antes ou após o início das manobras.
Os sinais de sensor propostos incluem três visuais (RREV, ω
x e ω
y ), discutidos anteriormente, e três componentes da velocidade linear (
V x ,
V y e
V z ).
A análise de regressão linear mostrou que, por um longo período de tempo antes do início das manobras, a velocidade máxima de inclinação foi correlacionada positivamente com RREV (
4Aii ) e a velocidade vertical
V z (
4Aiii ), mas negativamente com a rotação longitudinal ω
y (
4Aii ) e a velocidade linear longitudinal
V x (
4Aiii ).
Por sua vez, as velocidades máximas de rotação correlacionaram-se positivamente com a rotação lateral ω
x (
4Bii ) e a velocidade linear lateral
Vy (
4Biii ) durante um período prolongado antes e após o início da manobra.
A análise também indicou que as moscas podem alterar a força da manobra rotacional, a fim de usar de maneira mais eficaz as vibrações corporais no momento do pouso, ou seja, a transmissão de um impulso linear para um angular.
Como as observações mostraram, a velocidade do tom diminuiu quando o pulso linear era alto, conforme indicado pela correlação negativa entre o nível do tom de pico e os sinais do sensor. Assim, em vez de arremessar, as moscas viram seu corpo ao contrário, aumentando a oscilação longitudinal do corpo com as patas e transmitindo um impulso linear direto ao momento angular do arremesso.
Também foi observado um aumento na velocidade do rolo quando o impulso linear lateral era alto, como indicado por uma correlação positiva entre a velocidade de pico do rolo e os sinais sensoriais. Tal correlação inversa pode ocorrer em situações em que as moscas precisam de uma distância maior para elevar as patas ipsilaterais suficientemente alto e atingir o teto para agitar ainda mais o corpo.
Não se esqueça do atributo mais importante dos voos para moscas, ou seja, sobre asas. Os pesquisadores analisaram a cinemática das asas das moscas durante um pouso no teto, uma vez que são as asas que criam os vários impulsos aerodinâmicos necessários para as manobras bem-sucedidas.
Observações nas asas de moscas azuis revelaram várias mudanças ocorridas no momento da manobra.
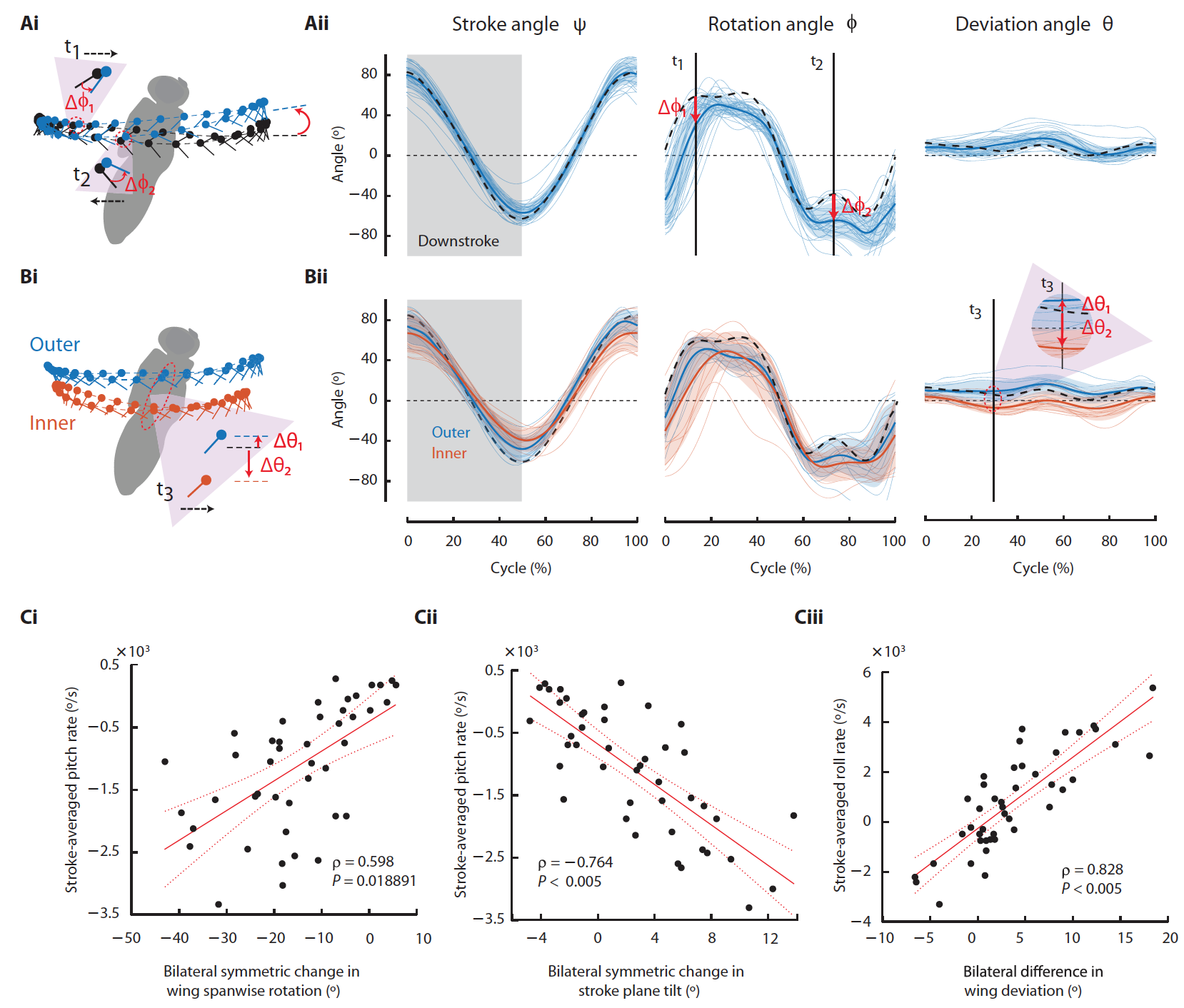 Imagem No. 5
Imagem No. 5A primeira coisa que foi descoberta foi uma alteração simétrica bilateral na rotação longitudinal da asa (
5A e
5Ci ) e alterações simétricas bilaterais no ângulo do plano da asa (
5A e
5Cii ), que se correlacionaram fortemente com a frequência de afinação. Também houve alterações na inclinação da asa (
5B e
Ciii ), que se correlacionaram fortemente com a velocidade de rotação. Além disso, também houve alterações na amplitude dos retalhos e na rotação da asa média, o que contribui para o rolamento.
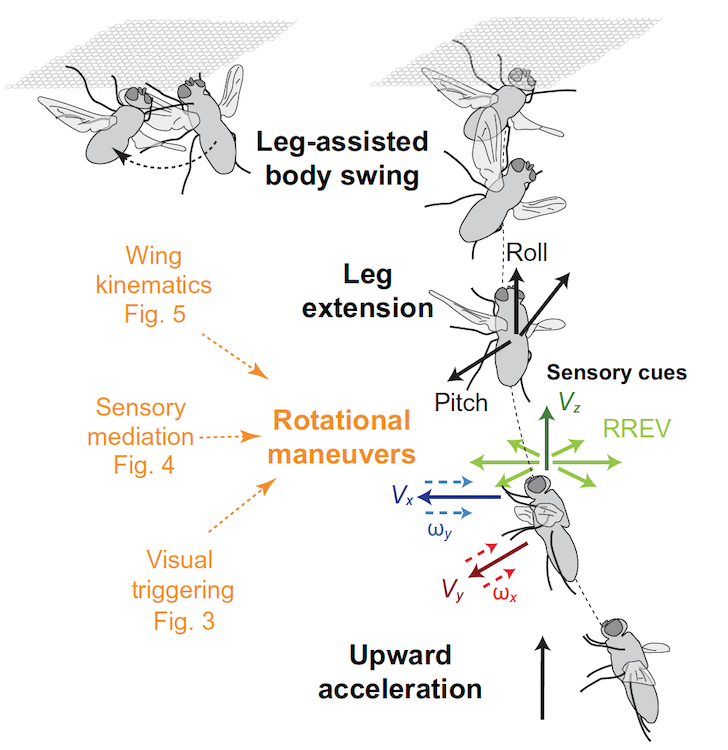 Imagem Nº 6Para um conhecimento mais detalhado das nuances do estudo, recomendo que você analise o relatório dos cientistas e materiais adicionais .
Imagem Nº 6Para um conhecimento mais detalhado das nuances do estudo, recomendo que você analise o relatório dos cientistas e materiais adicionais .Epílogo
Resumindo todas as observações e resultados dos cálculos, os pesquisadores chegaram à conclusão de que o pouso invertido no teto é devido a uma sequência bem coordenada de módulos comportamentais (diagrama acima).A aterrissagem no teto pode incluir processos neurais que não apenas computam as informações de codificação RREV sobre o tempo antes da colisão, mas também outros sinais sensoriais que supostamente codificam o movimento linear de vários eixos do corpo.No momento, os cientistas ainda não conseguem responder com precisão a questão de quais sinais sensoriais levam a certos movimentos durante a manobra. Mas o trabalho realizado inequivocamente fornece a base para futuras pesquisas.Observações de insetos e pássaros sempre serviram de inspiração para o homem criar aeronaves. Estudar moscas azuis não é exceção. Os cientistas acreditam que suas observações indicam que, para a implementação bem-sucedida de um veículo robótico ou tripulado capaz de pousar em superfícies invertidas, é necessária uma forte integração dos processos computacionais e mecânicos. Por exemplo, pode ser uma combinação de esquemas de reconhecimento rápido de imagens e um sistema para controlar a posição do dispositivo, além de um sistema de estabilização que voa realizado ao vibrar o corpo nas pernas.Uma vez que um homem só podia sonhar em voar, agora é uma realidade. Mas somos apenas convidados neste ambiente alheios a nós, que é nativo de muitos organismos vivos, e ainda temos muito a entender, descobrir e explorar antes de nos tornarmos seus vizinhos de verdade nas nuvens.Obrigado pela atenção, continuem curiosos e tenham uma boa semana de trabalho, pessoal! :)
Obrigado por ficar conosco. Você gosta dos nossos artigos? Deseja ver materiais mais interessantes? Ajude-nos fazendo um pedido ou recomendando a seus amigos, um
desconto de 30% para os usuários da Habr em um servidor analógico exclusivo que inventamos para você: Toda a verdade sobre o VPS (KVM) E5-2650 v4 (6 núcleos) 10GB DDR4 240GB SSD 1Gbps de US $ 20 ou como dividir o servidor? (as opções estão disponíveis com RAID1 e RAID10, até 24 núcleos e até 40GB DDR4).Dell R730xd 2 vezes mais barato?Somente temos 2 TVs Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV a partir de US $ 199 na Holanda! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - a partir de US $ 99! Leia sobre Como criar um prédio de infraestrutura. classe usando servidores Dell R730xd E5-2650 v4 custando 9.000 euros por um centavo?