Para começar, vídeo do youtube para inspiração:
Atenção: o projeto no vídeo é apenas uma amostra que pode ser realizada de acordo com o tutorial do artigo sobre visão estéreo e “virada de cabeça”. Tanques com controle remoto xbox não estão incluídos.
Apesar da clareza, a escassa história do autor do projeto no vídeo e a disponibilidade de links, imediatamente para descobrir como tudo funciona, não é fácil. Se você deseja coletar algo semelhante e em um formato muito mais conveniente, é recomendável ler.
* Farei uma reserva imediatamente, a pessoa no vídeo no YouTube não é familiar para mim, não transmiti dados secretos, qual é o estado do projeto dele agora, não sei.
** Não controlaremos o movimento do robô na framboesa na superfície através do controle remoto do xbox, isso pode ser tratado de forma independente.
*** Por favor, não jogue tênis, pois o projeto ainda está em desenvolvimento.
Então, estamos interessados em duas coisas:
- como obter uma imagem estéreo no telefone usando um capacete;
- como controlar os servos girando a cabeça.
O conceito usado no vídeo, se resumido, fica assim:
- 2 raspberry pi enviam fluxos de vídeo para a rede de suas câmeras via serviços webrtc;
- o telefone (no capacete) aceita fluxos em 2 aplicativos idênticos no telefone - aplicativos flutuantes.
- ao mesmo tempo, o telefone controla os servidores conectados à framboesa.
Tudo é simples. Mas o diablo, como você sabe, está nos detalhes e inconvenientes, a saber:
- você precisa executar 2 raspberry, monitorar as configurações de 2 câmeras, power raspberry * 2.
- aplicativos flutuantes constantemente deslizam no telefone, você precisa alinhar as imagens na tela.
- ...
Portanto, transferiremos para o stereopi, felizmente, ele apareceu nas lojas russas (espero que não desapareça após este post):
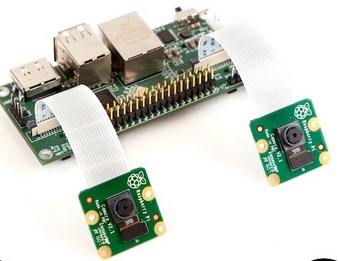 Stereopi
Stereopi é o desenvolvimento de nosso compatriota, que agora está conquistando ativamente o mercado.
Seu charme segue o nome - você pode conectar duas câmeras CSI raspberry pi ao mesmo tempo. Ao mesmo tempo, tudo isso funciona com base em um módulo de computação raspberry pi. Infelizmente, o módulo em si não está incluído no pacote; você deve comprá-lo.
Sobre o stereopi, existem artigos sobre Habré.
A partir dele, precisaremos de 2 fluxos de vídeo e controle de servidores através do GPIO.
Como base para o stereopi, usaremos o Raspberry Pi Compute Module 3+.
Preparação para Stereopi
Depois de montar o stereopi (insira o módulo de computação no stereopi, câmeras), preencha o software.
Usamos a imagem pronta para o módulo de computação raspberry pi - Raspbian (estiramento). Está disponível em stereopi.com - Imagem
Raspbian Stretch OpenCV, Google DriveEncha com framboesa.
Se houver dificuldades com o preenchimento, outros vão para o
wiki stereopi .
Instalando o webrtc.
Instale o software webrtc no stereopi. Parcialmente, o material de instalação é retirado desta página:
Instalação para ARM (Raspberry Pi)
Evitaremos comentários desnecessários que já estão na página acima e simplesmente instalaremos tudo o que for necessário.
curl http://www.linux-projects.org/listing/uv4l_repo/lpkey.asc | sudo apt-key add - sudo nano /etc/apt/sources.list deb http://www.linux-projects.org/listing/uv4l_repo/raspbian/stretch stretch main sudo apt-get update sudo apt-get install uv4l uv4l-raspicam sudo apt-get install uv4l-raspicam-extras sudo raspi-config Anvanced Options Memory Split 256 enter sudo apt-get install uv4l-server uv4l-uvc uv4l-xscreen uv4l-mjpegstream uv4l-dummy uv4l-raspidisp sudo apt-get install uv4l-webrtc sudo apt-get install uv4l-demos sudo apt-get install uv4l-xmpp-bridge sudo apt-get install uv4l-raspidisp-extras
Agora você precisa (conforme as instruções) gerar chaves ssl, pois o Chrome pode não mostrar o vídeo pela conexão http (somente via https):
openssl genrsa -out selfsign.key 2048 && openssl req -new -x509 -key selfsign.key -out selfsign.crt -sha256
* ao gerar chaves, perguntas serão feitas sobre a empresa, região etc. - Você pode respondê-las arbitrariamente.
As chaves geradas (selfsign.key e selfsign.crt aparecerão na pasta atual) devem ser colocadas na pasta:
/etc/ssl/private/
Todas as configurações do webrtc são armazenadas em 2 arquivos:
/etc/uv4l/uv4l-raspicam.conf /etc/uv4l/uv4l-raspidisp.conf
Para não se cansar de listar itens em arquivos que precisam ser descomentados ou
para corrigir, sobrescreva os arquivos de configuração com o uv4l-raspicam.conf e o uv4l-raspidisp.conf.
Reinicie o raspberry e efetue login
no ip raspberry usando o chrome:
https://192.168.1.100:8080
O WebRTC é um grande fã de possibilidades, mas nos limitaremos a uma coisa: iremos para a guia webrtc:
Agora verifique se o vídeo funciona com stereopi.
Pressione o botão “Ligar” na parte inferior da página da web no telefone.
Um vídeo das câmeras estéreo deve aparecer.
Clique no botão "Tela cheia" abaixo da janela com a imagem das câmeras da web:
* Não recarregue a página no telefone! Se isso ainda aconteceu, você precisa matar os processos na framboesa:
sudo killall uv4l
E reinicie os serviços:
sudo service uv4l_raspidisp restart sudo service uv4l_raspicam restart
Então, novamente, na página
do navegador
do telefone, clique em "Ligar".
** A chamada não funcionará se nenhuma câmera estiver conectada à framboesa.
Nós vamos lidar com os servos.
Para gerenciar os servos em framboesa a partir do telefone, você precisa de um código que será executado em framboesa e ações no telefone.
Mas primeiro, vamos decidir sobre os servos. O vídeo do YouTube usa servos conectados diretamente ao gpio raspberry. Como os servos são de baixa potência, você provavelmente pode pendurar 2 servos no gpio raspberry. Esses truques podem ser facilmente executados em servidores sg-90. Eles não são exigentes em nutrição, mas também não são particularmente bons para cargas. Em princípio, eles devem ser suficientes para manter uma suspensão com duas câmeras da stereopi. O próprio cardan pode ser comprado no mesmo aliexpress, para a pesquisa “pan-tilt”. No entanto, esses servos também têm um sinal negativo negativo - eles "tremem de medo". É esse efeito que o autor do vídeo do YouTube observa. Por que isso está acontecendo e o que fazer com isso não será considerado aqui.
No nosso caso, os servos mg-996n e a junta do robô são usados, o que espero que ele não precise no futuro próximo.
* O Mg-996N não "treme".
O Stereopi possui um layout gpio semelhante ao padrão do
raspberry 3 .
Portanto, os fios de sinal dos servos irão para gpio, e é melhor usar 5V não da framboesa, mas de lado, combine o serviço GND com o GND raspberry e o GND de uma fonte externa.
Agora, o mais importante é o software
Em framboesa, precisamos de um demônio, mas não de Lermontov, mas de pigpio. Você não precisa executar nenhuma etapa especial para configurá-lo. O principal é saber que ele está travado na porta 8888 e você deve primeiro executá-lo:
sudo systemctl start pigpiod.service
Em seguida, crie um arquivo que gerencie os servidores, recebendo dados do soquete, que ele próprio cria:
datachannel_server_tele.py Os comentários são deixados no texto para entender de onde veio o código e o que mais pode ser corrigido.
O significado geral do código é o seguinte:
- no início, os servos são definidos na posição do meio.
- Existem 3 pinos (gpio) nos quais os fios de sinal dos servos estão pendurados. No nosso caso, 2 pinos (suspensão de 2 servos).
- O gpio é controlado através da aplicação de um sinal no intervalo PWM de 1000 a 2000.
- chega uma linha do telefone, que é analisada por json (você pode fazer outra coisa) e, em seguida, os valores xey são tirados dela. Em seguida, esses valores são convertidos em valores PWM para girar os servos.
* O problema é que x assume valores de 0 a 360 (o telefone gira em torno de seu eixo), como y. E esses valores devem estar vinculados ao PWM, que aceita valores de 1000 a 2000. O código usa a fórmula pitchPW = key1 * 5 + 500. 500 é o valor mínimo do servo PWM (embora a suposição seja 1000 no código). E a multiplicação por 5 é condicional. Esse ponto precisa ser aprimorado, pois em x = 360, o valor do PWM é muitas vezes maior que o máximo. Os servos são protegidos de exceder os ângulos máximos de rotação para evitar danos, mas isso não é muito agradável.
Execute o código no terminal raspberry:
sudo python3 datachannel_server_tele.py
Ativaremos o GPS no telefone (cada telefone tem um ícone correspondente nas configurações) e passaremos o ip raspberry.
https://192.168.1.100:8080/stream/webrtc
Clique em "Ligar". Após a conexão ser estabelecida, no telefone do navegador da página, marque "enviar ângulos de orientação do dispositivo alfa, beta, gama".
Os valores x irão para o terminal com o script. E, se você girar o telefone, eles mudarão.
Servos também se moverão.
* Atualmente um deles (o segundo está comentado).
Dos bons bônus, o webrtc também oferece a oportunidade :
- crie uma aparência de um telebridge entre o telefone e a framboesa (seu interlocutor será volumoso),
- transmitir som nas duas direções (não testado, mas levado em consideração nas configurações),
- Transmitir para uma página da web, youtube em 3d.
- crie uma teleconferência de vários amigos (jitsi meet).
- altere as configurações da câmera rapidamente através da interface da Web (por que girar! &? não funciona).
Agora sobre o triste.
1. Shalturit, conectando duas câmeras diferentes com olhos de peixe na régua da escola, não funcionou. Acontece que os peixes têm olhos diferentes. Precisamos do mesmo tipo de câmera:

2. Não foi possível expandir a imagem das câmeras estéreo através das configurações da interface da web webrtc. Enquanto as fotos são estreitas, como as calças de um francês.

3. O servo MG996N é limitado a -180 ângulos de rotação. De fato - 160. Talvez alguém irá aconselhar com 360, mas sem rotação contínua.
4. O software requer moagem.
5. A chamada às vezes cai, você precisa se reconectar.
Aplicação: