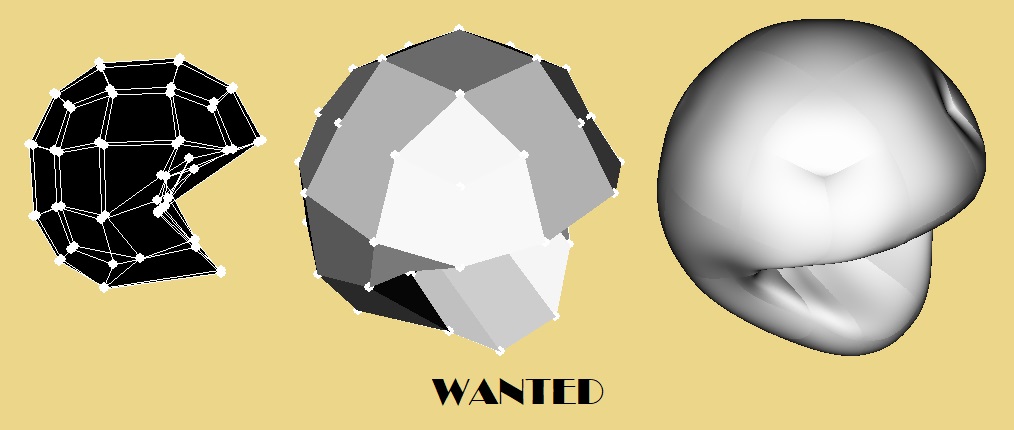
Há cerca de um mês, comecei a aprender Python com o livro Dawson e acordei profundamente no processo de escrever meu jogo no pygame. TK era tal que parecia mais promissor fazer um jogo com gráficos pseudo-tridimensionais, colocando as superfícies salvas dos splines 3D em sprites. Vou escrever sobre o último.
Portanto, existem polígonos (é mais fácil trabalhar com quadrângulos) nos quais queremos esticar superfícies cúbicas para que elas se encaixem perfeitamente - essas superfícies são estrias.
É mais conveniente apresentar um spline para um polígono como uma função
Aqui
- polinômios cúbicos que satisfazem algumas condições de contorno (na figura abaixo - curvas verde claro e vermelho e condições derivadas-iniciais - vetores lilás e azul); uev variam de 0 a 1.
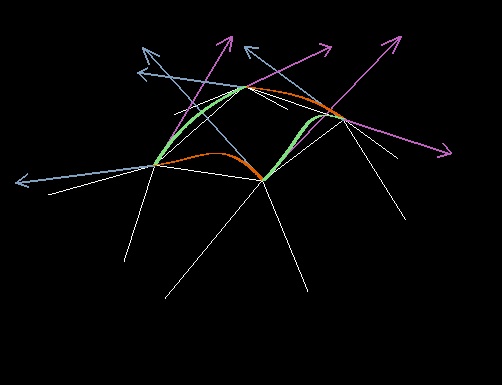
Nesta interpretação, alguns graus são perdidos (produtos de 2 e 3 graus de parâmetros), mas os coeficientes polinomiais podem ser encontrados especificando apenas 12 vetores de condições iniciais (4 pontos poligonais e vetores derivativos em relação a u e v para cada ponto). Nas junções, splines coincidem se condições iniciais semelhantes forem definidas para polígonos vizinhos (os vetores derivativos devem ser colineares, a superfície passa pelos mesmos pontos do polígono).
Um problema - a derivada com essa afirmação do problema em toda a borda pode não coincidir - haverá pequenos artefatos nas junções. Você pode pensar em mais 4 condições para corrigir isso e adicionar cuidadosamente outro termo à fórmula
que não estraga as fronteiras, mas esse é um tópico para um artigo separado.
Uma alternativa é a
superfície de Bezier , mas propõe definir 16 parâmetros de significado matemático incompreensível (para mim), ou seja, supõe-se que o artista trabalhe com suas próprias mãos. Isso não é muito adequado para mim, então uma bicicleta com muletas segue.
Os coeficientes (1) são mais facilmente calculados encontrando a matriz inversa à matriz de valores e derivadas nos cantos e multiplicando pelas condições de entrada (três vezes, para cada coordenada). A matriz pode ser esta:
Texto oculto[[1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], #g (0,0)
[1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 1, 0], #g (1,0)
[1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0], #g (0,1)
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1], # g (1,1)
[0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0], # dg / du (0,0)
[0, 0, 0, 0, 1, 0, 0, 0, 2, 0, 3, 0], # dg / du (1,0)
[0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0], # dg / du (0,1)
[0, 0, 0, 0, 1, 1, 1, 1, 2, 2, 3, 3], # dg / du (1,1)
[0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0], # dg / dv (0,0)
[0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 1], # dg / dv (1,0)
[0, 1, 2, 3, 0, 0, 0, 0, 0, 0, 0, 0], # dg / dv (0,1)
[0, 1, 2, 3, 0, 1, 2, 3, 0, 1, 0, 1]] # dg / dv (1,1)
O NumPy faz um excelente trabalho nisso.
Uma questão permanece - onde obter os vetores dos derivativos. Supõe-se que eles devam ser selecionados de alguma forma com base na posição dos pontos vizinhos (para o polígono) e por motivos de suavidade.
Para mim, pessoalmente, ainda era completamente contra-intuitivo como lidar com o comprimento do vetor derivado. A direção é compreensível, mas o comprimento?
Como resultado, nasceu o seguinte algoritmo:
1. Na primeira etapa, ocorre uma classificação de pontos. No gráfico (que pontos dos polígonos e suas conexões especificam), os ciclos de comprimento 4 são pesquisados e armazenados e, além disso, são registrados os vizinhos mais adequados para a função de estender as arestas do polígono (é determinado antecipadamente quais arestas correspondem a uma alteração no parâmetro u e qual corresponde a v). Aqui está um pedaço de código que pesquisa, classifica e lembra os vizinhos pelo 0º ponto de um ciclo:
Texto oculto""" : cykle[5] cykle[7] cykle[4]--cykle[0] --u-- cykle[1]-cykle[6] |v |v cykle[10]-cykle[3] --u-- cykle[2]-cykle[8] cykle[11] cykle[9] """ sosed = [] for i in range(0, N): if self.connects[i][ind] == 1 and i != cykle[0] and i != cykle[1] and i != cykle[3]: sosed += [i]
Além disso, ao construir o spline, a derivada ao longo da aresta (por exemplo, com relação ao parâmetro u) no ponto do polígono é selecionada com base na localização de dois pontos da aresta e um ponto adjacente (sejam os pontos vec1, vec2 e vec3; o ponto no qual a derivada é procurada é o segundo).
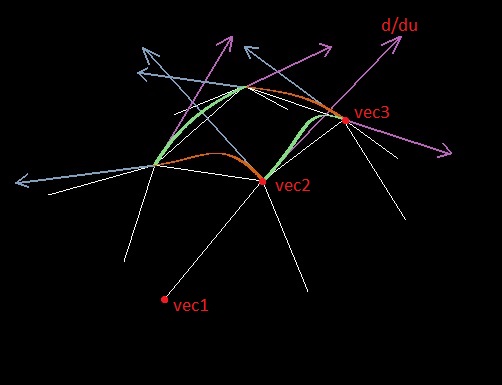
Inicialmente, tentei usar o vetor normalizado vec3 - vec1 (como apliquei o teorema de Lagrange) para esse papel, mas surgiram problemas precisamente com o comprimento do vetor derivado - tornar uma constante uma má ideia.
Digressão lírica:Para uma pequena ilustração do que o vetor derivado é na versão paramétrica, passamos a uma analogia bidimensional simples - aqui está uma parte de um arco circular:
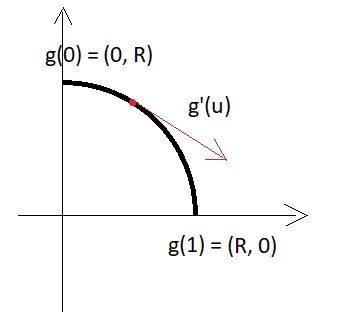
I.e. módulo derivativo = R * pi / 2 e, de um modo geral, depende do tamanho da peça do arco, que definimos através do parâmetro
O que fazer com isso agora? Leo Tolstoi nos disse que tudo é redondo = bom; portanto, se definirmos a derivada em um ponto como se desejássemos construir um arco lá, obteremos uma curva suave e bonita.
O fim da digressão.A segunda etapa da pesquisa derivada:
2. Através de nossos três pontos vec1, vec2, vec3, construímos um plano; nesse plano, procuramos um círculo que passa por todos os três pontos. A derivada desejada será direcionada ao longo da tangente ao círculo no ponto vec2, e o módulo do vetor da derivada deve ser igual ao produto do raio do círculo e do ângulo do setor, que formam dois pontos da face do polígono (semelhante à nossa analogia simples e plana a partir da digressão lírica).
Tudo parece simples, eis o código da função, por exemplo (o NumPy é usado novamente):
não é um código, mas ... def create_dd(vec1, vec2, tuda, vec3): """ 1-2 3 == 1"""
Bem, em geral, tudo funciona de alguma forma. Para demonstração, peguei um cubo 5x5x5 e alterei a posição dos pontos com um randomizador: