
Em uma publicação anterior, falamos sobre como os barramentos e protocolos funcionam na automação industrial. Desta vez, nos concentramos em soluções de trabalho modernas: vamos ver quais protocolos são usados em sistemas em todo o mundo. Considere a tecnologia das empresas alemãs Beckhoff e Siemens, Austrian B&R, American Rockwell Automation e Russian Fastwel. E também estudaremos soluções universais que não estão vinculadas a um fabricante específico, como EtherCAT e CAN.
No final do artigo, haverá uma tabela comparativa com as características dos protocolos EtherCAT, POWERLINK, PROFINET, EtherNet / IP e ModbusTCP.
Não incluímos os protocolos PRP, HSR, OPC UA e outros, como Neles, em Habré, já existem excelentes artigos de nossos colegas engenheiros envolvidos no desenvolvimento de sistemas de automação industrial. Por exemplo, "Protocolos" sem redundância "PRP e HSR" e "Gateways de protocolos de troca industrial para Linux. Construa você mesmo . "
Para começar, definimos a terminologia: Ethernet Industrial = rede industrial, Fieldbus = barramento de campo. Ocorre confusão na automação industrial russa em termos de fieldbus e rede industrial de baixo nível. Freqüentemente, esses termos são combinados em um único conceito vago de "nível inferior", que é chamado de barramento de campo e de barramento de nível inferior, embora possa não ser um barramento.
PorqueEssa confusão provavelmente ocorre devido ao fato de que em muitos controladores modernos a conexão dos módulos de E / S é frequentemente implementada usando o backplane ou o barramento físico. Ou seja, alguns contatos e conectores de barramento são usados para combinar vários módulos em uma única unidade. Mas esses nós, por sua vez, podem ser interconectados por uma rede industrial e um barramento de campo. Existe uma clara separação na terminologia ocidental: uma rede é uma rede, um barramento é um barramento. O primeiro é indicado pelo termo Industrial Ethernet, o segundo por Fieldbus. O artigo propõe usar o termo “rede industrial” e o termo “barramento de campo”, respectivamente, para esses conceitos.
Padrão de Rede Industrial EtherCAT, desenvolvido por Beckhoff
O protocolo EtherCAT e a rede industrial são talvez um dos métodos mais rápidos de transferência de dados em sistemas de automação atualmente. A rede EtherCAT foi usada com sucesso em sistemas de automação distribuídos, onde os nós em interação são espaçados a longa distância.
O protocolo EtherCAT usa quadros Ethernet padrão para transmitir seus telegramas, portanto, a compatibilidade com qualquer equipamento Ethernet padrão é mantida e, de fato, a recepção e transmissão de dados podem ser organizadas em qualquer controlador Ethernet, se o software correspondente estiver disponível.
 Controlador Beckhoff com um conjunto de módulos de E / S. Fonte: www.beckhoff.de
Controlador Beckhoff com um conjunto de módulos de E / S. Fonte: www.beckhoff.deA especificação do protocolo é aberta e acessível, mas apenas dentro da estrutura da associação de desenvolvimento - EtherCAT Technology Group.
Eis como o EtherCAT funciona (a visão é fascinante, como o jogo Zuma Inca):
A alta taxa de câmbio neste protocolo - e podemos falar sobre unidades de microssegundos - é percebida devido ao fato de os desenvolvedores se recusarem a trocar usando telegramas enviados diretamente para um dispositivo específico. Em vez disso, um telegrama é enviado para a rede EtherCAT, endereçado a todos os dispositivos ao mesmo tempo, cada um dos nós subordinados para coletar e transmitir informações (geralmente chamados de USO - um dispositivo de comunicação com um objeto) pega nele rapidamente os dados que foram destinados a ele e os insere. em um telegrama os dados que ele está pronto para fornecer para troca. Depois disso, o telegrama é enviado para o próximo nó subordinado, onde a mesma operação ocorre. Depois de passar todo o ODR, o telegrama é retornado ao controlador principal, que, com base nos dados recebidos dos dispositivos escravos, implementa a lógica de controle, interagindo novamente por meio de um telegrama com os nós escravos que emitem um sinal de controle para o equipamento.
Uma rede EtherCAT pode ter qualquer topologia, mas na verdade sempre será um anel - devido ao uso do modo full duplex e dois conectores Ethernet. Assim, o telegrama será sempre transmitido sequencialmente para cada dispositivo no barramento.
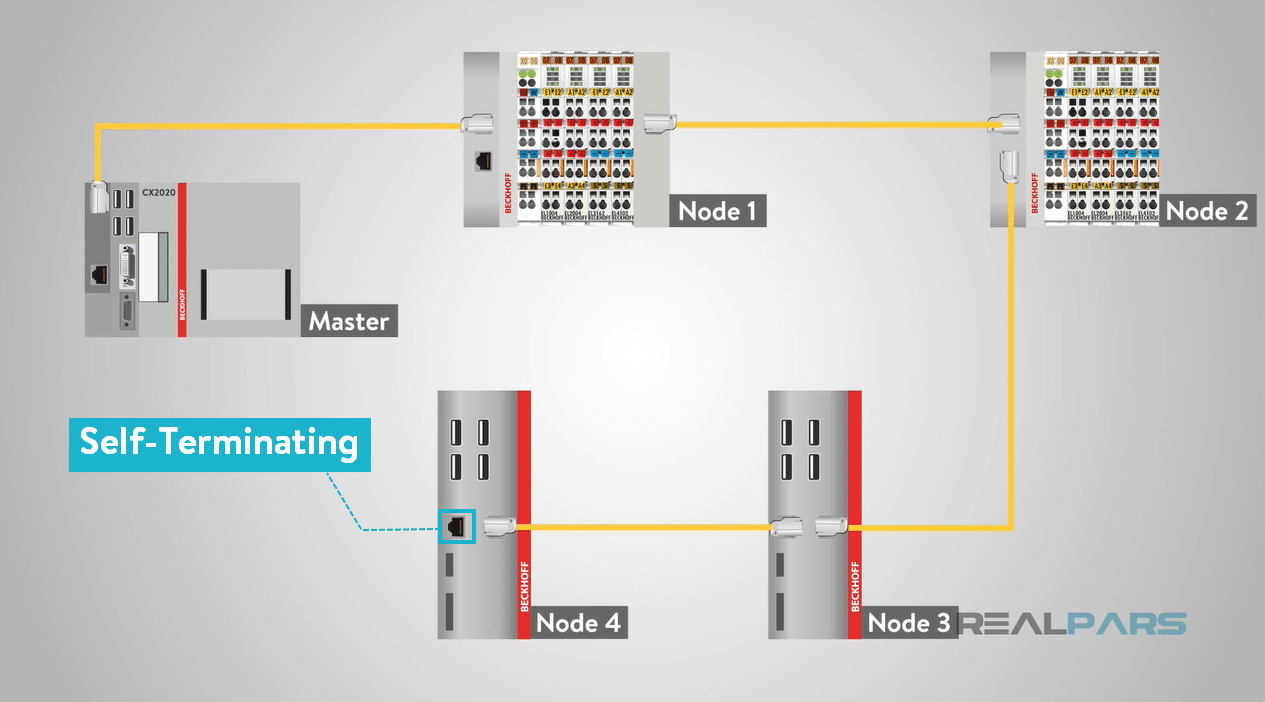 Representação esquemática de uma rede Ethercat com vários nós. Fonte: realpars.com
Representação esquemática de uma rede Ethercat com vários nós. Fonte: realpars.comA propósito, a especificação EtherCAT não contém limitações da camada física 100Base-TX, portanto, a implementação do protocolo é possível com base em linhas ópticas e de gigabit.
Siemens Open Industry Networks e padrões PROFIBUS / NET
A preocupação alemã da Siemens é conhecida por seus controladores lógicos programáveis (PLCs), usados em todo o mundo.
A troca de dados entre nós de um sistema automatizado sob o controle de equipamentos Siemens é implementada tanto através de um barramento de campo chamado PROFIBUS quanto na rede industrial PROFINET.
O barramento PROFIBUS utiliza um cabo especial de dois fios com conectores DB-9. Na Siemens, é roxo, mas, na prática, encontramos outros :). Para conectar vários nós, um conector pode conectar dois cabos. Ele também possui uma chave para um resistor de terminal. O resistor do terminal deve ser ligado nos dispositivos finais da rede, portanto, é relatado que este é o primeiro ou o último dispositivo e, depois dele, não há nada, apenas escuridão e vazio (todos os rs485 funcionam dessa maneira). Se você ligar o resistor no conector intermediário, a seção a seguir será desconectada.
 Cabo PROFIBUS com conectores. Fonte: VIPA ControlsAmerica
Cabo PROFIBUS com conectores. Fonte: VIPA ControlsAmericaA rede PROFINET utiliza um cabo analógico de um par trançado, geralmente com conectores RJ-45, o cabo é pintado de verde. Se a topologia do PROFIBUS é um barramento, a topologia da rede PROFINET pode ser qualquer coisa: pelo menos um anel, pelo menos uma estrela, pelo menos uma árvore, pelo menos todos juntos.
 Controlador Siemens com cabo PROFINET conectado. Fonte: w3.siemens.com
Controlador Siemens com cabo PROFINET conectado. Fonte: w3.siemens.comExistem vários protocolos de comunicação no barramento PROFIBUS e na rede PROFINET.
Para PROFIBUS:
- PROFIBUS DP - a implementação deste protocolo implica a comunicação com escravos remotos, no caso do PROFINET, o protocolo PROFINET IO corresponde a este protocolo.
- PROFIBUS PA - é essencialmente o mesmo PROFIBUS DP, usado apenas para versões à prova de explosão de dados e transmissão de energia (analógico do PROFIBUS DP com outras propriedades físicas). Para o PROFINET, ainda não existe um protocolo à prova de explosão por analogia com o PROFIBUS.
- PROFIBUS FMS - projetado para trocar dados com sistemas de outros fabricantes que não podem usar o PROFIBUS DP. O equivalente do PROFIBUS FMS na rede PROFINET é o protocolo PROFINET CBA.
Para PROFINET:
- PROFINET IO;
- PROFINET CBA.
O protocolo PROFINET IO é dividido em várias classes:
- PROFINET NRT (sem tempo real) - usado em aplicações onde os parâmetros de tempo não são críticos. Ele usa Ethernet TCP / IP e também UDP / IP.
- PROFINET RT (tempo real) - aqui a troca de dados de entrada / saída é implementada usando quadros Ethernet, mas os dados de diagnóstico e comunicação ainda são transmitidos via UDP / IP.
- PROFINET IRT (tempo real isócrono) - Este protocolo foi desenvolvido especificamente para aplicações de controle de movimento e inclui a fase isócrona de transferência de dados.
Quanto à implementação do protocolo PROFINET IRT em tempo real, dois canais de comunicação são alocados para comunicação com dispositivos remotos: isócrono e assíncrono. Um canal isócrono com duração fixa de ciclo de troca de tempo usa sincronização de relógio e transmite dados críticos de tempo; telegramas de segundo nível são usados para transmissão. A duração da transmissão no canal isócrono não excede 1 milissegundo.
No canal assíncrono, são transmitidos os chamados dados em tempo real, que também são endereçados pelo endereço MAC. Além disso, várias informações de diagnóstico e auxiliares já são transmitidas por TCP / IP. Nem dados em tempo real, muito menos outras informações, é claro, não podem interromper o ciclo isócrono.
Um conjunto expandido de funções PROFINET IO não é necessário para todos os sistemas de automação industrial; portanto, este protocolo é escalado para um projeto específico, levando em consideração as classes de conformidade ou de conformidade: CC-A, CC-B, CC-CC. As classes de conformidade permitem selecionar dispositivos de campo e componentes de tronco com a funcionalidade mínima necessária.
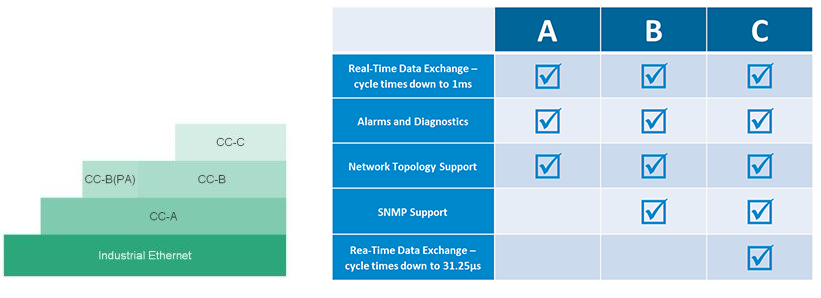 Fonte: Lição universitária PROFINET
Fonte: Lição universitária PROFINETO segundo protocolo de comunicação na rede PROFINET - PROFINET CBA - é usado para organizar a comunicação industrial entre equipamentos de diferentes fabricantes. A principal unidade de produção nos sistemas CBA é uma certa entidade chamada componente. Esse componente geralmente é uma combinação das partes mecânicas, elétricas e eletrônicas do dispositivo ou instalação, bem como o software aplicativo correspondente. Para cada componente, é selecionado um módulo de software que contém uma descrição completa da interface desse componente, de acordo com os requisitos da norma PROFINET. Em seguida, esses módulos de software são usados para trocar dados com dispositivos.
Protocolo POWERLINK Ethernet da B&R
O protocolo Powerlink foi desenvolvido pela empresa austríaca B&R no início dos anos 2000. Esta é outra implementação do protocolo em tempo real sobre Ethernet. A especificação do protocolo está disponível e distribuída livremente.
A tecnologia Powerlink usa o mecanismo da chamada pesquisa mista, quando toda a interação entre dispositivos é dividida em várias fases. Dados particularmente críticos são transmitidos na fase de troca isócrona, para a qual o tempo de resposta necessário está configurado, o restante dos dados será transmitido o mais longe possível na fase assíncrona.
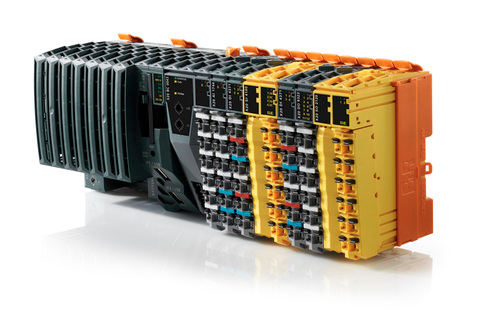 Controlador B&R com um conjunto de módulos de E / S. Fonte: br-automation.com
Controlador B&R com um conjunto de módulos de E / S. Fonte: br-automation.comInicialmente, o protocolo foi implementado no topo da camada física 100Base-TX, mas uma implementação de gigabit foi desenvolvida posteriormente.
O protocolo Powerlink usa um mecanismo de planejamento de troca. Um determinado token ou mensagem de controle é enviado para a rede, com a ajuda dele, é determinado qual dos dispositivos atualmente tem permissão para trocar dados. Somente um dispositivo pode ter acesso à troca a qualquer momento.
 Representação esquemática de uma rede Ethernet POWERLINK com vários nós.
Representação esquemática de uma rede Ethernet POWERLINK com vários nós.Na fase isócrona, o controlador de polling envia sequencialmente uma solicitação para cada nó do qual os dados críticos devem ser recebidos.
A fase isócrona é realizada, como já mencionado, com um tempo de ciclo ajustável. Na fase assíncrona da troca, a pilha do protocolo IP é usada, o controlador solicita dados não críticos a todos os nós que enviam uma resposta à medida que obtêm acesso à transmissão para a rede. A relação de tempo entre as fases isócrona e assíncrona pode ser ajustada manualmente.
Protocolo Ethernet / IP da Rockwell Automation
O EtherNet / IP foi desenvolvido com a participação ativa da Rockwell Automation em 2000. Ele usa a pilha IP TCP e UDP e a estende para uso em automação industrial. A segunda parte do nome, contrariamente à crença popular, não significa o Protocolo da Internet, mas o Protocolo Industrial. O IP UDP usa a pilha de comunicação CIP (Common Interface Protocol), que também é usada em redes ControlNet / DeviceNet e é implementada em TCP / IP.
A especificação EtherNet / IP é pública e gratuita. A topologia de rede Ethernet / IP pode ser arbitrária e incluir um anel, estrela, árvore ou barramento.
Além das funções padrão dos protocolos HTTP, FTP, SMTP, EtherNet / IP, ele implementa a transferência de dados críticos de tempo entre o controlador de polling e os dispositivos de entrada / saída. A transmissão de dados críticos em termos de tempo é fornecida por pacotes TCP e a entrega crítica em termos de tempo de dados de controle cíclico é via UDP.
Para sincronização de tempo em sistemas distribuídos, o EtherNet / IP usa o protocolo CIPsync, que é uma extensão do protocolo de comunicação CIP.
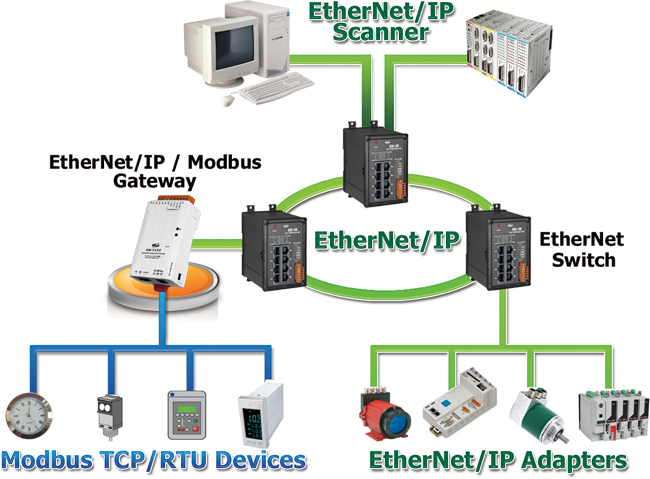 Ilustração esquemática de uma rede Ethernet / IP com vários nós e dispositivos Modbus. Fonte: www.icpdas.com.tw
Ilustração esquemática de uma rede Ethernet / IP com vários nós e dispositivos Modbus. Fonte: www.icpdas.com.twPara simplificar a configuração da rede EtherNet / IP, a maioria dos dispositivos de automação padrão vem com arquivos de configuração predefinidos.
Implementação do protocolo Fastwel FBUS
Eles pensaram por um longo tempo se deveriam incluir a empresa russa Fastwel na implementação doméstica do protocolo industrial FBUS nesta lista, mas decidiram escrever alguns parágrafos para entender melhor a realidade da substituição de importações.
Existem duas implementações físicas do FBUS. Um deles é um barramento no qual o protocolo FBUS é executado sobre o padrão RS485. Além disso, há uma implementação do FBUS em uma rede Ethernet industrial.
É difícil chamar o FBUS de protocolo de alta velocidade, o tempo de resposta depende muito do número de módulos de entrada-saída no barramento e dos parâmetros de troca, geralmente varia entre 0,5 e 10 milissegundos. Um escravo FBUS pode conter apenas 64 módulos de E / S. Para um barramento de campo, o comprimento do cabo não pode exceder 1 metro; portanto, não estamos falando de sistemas distribuídos. Pelo contrário, continua, mas apenas ao usar uma rede industrial FBUS sobre TCP / IP, o que significa um aumento no tempo de pesquisa várias vezes. Os extensores de barramento podem ser usados para conectar os módulos, o que torna possível colocar convenientemente os módulos no gabinete de automação.
 Controlador Fastwel com módulos de E / S conectados. Fonte: Control Engineering Russia
Controlador Fastwel com módulos de E / S conectados. Fonte: Control Engineering Russia
Total: como tudo isso é usado na prática no ACS TP
Naturalmente, a diversidade de espécies dos modernos protocolos industriais de transferência de dados é muito maior do que a descrita neste artigo. Alguns estão vinculados a um fabricante específico, outros, pelo contrário, são universais. Ao desenvolver sistemas de controle de processo automatizado (APCS), o engenheiro seleciona os protocolos ideais, levando em consideração tarefas e limitações específicas (técnica e orçamento).
Se falamos sobre a prevalência de um protocolo de troca específico, podemos dar um diagrama da HMS Networks AB , que ilustra as quotas de mercado de várias tecnologias de troca em redes industriais.
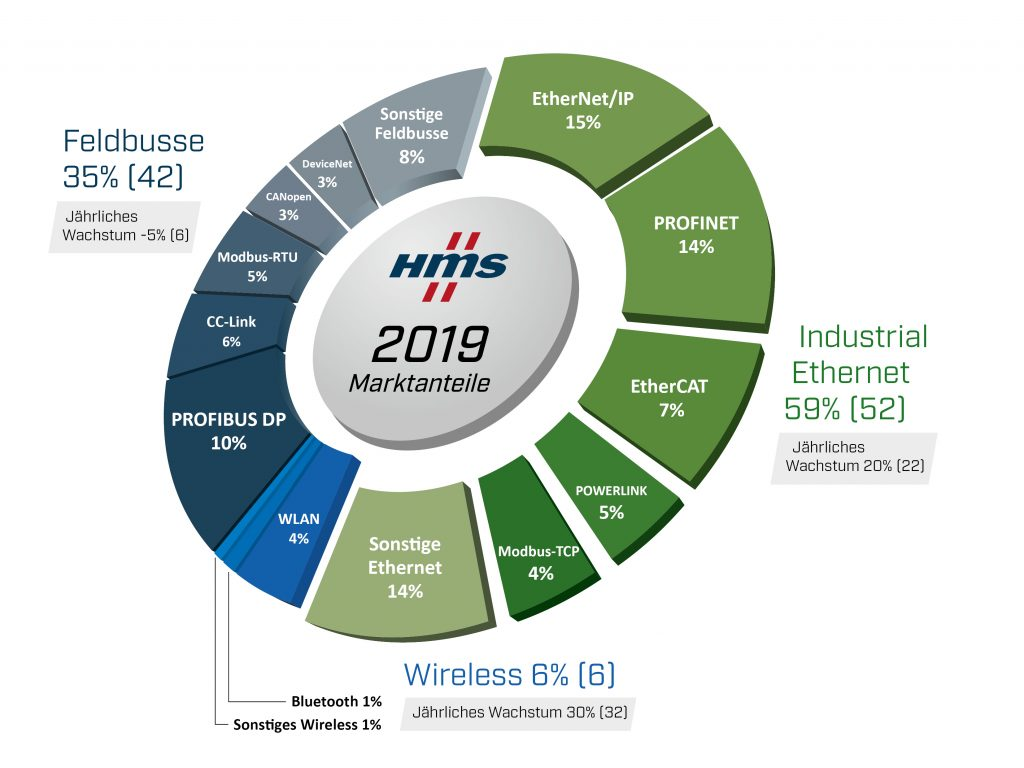 Fonte: HMS Networks AB
Fonte: HMS Networks ABComo você pode ver no diagrama, PRONET e PROFIBUS da Siemens ocupam uma posição de liderança.
Curiosamente, há 6 anos,
os protocolos PROFINET e Ethernet / IP ocupavam 60% do mercado .
A tabela abaixo resume os protocolos de troca descritos. Alguns parâmetros, por exemplo, desempenho são expressos em termos abstratos: alto / baixo. Equivalentes numéricos podem ser encontrados em artigos de análise de desempenho.
As aplicações dos protocolos de comunicação descritos, barramentos de campo e redes industriais são muito diversas. Começando pelas indústrias química e automotiva e terminando com tecnologias aeroespaciais e eletrônica. Protocolos de comunicação de alta velocidade são requisitados em sistemas de posicionamento em tempo real para vários dispositivos e em robótica.
Com quais protocolos você trabalhou e onde o usou? Compartilhe suas experiências nos comentários. :)