No âmbito do fórum Skolkovo Robotics & AI, em 16 de abril de 2019, Moscou sediou a primeira reunião na Rússia sobre o Robot Operating System, a estrutura mundial de software que implementa os algoritmos básicos para a construção de robôs complexos. O evento deu um impulso tão poderoso ao desenvolvimento de todas as equipes. Mergulhamos no que mais amamos - o desenvolvimento! Portanto, somente agora encontramos tempo para consolidar os materiais exclusivos de nossa reunião, transmitidos pelos palestrantes para publicação.
Entre os visitantes do maior fórum de robótica da Rússia, havia mais de 150 engenheiros que já usam o ROS ou apenas planejam usá-lo em seus projetos. Este é um bom resultado para a primeira reunião de uma pequena comunidade de desenvolvedores de ROS russos. Nós nos esforçamos para fazer parte do movimento global - e centenas de participantes já estão reunindo eventos semelhantes no exterior.
O segundo Meetup do Russian ROS será realizado em 30 de novembro de 2019 .
Obrigado novamente a todos que vieram e passaram seu tempo em um estudo detalhado de relatórios e perguntas complicadas. Tudo isso mostrou que há um grande interesse por parte da comunidade no desenvolvimento de ERO e é necessário continuar o trabalho regular para realizar essas reuniões. Crescemos quando compartilhamos as melhores práticas e melhoramos uma das ferramentas de desenvolvimento de robôs mais comuns no mundo - o Sistema Operacional do Robô.
Nossos palestrantes eram praticantes desenvolvedores com tópicos de sua experiência real. Portanto, os materiais apresentados nesta publicação refletem as possibilidades de uso do ROS em projetos existentes e em andamento.
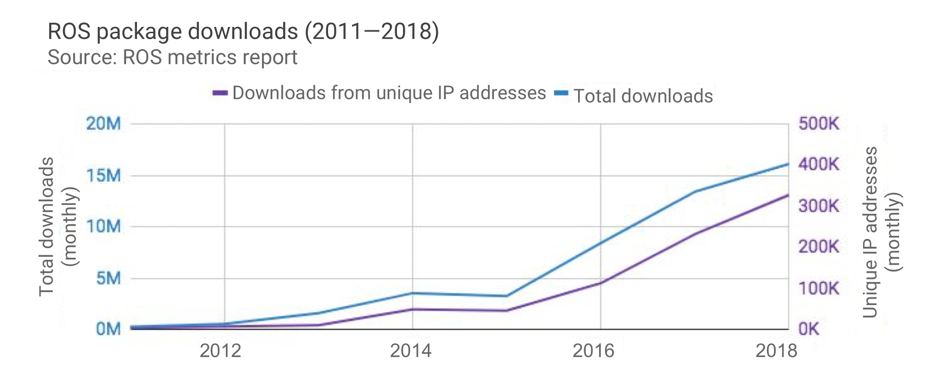
A comunidade ROS global é atualmente a maior e mais aberta comunidade robótica do mundo. O número de downloads de ROS aumentou quase 6 vezes desde 2014! Obviamente, essa é a ferramenta mais importante para quem cria robôs; portanto, no Laboratório de Robótica Sberbank, apoiamos todos que compartilham valores de ROS conosco e desejam trocar experiências.
Se você estiver desenvolvendo novos algoritmos para robôs, escrever um pacote para o ROS é uma boa solução para integrá-los aos robôs existentes e demonstrar ao mundo.
Se você está apenas começando sua jornada em robótica, aprender o ROS ajudará você a dominar tecnologias modernas e a integrar-se à comunidade.
O primeiro Meetup de ROS estava cheio de relatórios interessantes. Mas como nem todos puderam participar do evento em Moscou, publicamos vídeos e slides de apresentação para você:
Introdução ao ROS. Ideologia e status atual.Alexey Burkov, Laboratório de Robótica Sberbank.O relatório fala sobre a aparência do ROS, seus conceitos e as pessoas que o desenvolveram, bem como o estado atual da estrutura na comunidade global.
Link para slides da apresentação.
Experiência de uso de ROS em robótica competitiva usando o exemplo da Eurobot.Alexey Postnikov, Laboratório de Robótica Sberbank.O relatório discute o sistema de localização de robôs usando marcadores Aruco usando ROS.
Link para slides da apresentação.
A propósito, você pode participar de competições Eurobot ingressando na equipe SetUp, apoiada pelo Laboratório de Robótica Sberbank - essa é uma ótima maneira de aprender robótica e ROS e colocar suas habilidades em prática. Para participar, escreva uma carta para robotics@sberbank.ru.Navegação SLAM e laser lidar.Alexey Burkov, Laboratório de Robótica Sberbank.A história de como usamos o ROS para navegar em um robô de correio usando o SLAM e um planejador de caminho abordou os seguintes tópicos:
- Construindo um mapa de sala e localização de robô usando o algoritmo Gmapping.
- Localização do robô no mapa pelo algoritmo AMCL.
- Navegação por robô através do MoveBase e DWA.
Link para slides da apresentação.
Você pode obter um estágio no Laboratório de Robótica Sberbank sobre os tópicos de courier e ROS; para isso, escreva uma carta para robotics@sberbank.ru.Um planejador de trajetos robóticos, levando em consideração um determinado mapa e obstáculos dinâmicos, usando o exemplo do Eurobot.Alexander Gamayunov, Laboratório de Robótica Sberbank.O histórico de criação de seu próprio planejador de rotas com base nos algoritmos A *, T *, Costmap Server, Global Planner, STM32 Driver e Ramer-Douglas-Pecker para participar de competições internacionais da Eurobot.
Link para slides da apresentação.
Experiência do uso do ROS no sistema de controle de um veículo subaquático autônomo desabitado “Cousteau 2”Timur Akhtyamov, UCM Hidronáutica.Simulação de veículo subaquático. Uso de máquinas de estado SMACH. Série do wrapper ROS. O gatilho para códigos QR. API Roslaunch para iniciar e parar arquivos de inicialização a partir do código Python. Nós de inicialização automática na inicialização do SO.
Link para slides da apresentação.
BelAZ na ROS como nós no VIST Group criamos soluções de mineração.Elizaveta Shpiev, Grupo VIST.A história de como o Grupo VIST usa o ROS para criar uma carreira inteligente.
Link para slides da apresentação.
Testar código no ROS é como construir um carro não tripulado e não quebrar nada.Oleg Shipitko, Visillect.História do uso do Google Test (C ++), Unittest (Python) e Rostest para testes em ROS.
Link para slides da apresentação.
A visão computacional em robôs é a captura de coisas por um manipulador de acordo com os dados de uma câmera RGBD.Alexander Syomochkin, Laboratório de Robótica Sberbank.Sobre como usar a câmera RGBD para capturar objetos com um robô com um manipulador.
Link para slides da apresentação.
A unificação do desenvolvimento unificado de ROS do mundo.Konstantin Konogorsky, Grupo VIST.A continuação da história da carreira intelectual do Grupo VIST, ou como combinar o inextricável.
Link para slides da apresentação.
ROS Docker Inicia uma imagem ROS virtual em um computador Linux.Alexander Syomochkin, Laboratório de Robótica Sberbank.Relate sobre o uso do Docker para criar e executar uma imagem ROS virtual no Linux.
Link para slides da apresentação.
Quais dispositivos estão ouvindo e do que estão falando.Alexander Menshikov, Laboratório de Robótica Sberbank.Usando o ROS para criar serviços de comunicação de voz.
Link para slides da apresentação.
A reunião anterior do ROS deu aos participantes muitas emoções positivas e relatórios interessantes sobre o uso do ROS na robótica moderna na Rússia, e esperamos desenvolver ainda mais a comunidade russa do ROS com sua ajuda. Portanto, convidamos todos a fazer uma apresentação no próximo encontro do ROS em 30 de novembro de 2019 em Moscou.
forms.gle/G3ggYcvFLfuJw1ur6Além do ROS Meetup, também realizamos estágios do ROS no Sberbank Robotics Laboratory para nossos projetos, mais detalhes podem ser encontrados
aqui .
Se você quiser saber mais sobre o nosso trabalho ou as instruções de desenvolvimento da robótica moderna, recomendamos que leia com atenção a
revisão analítica anual
do mercado global de robótica .
Parece-nos que a primeira experiência de reunir a comunidade foi correta e positiva - continuaremos com isso. E o
próximo encontro do ROS está agendado para 30 de novembro de 2019 !
Você pode participar como ouvinte preenchendo uma
inscrição e aguardando a confirmação de sua participação no correio.
