Saudações, queridos!
“Corte de hidrofone hidroacústico” ©
Nos artigos anteriores, a situação não mudou fundamentalmente: ainda não exploramos a maior parte da
lagoa oceânica do mundo, o que significa que precisamos aumentar a pressão.
Então, eu fortaleço como posso.
Hoje vou falar em detalhes e "nos dedos" sobre os diferentes tipos de sistemas de navegação subaquática de acordo com a classificação incorreta estabelecida, quais são, quais são os prós e os contras, em geral, caso em que para onde correr, o que pressionar e para onde virar.
Achtung: vestígios de matan podem estar presentes no artigo!
Se as águas calmas da sua alma despertaram esse sinal, bem-vindo ao kat!
Quando se trata de
[1] sistemas de posicionamento acústico, seu tipo é sempre indicado como USBL, LBL, SBL. "BL" aqui significa Linha de base, ou seja, linha de base. Aqui proponho e começo.
Qual é a linha de base?
A linha de base é formada por dois pontos de referência, cuja posição relativa é conhecida em um determinado momento. A primeira imagem mostra como esses pontos de referência, juntamente com o desejado, determinam o conjunto de triângulos espaciais (
B1B2A∗ ), cuja base é a linha de base (
B1B2 )
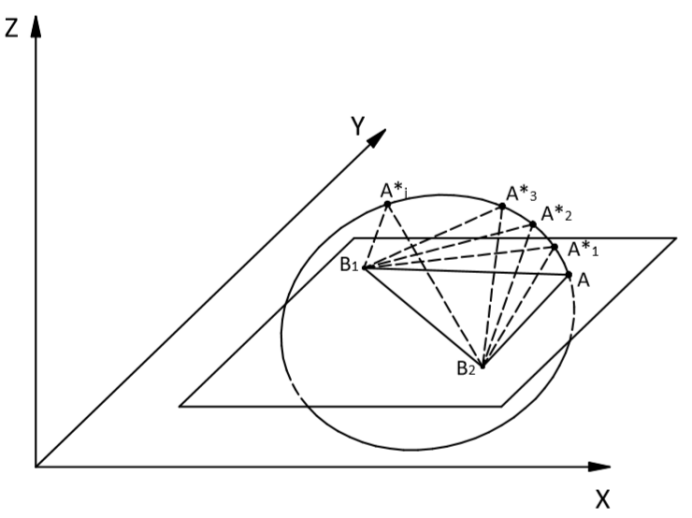 A linha de base define o ponto desejado no círculo.
A linha de base define o ponto desejado no círculo.O triângulo é definido por:
- ou na base e em duas faixas, medidas a partir de ambos os pontos de referência até a desejada, neste caso, estamos falando de trilateração;
- ou na base e nos dois cantos, chamados triangulação.
Digressão líricaEnquanto escrevia um artigo, eu estava pensando sobre como eu entrei nele.
Lembrei-me de que quando criança assisti a um filme em que, no mundo pós-apocalíptico, as pessoas caçavam dragões (o que causou o apocalipse), para o qual calcularam sua localização no ar, colocaram "faróis" no chão e aprendi claramente desde então. que, para uma imagem completa dos faróis, eram necessários três. A palavra "triangulação" está firmemente enraizada no cérebro adolescente. Lembro-me do que pensei na época: como seria legal ser um desenvolvedor de tais coisas.
Na verdade, bem, aqui estou eu!
A definição de um triângulo significa a determinação das coordenadas do ponto desejado.
O uso de triângulos na determinação da localização se origina das profundezas dos séculos e as primeiras referências já estão nas obras de
Thales [2] e
Euclides [3] .
Uma linha de base fornece muitos triângulos cujos vértices estão em um círculo. E para determinar a localização do ponto desejado no espaço n-dimensional, são necessárias n + 1 linhas de base. O número de linhas de base necessárias pode ser reduzido para n se uma das coordenadas do ponto desejado for conhecida, por exemplo, a profundidade (ou a altura
de vôo do dragão ), que geralmente é conhecida por medição direta.
A definição acima da linha de base é geralmente referida aos métodos de triangulação e trilateração, mas pode ser estendida ao método de multilateração [4].
Nesse caso, os ângulos e os intervalos até o ponto desejado são desconhecidos, mas a diferença entre este último é desconhecida (por exemplo, o momento de emissão do sinal pelo objeto desejado é desconhecido, mas os momentos de sua chegada nos dois pontos de referência são conhecidos e medidos por relógios sincronizados, ou seja, o atraso entre a chegada do sinal no pontos de referência).
O tempo de chegada do sinal multiplicado pela velocidade de propagação do sinal é comumente chamado de pseudo-faixa.
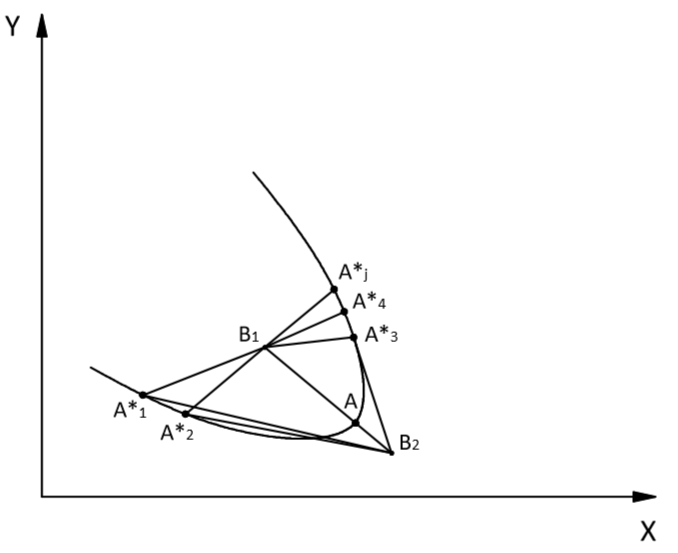 A linha de base para multilateração determina o ponto desejado na hipérbole
A linha de base para multilateração determina o ponto desejado na hipérboleNa figura acima, é fácil ver que dessa maneira um número infinito de triângulos pode ser definido (
B1B2A∗ ) cujos vértices representando a posição do ponto desejado estão na hipérbole. Nesse caso, os pontos de ancoragem serão os focos da hipérbole.
Aqui, como no caso da triangulação, a posição do ponto desejado é completamente determinada por n + 1 linhas de base para o espaço n-dimensional.
Palavra ruim para controles de exportação
O fato é que, dependendo da localização das coordenadas, existem duas classes de sistemas:
- na verdade, navegação (diretamente chamada de sistemas de navegação), onde as coordenadas são geradas no próprio objeto (como no GPS).
- sistemas de rastreamento (vigilância), quando, por exemplo, há algum tipo de farol no objeto e nós o estamos carregando.
Portanto, para controle de exportação, essa palavra é muito ruim e não é adequada, o que foi tragicamente verificado por nossa própria experiência. Explicar à máquina burocrática que isso "não é exatamente o que você pensou" é muito difícil e, desde então, chamamos esses sistemas de sistemas de posicionamento.
Moda nerd eleEm vista das ambiguidades da tradução, vale ressaltar que o sistema de posicionamento não deve ser confundido, por exemplo, com os chamados posicionamento dinâmico em navios, sistemas de posicionamento dinâmico (Eng. DP, posicionamento dinâmico), geralmente é de uma área adjacente, mas significa um pouco diferente - sistemas que permitem que um navio mantenha sua posição e orientação geográfica (rumo), "pairando" em um só lugar.
Classificação geralmente aceita de acordo com o tamanho relativo da linha de base e sua incompletude
Agora, de volta às primeiras letras das abreviações USBL, LBL e SBL. Eles determinam o tamanho relativo das linhas de base.
Em geral, é determinado em relação ao tamanho máximo da trajetória possível de um objeto posicionado.
Se for bem simples de explicar, por exemplo,
forçamos o mergulhador convencido a pendurar o farol do réu em si e querer monitorar seus movimentos. “Tamanho máximo da trajetória possível de um objeto posicionado” é o diâmetro do círculo no qual caberá toda a trajetória de seu movimento.
Moda nerd elePara toda a gravidade, deve-se mencionar que a trajetória do mergulhador se refere ao sistema de coordenadas associado à base de medição. I.e. se seguirmos o mergulhador do barco de borracha da embarcação de apoio e deriva junto com ele, então, em princípio, podemos flutuar alguns quilômetros (na realidade, é claro, isso não pode ser com mergulhadores, mas com um robô de controle remoto - completamente). E é precisamente a trajetória que é estimada em relação ao nosso navio.
É claro que o atributo de classificação é mais ou menos, e eu concordo completamente. No entanto, a classificação geralmente aceita é estruturada dessa maneira. E eles distinguem:
- USBL, linha de base ultra-curta - sistemas de base ultra-curta, em que as dimensões das linhas de base são muito menores que a trajetória do objeto posicionado e
- SBL, linha de base curta - sistemas de base curta, em que as dimensões das linhas de base são comparáveis à trajetória de um objeto posicionado,
- LBL, linha de base longa - sistemas de linha de base longa em que as dimensões das linhas de base excedem significativamente as dimensões da trajetória do objeto posicionado.
Existe uma certa ambiguidade na escolha de classe entre sistemas de base curta e longa e, frequentemente, como um dos sinais de sistemas de base curta, eles indicam uma conexão rígida de elementos de apoio entre si - por exemplo, quando são fixados em um navio. Os elementos de suporte do sistema de base longa não são conectados de forma cinemática, isto é, as mudanças em suas posições no espaço não são correlacionadas.
Agora, consideramos todos os três tipos e algumas de suas combinações com mais detalhes em termos de pontos fortes e fracos.
Sistemas de base ultracurta
Como o nome indica, a linha de base nos sistemas de base ultracurta (sistemas UKB) é muito menor que a trajetória do objeto posicionado.
Como regra geral, na maioria dos sistemas UHF existentes (por exemplo,
este [5] ,
este [6] e
este [7] ), o tamanho das linhas de base é de unidades a dezenas de centímetros. A maioria deles são sistemas goniométricos - ou seja, sistemas que determinam o ângulo de chegada do sinal do sinalizador de resposta ou indicador.
Em termos de layout, esses sistemas consistem em:
- uma estação base - um dispositivo que contém uma antena receptora de múltiplos elementos, cujos elementos individuais formam um conjunto de antenas em fases; nesse caso, o ângulo de chegada é determinado a partir da diferença de fase do sinal recebido entre os elementos individuais, ou um conjunto de linhas de base, também formadas por pares de elementos individuais, em neste caso, o ângulo de chegada é determinado por diferentes atrasos na chegada do sinal aos elementos;
Para não mexer com os direitos autorais das imagens, darei a nossa Zima-Base como um exemplo de estação base:
Em cima da mesa:

No momento de trabalho:

- respondedores de sinalizadores que respondem a uma solicitação da estação base, o que permite determinar o tempo de propagação do sinal entre o sinalizador e a estação base (faixa inclinada) ou pingers, diferentemente dos sinalizadores de resposta, emitindo um sinal em intervalos regulares. O Pinger pode ser pré-sincronizado com a estação base, o que permite a medição unidirecional do tempo de propagação.
Como exemplo, novamente darei o respondedor de sinal do nosso sistema Zima:
Autônomo com caixa de bateria:

TNLA a bordo:

Existem também sistemas em que os transponders são acoplados eletricamente a uma estação base e o sinal de interrogação é fornecido como um pulso de portão elétrico.
Assim, a classe de sistemas UKB é representada por uma gama bastante ampla de várias execuções específicas, e geralmente classificar um sistema como UKB não fornece informações suficientes sobre o método específico de sua operação.
A figura a seguir ilustra o princípio generalizado de operação dos sistemas UKB.
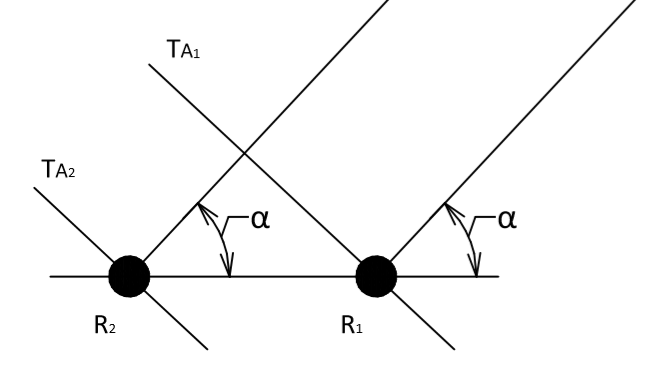 Demonstração do princípio de operação de sistemas que determinam o ângulo de chegada de um sinal
Demonstração do princípio de operação de sistemas que determinam o ângulo de chegada de um sinalA figura acima mostra um par de transdutores de matriz de antena que recebem uma frente plana de sinal. De uma distância conhecida
R1R2 entre transdutores e atraso medido
TA1TA2 determinado pelo ângulo
alpha chegada de sinal.
As vantagens óbvias dos sistemas UKB incluem a pequena composição necessária de equipamentos e a rápida implantação do sistema.
No caso geral, o respondedor ou indicador pode ser
enrolado com fita simplesmente fixada em um objeto posicionado, o que aumenta a universalidade do sistema como um todo.
Em alguns casos práticos, o uso dos sistemas UKB é incontestado. Por exemplo, quando é feita uma pesquisa por algo
acidentalmente submerso que afundou e não é possível estabelecer uma base longa com antecedência, devido à vastidão da área de pesquisa, ou quando a profundidade do local não permite estabelecer uma base longa flutuante, e a instalação da base inferior não se justifica em termos de prazo e / ou clima condições.
No entanto, os sistemas UKB têm algumas desvantagens graves. Por exemplo, para determinar a posição de um objeto posicionado em coordenadas absolutas, a própria estação base deve ser totalmente definida no espaço: é necessário conhecer não apenas sua posição geográfica, mas também a orientação da matriz de receptores no espaço: ângulo azimutal, ângulo de rotação e ajuste.
Ou seja, do ponto de vista estrutural, o sistema UHF deve incluir não apenas um conjunto de antenas de vários elementos, que por si só é bastante complexo estruturalmente, mas também dispositivos que podem determinar sua posição no espaço - sensores de inclinação ao longo de dois eixos horizontais e um sensor título - bússola magnética ou GNSS. Se a antena de localização de direção estiver instalada em algo embaixo d'água, então, a possibilidade de usar a bússola GNSS será fechada.
Além disso, desde a posição do objeto desejado é estimada por dois ângulos de chegada do sinal (horizontal e vertical) ou pelo ângulo e profundidade horizontais (modernos e progressivos) transmitidos no sinal do respondedor ou indicador, é óbvio que a precisão angular final
delta alpha sistemas proporcionará aumento com uma variedade de
Dtg delta alpha o erro da posição determinada do objeto posicionado, crescendo a uma distância proporcional à tangente do erro angular, ilustrado na figura a seguir:
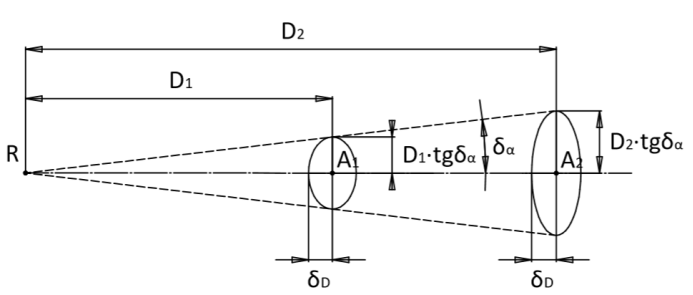 Influência da precisão angular dos sistemas UKB no erro na determinação da posição de um objeto posicionado
Influência da precisão angular dos sistemas UKB no erro na determinação da posição de um objeto posicionadoA figura acima mostra a propagação da localização determinada da fonte de sinal. Um dos semi-eixos da elipse
deltaD determinado pelo erro na medição da distância, e o outro, conforme
Dtg delta alpha onde D é a distância (faixa inclinada) da fonte.
Além disso, no caso de ambiguidade e impossibilidade de garantir a identificação de um feixe direto (feixe - leia a frente do sinal, chame diretamente o que veio diretamente da fonte, sem refletir nada), os sistemas UHF como um todo são fortemente influenciados pela propagação de caminhos múltiplos, especialmente se existem reflexões da costa ou de qualquer elemento da paisagem subaquática.
Em outras palavras, na presença de poderosos sinais refletidos vindos de outras direções (até o oposto), o sistema UHF não é imune a aceitar esse sinal como direto (uma vez que, em geral, esse problema é insolúvel - a soma dos sinais refletidos pode ser mais poderosa, "mais alta" do que direta e às vezes na prática), o que leva a resultados completamente incorretos na solução do problema de navegação.
Os sistemas mais recentes usam a medição direta da profundidade do transponder ou ponteiro, enquanto os sistemas mais antigos determinam a posição em dois ângulos. O fato é que o ângulo vertical tem a menor certeza, porque o som como um todo pode sofrer várias reflexões na superfície inferior e sua definição é relevante apenas nas menores distâncias. Isso é mostrado na figura abaixo, onde a seção vertical do canal é mostrada na imagem superior e pode ser visto que, ao determinar o ângulo vertical de um dos sinais refletidos, o erro pode ser completamente inaceitável. Ao mesmo tempo, na parte inferior da figura, onde é mostrada uma vista superior, é visto que todos os sinais refletidos vêm da mesma direção horizontal.
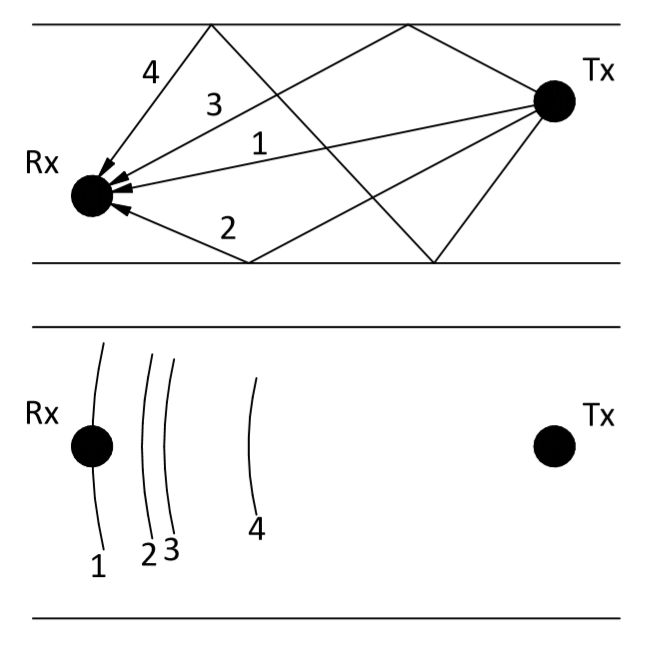 Precisão diferente na determinação de ângulos horizontais e verticais em sistemas UKB
Precisão diferente na determinação de ângulos horizontais e verticais em sistemas UKBResumindo a discussão dos sistemas UCB, podemos dizer que sua área de aplicação é onde é difícil, injustificado ou impossível usar outros tipos de sistemas de navegação e sistemas de posicionamento.
Fabricantes de sistemas modernos UKB relatam precisão angular de seus produtos até 0,03 ° (1σ)
[8] .
Sua vantagem: velocidade de implantação e versatilidade.
Com a experiência de me comunicar com os usuários, posso dizer que todo mundo ao redor quer apenas UKB apenas por causa da velocidade da implantação. E não importa o quanto eu explique, não importa o quanto eu escreva, todos concordam, mas eles ainda querem usar o UCB. Como diz o ditado: "não se esqueça de sofrer".
Alguns inexperientes geralmente usam a abreviação USBL como uma designação para qualquer sistema de posicionamento subaquático.
Moda nerd eleUma curiosidade ainda mais curiosa é quando qualquer coisa hidroacústica é chamada sonar. Somos caras alfabetizados e lembramos que um sonar é como um radar, apenas com som, ou seja, sonar, mas essa é uma história completamente diferente.
Sistemas de base curta
Sistemas de base curta na grande maioria dos casos estão localizados nos cascos de embarcações especializadas. Ou seja, as dimensões das linhas de base são comparáveis às dimensões do navio.
Atualmente, a precisão dos sistemas UHF é bastante alta, e a conveniência do uso parece muito mais lucrativa do que para o KB, o que levou a afastar os sistemas de KB do uso generalizado, e as tarefas resolvidas pelos sistemas de KB agora incluem apenas aqueles que têm condições específicas que não permitem aplicar o sistema UKB.
No entanto, no passado, as agências de design eram usadas, por exemplo, para escoltar o batiscafe Triest-1 até o local da morte do submarino Thresher da Marinha dos EUA. O sistema SHARPS SBL KB foi usado na Inspeção Oceanográfica do buraco de Woods para acompanhar o veículo de alto mar JSON ao seu suporte rebaixado MEDEA, é relatada a precisão de posicionamento alcançada de 0,09 m [9].
Nos sistemas modernos de KB
, isso [10] pode ser observado, que é posicionado pelo fabricante como "GPS subaquático" e é distribuído como designer.
Para que os olhos percebam e sintam todo o charme e a "simplicidade" da implantação, darei algumas fotos de nossos testes recentes do departamento de design de protótipos para estacionar um veículo subaquático autônomo:

A estrutura de alumínio é a base curta. Você pode imaginar a conveniência de lançar este design.

Para ser justo, vale dizer que, em toda a ideologia do trabalho, ele deve ser reduzido apenas uma vez. Também tivemos que aumentá-lo durante os testes - o perfil custa dinheiro e os hidrofones não ficam na estrada.
Resumindo a revisão dos sistemas KB, observamos que:
As vantagens dos sistemas KB incluem:
- velocidade de implantação e mobilidade (os sistemas geralmente são montados em um navio);
- em média, maior precisão em comparação com os sistemas UKB (embora, no entanto, tenha em mente que alguns UKBs de alta classe, por exemplo [8] , geralmente mostram maior precisão de posicionamento do que alguns KBs mais simples, como o já mencionado GPS Waterlinked [10] ) .
Por contras, o KB pode incluir as mesmas desvantagens inerentes aos sistemas UHF, a saber:
- a necessidade de determinar a orientação da base de medição (linhas de base) - nos cantos do percurso, rolar e aparar, além de estar vinculado à posição geográfica absoluta;
- correlação de erros na determinação dos tempos de chegada dos elementos de base, em vista de sua conexão cinemática, por exemplo, devido à inclinação
- e, como uma agência de design geralmente pode funcionar como um sistema goniométrico, também está sujeita ao problema de diminuir a precisão ao mover um objeto posicionado da base.
- ( «») .
. —
, , . , . , ,
[11] [12] , , , , GNSS,
[13] [14] , GNSS
GPS[15] , GLONASS[16],
Galileo[17] , Beidou[18] — DECA[19],
[20] LORAN[21].
, , , — , .
, — ( ), , , , , .
— , — - , , -, .. ( 500 ), , -, .
, , , , .
.
. , ( 15 ), , , .
, : , , , , , , — ( . , ).
, — , , , .
, RedWAVE, ( ):

:

.. [22][23]
[24] (, . VLBL — virtual long baseline) .
, , : , .
: -, , — , - . . (, ) . , .
Como exemplo, darei ao nosso projeto de demonstração (até dois!) De uma base longa virtual em dois modems uWAVE.O primeiro rascunho é descrito em um de nossos artigos anteriores . Lá, o modem, o módulo GNSS e o módulo de rádio foram combinados usando uma placa no STM32.Na nova reencarnação deste projeto, o código foi reescrito para o Arduino UNO e a solução para o problema de navegação é realizada em um aplicativo de código aberto .Sistemas combinados
. , ,
[1] , , . , .
, , , , .
, .
, .
.. , . , .
. () . . . (. Dead-reckoning) . I.e. .
- . , (
! ), — (
!!! ). , , , « ».
, :
- , - . , , , . [1] 0.5-0.2% .
- , ( ) , ; , -, , [1] , 0.5% ;
- , ( ), . , — , , [1] — 0.1% . , Vickery , — 2-3 ( 15 ), 1 (19-36 ) 5 , 50 110 .
PS
Muito obrigado por sua atenção, teremos o maior prazer em ouvir críticas construtivas e responder a perguntas.
Se este artigo causará interesse entre os leitores, no próximo pretendo falar sobre a classificação correta dos sistemas de navegação subaquática.
Se tudo correr bem, em outro artigo analisarei vários algoritmos para a operação de sistemas de navegação com exemplos de código.
Lista de fontes- Vickery, K. (sd). Sistemas de posicionamento acústico. Uma visão geral prática dos sistemas atuais. Anais do Workshop de 1998 sobre Veículos Subaquáticos Autônomos (Cat. No.98CH36290).
- Diógenes Laércio. As Vidas e Opiniões de Filósofos Eminentes de Diogenes Laertius (Tradução de Yonge, CD). Londres: George Bell e filhos, 1905. Google books. Web 01 abr. 2019.
- Frankland, William B., O primeiro livro dos elementos de Euclides: com um comentário baseado principalmente no de Proclus Diadochus. Cambridge: na University Press, 1905 .
- Limitações de precisão dos sistemas hiperbólicos de multilateração, Harry B. Lee, Instituto de Tecnologia de Massachusetts, Lincoln Laboratory, Nota técnica 1973-11, 22 de março de 1973
- evologics.de/usbl
- www.tritech.co.uk/media/products/usbl-tracking-system-micronnav.pdf
- www.ixblue.com/products/posidonia
- www.ixblue.com/sites/default/files/2018-02/Gaps.pdf
- Integrando o posicionamento relativo de precisão nas operações de JASON / MEDEA ROV, Bingham et al., MTS Journal Spring 2006 (Volume 40, Número 1)
- waterlinked.imtqy.com/docs/explorer-kit/introduction
- www.ixblue.com/sites/default/files/2019-01/Ramses%20-%20Datasheet.pdf
- evologics.de/web/content/16763?unique=cc5bc295cb0a4bf681a31de24fdb204f62169c2b&download=true
- github.com/ucnl/Docs/blob/master/RU/RedWAVE/RedWAVE_LBL_Deployment_maintenance_RedNAV_ru.pdf
- www.alseamar-alcen.com/sites/alseamar-alcen.com/files/pdf/products/fiche_205x292_gib-sar.pdf
- www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf
- "O sistema de navegação global GLONASS: desenvolvimento e uso no século XXI." 34ª Reunião Anual de Tempo e Tempo Preciso (PTTI). 2002.
- download.esa.int/docs/Galileo_IOV_Launch/Galileo_factsheet_2012.pdf (PDF). ESA 15 de fevereiro de 2013. Recuperado em 8 de dezembro de 2019.
- "Direções 2017: o caminho da BeiDou para o serviço global". Mundo GPS. 6 de dezembro de 2016.
- Derek Howse, radar no mar. Macmillan Press, Grã-Bretanha 1993. ISBN 1-55750-704-X
- GOST R 54025-2010 Sistema de radionavegação "The Seagull". Dispositivos receptores. Requisitos para especificações técnicas. Métodos de teste e resultados de teste necessários
- O desenvolvimento da navegação e do tempo Loran-C, Gifford Hefley, Bureau Nacional de Padrões dos EUA, outubro 1972.
- MB Larsen, “Navegação sintética de linha de base longa de veículos subaquáticos”, apresentado na Conferência e Exposição Oceans 2000 MTS / IEEE, 2000.
- João Saúde, Antonio Pedro Aguiar, navegação acústica de farol único para um AUV na presença de correntes oceânicas desconhecidas, IFAC Proceedings Volumes, vol. 42, edição 18, 2009, pp. 298-303, ISSN 1474-6670, ISBN 9783902661517, doi.org/10.3182/20090916-3-BR-3001.0057 .
- Alexander Dikarev, Stanislav Dmitriev, Vitaliy Kubkin e Andrey Vasilenko. Estimativa de posição de sensores subaquáticos autônomos usando o método virtual de linha de base longa, International Journal of Wireless & Mobile Networks (IJWMN), vol. 11, edição 2, abril de 2019