Saudações, queridos!
"Se, em resposta à solicitação de um amigo ou inimigo, estiver incorreto responder, a segunda solicitação já estará na 533ª frequência " (C)
“Tudo isso passa de alguma forma por você. Ou através de você. E para mim é como um rolo compressor. Nem um único osso foi deixado. "(C) A. e B. Strugatsky," Cidade Condenada "
Você já se perguntou como ficaria embaixo d'água, digamos, boxe ou andando?
Antes de realmente termos tempo para aproveitar todos os encantos da Internet,
já se tornou uma palavra de parada quando consideramos pedidos de subsídios científicos, pois publicações científicas e não muito começaram a aparecer sobre como suportar ataques cibernéticos em sistemas de posicionamento de sonar e (oh, deuses! ) à rede submarina de sensores autônomos!
Apenas alguns parágrafos de suspense técnico e prometo explicar tudo.

Você está bem, está sentado do outro lado do monitor e lendo outra análise. E ainda sinto vergonha quando respondo à pergunta do que faço. Você sabe, muitos nem suspeitaram que transmitir dados debaixo d'água seja algum tipo de problema. Ou diga que o GPS não funciona debaixo d'água.
O que está acontecendo?
Vamos declarar imediatamente as condições. Ter algo em que confiar. Agora, fornecerei alguns truques para estimar "a olho".
Uma
banda de frequência muito
estreita está disponível para a comunicação do sonar, aproximadamente - de unidades a dezenas de quilohertz. O som em diferentes frequências diminui de forma desigual.
Se pegarmos o mar "médio", o coeficiente de atenuação:
- para som com uma frequência de 1 kHz é de cerca de 0,1 dB / km
- para som com uma frequência de 10 kHz - 1 dB / km
- e para som com uma frequência de 100 kHz - sem dó 10 dB / km.
O que isso significa? Isso significa que, se você trabalha com um sinal de banda larga,
diferentes partes do espectro se propagam de maneira muito diferente .
Eu concordo, esses decibéis também sempre me confundem e "repreendem a raiz da hertz".
Se tudo for muito simplificado, o alcance médio da comunicação:
- em frequências na região de 1 kHz, pode atingir dezenas de quilômetros (com uma certa porcentagem de sorte - centenas)
- em frequências da ordem de 10 kHz - 10 quilômetros
- e em frequências na região de centenas de quilómetros - centenas de metros, e Deus proíba se pelo menos ninguém conseguir.
Uma fórmula bastante aproximada para estimar a frequência do sinal para atingir a faixa necessária é a seguinte:
$$ display $$ kHz = 40 / km ^ {2/3} $$ display $$
Ou, se você precisar descobrir qual faixa teoricamente um sinal de uma determinada frequência fornecerá:
$$ display $$ km = (40 / kHz) ^ {3/2} $$ display $$
No intervalo de 1 a 100 kHz, a fórmula é mais ou menos verdadeira.
Em frequências da ordem de 20 kHz, pode-se esperar um alcance de comunicação de 2 a 3 km e em frequências na região de 100 kHz a 300 metros. Essas coisas.
Ruídos, provenientes de grandes peças de metal, geralmente são de baixa frequência e se espalham para grandes distâncias.
Se queremos transmitir dados digitais, pelas considerações humanísticas mais gerais, com bastante otimismo, podemos esperar modestamente uma velocidade de transmissão de 5 kbps por banda de 10 kHz, desde que a largura de banda do sinal esteja acima de 10 kilohertz.
A velocidade do som é uma média de 1.500 m / s. Isso significa que para cada quilômetro e meio de alcance, o atraso associado à velocidade de propagação do sinal aumentará em 1 segundo.
Vamos entender essas quantidades. Se transferirmos condicionalmente algum tipo de solicitação por, digamos,
10 quilômetros , poderemos aceitar a resposta antes de
14 segundos . Em um dos experimentos, era esperado um sinal de resposta por mais de dois minutos e meio, porque o assinante estava a uma distância de 120 quilômetros.
Agora, nem sequer toco nos problemas associados ao fato de a velocidade do som ser altamente dependente da densidade da água. Camadas de água de diferentes densidades não se misturam nos mares e o som pode ser completamente refletido a partir do limite de duas camadas, ou seja, em algum lugar, o sinal simplesmente não irá para onde for necessário. Sem obstáculos visíveis.
Ruído, Multipath e Doppler. Todos os mares, oceanos e rios são barulhentos. Especialmente forte em frequências abaixo de 10 kHz. O som é refletido de baixo, os detalhes da paisagem subaquática, da superfície, dos reflexos se somam no ponto de recebimento, a trajetória das ondas se curva como resultado da refração. Os modems hidroacústicos podem manter-se em contato por quilômetros, mas não se ouvem através de uma densa camada de grama do mar, a um metro de distância um do outro.
É bom se tentarmos trabalhar no fundo do mar. Por exemplo, a profundidade é um quilômetro, a distância é 10, em proporções que parecem um banho. Abaixo, na imagem da Wikipedia, o traçado de raios é visível:

Mas e um corpo de água raso? No verão anterior, os colegas trabalhavam a uma distância de 800 metros, com uma profundidade de 4 metros. Geometricamente - esta é uma poça na calçada. Relação distância / profundidade 200: 1. Imagine quantas vezes o som ricocheteará no fundo e como ele se formará no ponto de recebimento.
Tudo isso leva ao fato de que o canal de comunicação hidroacústica é muito complexo e muito instável.
Redes de sensores?
A frase de plantão parece algo assim: 95% do oceano inteiro é desconhecido para nós. É muito tentador colocar alguns “nós” no fundo (ou mesmo na coluna d'água) que medem alguns parâmetros ambientais, acumulam e, sob demanda, transferem-nos para algum lugar ao longo da cadeia. Por exemplo - em um navio científico
militar passando acima deles.
O consumo médio de energia realista de tais peças em um modo de transmissão de 5 a 15 watts. Mesmo se assumirmos que o dispositivo passa a maior parte do tempo em um sonho como um gato nobre, com base na velocidade de transmissão e na frequência aproximada das sessões de comunicação, torna-se bastante óbvio que, com uma duração razoável da bateria, a maior parte desse dispositivo será a bateria . Algumas dezenas de quilogramas de lítio, a maioria dos quais ninguém nunca levanta do fundo, porque é lavada com lodo, cresce com casca, apodrece e, em geral, é "economicamente desvantajosa".
Lembre-se de que tal coisa simplesmente não funciona o tempo todo, ou pelo menos com frequência, como um favo de mel ou um roteador Wi-Fi doméstico, embora esteja completamente indefeso na parte inferior e não seja protegido de forma alguma.
Aqui eu teria que dar um exemplo dessa rede de sensores. Bem, aqui estão eles:
Todas essas redes de teste estão, por assim dizer, na acessibilidade "remo" da costa. Todos pertencem ao projeto europeu
FP7-SUNRISE .
Abaixo está um diagrama do site do projeto que ilustra as localizações e funções de diferentes laboratórios e locais de teste:

O sucesso do projeto é difícil de julgar.
Muitos artigos foram lançados .
O orçamento total é de
5 320 023 euros . Entre os ponderadores estão muitas universidades européias, o centro belga de ciência e tecnologia da OTAN.
Status do projeto -
Encerrado em 31 de dezembro de 2016 .
Existem muitas redes de teste pequenas e diferentes, que são principalmente eventos únicos. Aqui estão algumas que chamaram minha atenção:
Os principais problemas, parece-me, são que, para o uso real de tais peças com carga útil, é necessário levar a tecnologia a um estado em que os nós da rede estejam prontos para o vôo espacial de longa distância, nem mais nem menos - jogados na água - e se despedindo mentalmente. Qualquer confusão complicada com baterias e manutenção priva toda a idéia de significado.
Outra coisa são planadores diferentes!
A força motriz de todos esses projetos é ilustrada em uma foto do site da Liquid Robotics, filha da Boeing:
Vídeo bonito sobre o que é o Wave-planador e como ele funciona:
O que é apenas um planador e como ele funciona:
Se o primeiro tiver uma plataforma de superfície visível, o segundo poderá mergulhar por semanas e meses
(mais de um ano!) Mergulhar nos mares e oceanos, raramente, raramente surfando na superfície.
A conversão e implementação de tecnologias de defesa não foram canceladas, é claro, podemos esperar que sim. De qualquer forma, Planadores e Planadores de Ondas - isso é em larga escala, é sério e por muito tempo.
Mas a linha inferior é ...... que tudo vai para o confronto de veículos autônomos carimbados por transportadores, por um lado, e submarinos nucleares, por outro, com a única diferença: no caso deste último, o lançamento de cada um desses "primeiros entre iguais" é comemorado como feriado. Bem, para o inferno com um pedaço de ferro, apenas em cada um deles há dezenas de submarinistas vivos altamente qualificados.
Então, o que dizer de caminhadas e boxe subaquáticos?
Assim como os drones aéreos, os submarinos também não são avessos a entender onde estão; também seria bom poder manter contato com eles, mesmo quando as coisas estão imersas.
Nos últimos anos, houve simplesmente um monte de publicações sobre o tópico de combater com precisão certos ataques cibernéticos efêmeros em redes de sensores subaquáticos e sistemas de posicionamento subaquático.
O boato para os autores de tais artigos é falsificação, como defini-lo e como lidar com ele.
Parece que o assunto é extremamente simples - basta pegar um modelo de sistemas de navegação por satélite, mudar a velocidade da luz para a velocidade do som, e aqui parece ser um campo totalmente novo da ciência e da tecnologia.
Vamos descobrir em que suposições tudo isso se baseia.
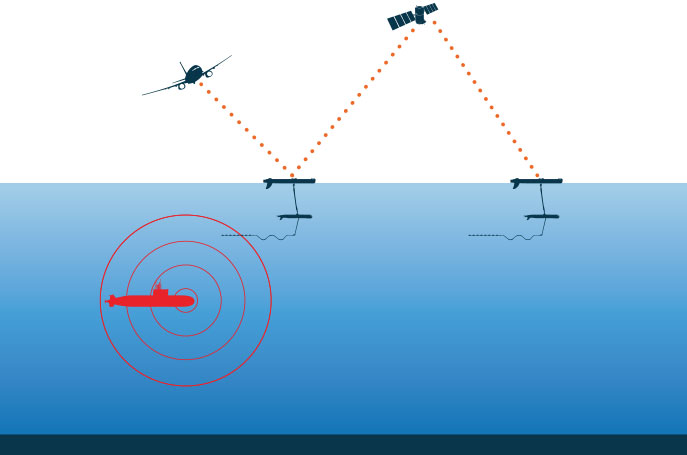
Dois tipos de spoofers geralmente são diferenciados - aqueles que estão na superfície da água e aqueles que estão na coluna de água. Os primeiros determinam suas próprias coordenadas usando o GNSS, e os últimos usando o sistema de navegação por sonar, com o qual devem confrontar.
Em publicações, como regra, estamos falando de um tipo de sistema de navegação hidroacústica a longo prazo que precisa ser comprometido. Mas prometi mitos e realidade, para que analisemos todos os principais tipos de sistemas de navegação por sonar e como eles podem ou não ser superados, mesmo aqueles que claramente não são adequados para posicionar nós da rede subaquática, nem móveis nem estacionários. Assumimos que o invasor conhece todos os algoritmos de modulação e desmodulação dos sinais, todos os atrasos e tempos do sistema, frequências, codificações e os mínimos detalhes.
Então
Sistemas rangefinder e goniômetro
São aqueles em que o ângulo e a distância até o ponto desejado são medidos para resolver o problema de navegação.
Pode haver várias opções para a operação desse sistema.
Do ponto de vista da localização da antena de localização de direção:
- Recepção na vítima móvel
- Transmissão em um farol de unidade estacionária. A antena neste caso deve ser orientada em relação aos pontos cardeais de uma maneira conhecida pela vítima móvel.
Do ponto de vista do método de determinação da distância:
- Método de solicitação-resposta
- Por pré-sincronização, o sinalizador da unidade emissora
- Iniciando "request-response" para sincronização e emitindo periodicamente um beacon de unidade
Se o método de solicitação-resposta for usado, a única opção para falsificação é estar mais perto da vítima do que o farol da unidade. Tudo é muito simples aqui - o sinal de navegação, em média, tem uma duração tangível e, por último, mas não menos importante, a duração expressa em distância (vezes a velocidade do som).
Estamos falando de dezenas e centenas de milissegundos, ou seja, cerca de dezenas e centenas de metros. O spoofer deve receber o sinal de solicitação do beacon e emitir uma resposta, simulando o atraso necessário para formar a imagem da vítima do spoofer a que distância está do beacon da unidade.
É
impossível alterar o ângulo de chegada do sinal, pois ele é avaliado objetivamente pela vítima. Tudo o que o spuffer pode fazer nessa situação é mudar o ângulo fisicamente - apenas fique do lado direito da vítima.
Além disso, o spuffer não deve permitir uma situação em que seu sinal "falso" se sobreponha ao sinal real do farol de acionamento da vítima - nesse caso, com uma probabilidade muito alta de que a vítima não receba nenhum sinal.
Embora o esquema seja escasso e, em teoria, até perigoso. Por que é completamente inoperante - um pouco mais tarde.
Se o método de pré-sincronização for usado, o spoofer, por um lado, tem algumas possibilidades de ação - não é necessário estar mais perto da vítima do que o farol da unidade, você pode simplesmente se envolver na transmissão periódica entre os sinais do farol.
Por outro lado, é mais conectado pelo período de emissão do farol de acionamento - pode ser que o sinal de substituição simplesmente não se ajuste ao espaço entre os sinais reais.
A opção com sincronização primária pelo método de solicitação-resposta e a transmissão subsequente do sinalizador de unidade novamente oferece mais oportunidades ao spoofer se ele puder fazer uma substituição no momento da sincronização primária.
A opção com uma antena de matriz em fases radiante em um farol de acionamento é ainda mais perigosa para a vítima. Se nos casos anteriores era impossível alterar o ângulo de chegada do sinal, nessa configuração, alterando os atrasos de radiação entre os diferentes elementos do conjunto de antenas em fases, qualquer ângulo desejado pode ser formado na "consciência da vítima".
Tudo parece bastante lógico e muito fácil de cair nessa isca.
Mas, de fato, todos os métodos que descrevi acima também são completamente inoperantes. Lembre-se disso por enquanto.
Sistemas rangefinder
Aqui, na grande maioria dos casos, existem pontos de referência distribuídos na superfície ou no fundo, cujas coordenadas a vítima conhece antecipadamente ou são constantemente transmitidas por esses pontos de referência. Novamente, pode haver todas as opções anteriores para determinar o intervalo - "solicitação de resposta", pré-sincronização etc.
Tudo aqui é muito semelhante a um sistema de goniômetro, com a única diferença: o spoofer precisa estar mais próximo de todos os envolvidos no processo de pontos de controle. Ele pega o sinal de solicitação da vítima da mesma maneira, substitui, se necessário, as coordenadas do ponto de referência atual (lembre-se, o spuffer conhece todos os esquemas de modulação-desmodulação e formatos de parcelas!), Forma os atrasos necessários na medida do possível. Obviamente, nesse caso, restrições sérias são impostas à localização do spuffer - ele precisa estar mais próximo do que todos os pontos de referência e até os atrasos não podem ser muito grandes - existe o risco de sobreposição de um sinal real e de troca na vítima.
E esse esquema também dificilmente pode ser usado.
Sistemas Rangefinder Diferença
Quase completamente semelhantes aos anteriores - os pontos de referência estão localizados na superfície da água ou no fundo, mas agora a vítima não irradia nada, mas apenas ouve. A operação de tais sistemas repete completamente a ideologia do GNSS - ambos os satélites transmitem suas localizações e os pontos de referência no sistema de posicionamento hidroacústico transmitem suas localizações de acordo com o relógio, sincronizado com todos os outros pontos de referência.
Geralmente, por algum motivo, esse sistema é considerado o mais suscetível a ataques de falsificação. Provavelmente porque seu trabalho se baseia quase nas mesmas equações dos sistemas GNSS.
Então, aqui tudo acontece de acordo com a mesma idéia de que, estando mais próximo da vítima do que pontos de referência reais, o spoofer envia um sinal de substituição para que ele chegue à vítima antes dos sinais reais. Porque Como os momentos absolutos da radiação não desempenham um papel, o spoofer pode transmitir sinais muito antes dos pontos de referência. Apenas as diferenças nos horários de chegada dos sinais para a vítima são importantes.
Conclusão
Todas as três classes de sistemas à primeira vista parecem suscetíveis a ataques de falsificação, o que há de errado com esses argumentos?
De fato, tudo é muito simples: a velocidade notavelmente baixa da propagação do sinal é um truque no spoofer. Para substituir algo lá, você precisa conhecer com muita precisão, não apenas a sua localização e a localização dos pontos de controle ou do farol de acionamento, é necessário conhecer a localização da vítima!
Caramba, para resolver um problema de navegação, você deve primeiro resolver um problema de navegação pelo menos três vezes!
Este spoofer no ar sabe para onde o “libertador” voa e pode alimentá-lo com dados GNSS falsificados. Sob a água, isso pode ser feito apenas dentro da linha de visão, ou seja, são alguns metros, talvez uma dúzia no caso mais otimista.
Mas os autores dessas publicações realmente perderam um detalhe tão simples?
Claro que não. Eu acho que eles entendem tudo perfeitamente. Na parte das publicações (principalmente em redes de sensores subaquáticos), essa questão não é levantada, em outras, propõe-se determinar a localização da vítima em artigos ... por sonar!
E no caso de um spuffer na coluna de água, que por si só não sabe onde está (um sistema de goniômetro de acionamento, por exemplo, não o ajudará dessa maneira - é para poder chegar a ele e não entender sua posição absoluta).
Se este for um spoofer de superfície, ele precisará abaixar a antena a uma profundidade suficiente, se quiser determinar a localização da vítima com sonar passivo ou ativo, a orientação do sonar, pendurada em um cabo flexível por várias dezenas de metros, também deve ser capaz de rastrear com precisão inatingível.
Escusado será dizer que a precisão da ecolocalização horizontal, em princípio, não é suficiente para a falsificação adequada (não se transforma em interferência!), Ou que (como a própria falsificação em si!) É simplesmente perceptivelmente encantadora debaixo d'água? E talvez a única opção seja quando o spuffer saberá exatamente a localização da vítima - quando estará fisicamente com ela, como um peixe enfiado em um tubarão-baleia.
Qual é o resultado mais provável, considerando o que escrevi sobre o alcance da comunicação e todas as condições operacionais dos nós e planadores da rede submarina?
- Se isso estiver próximo (centenas de metros - unidades de quilômetros), eles simplesmente nadarão até quem colocar o spoofer em um barco e pedirão uma explicação
- Se estiver longe (dezenas de quilômetros), os cliques não autorizados (e sem sentido!) Do sonar podem facilmente responder à "533ª frequência".
Emita ativamente sob a água - é como dirigir à noite em um carro com a luz interior acesa - pelo menos imprudentemente.Eu nem digo que o hidroacústico ainda é acústico, os sinais não exigem equipamento sofisticado de gravação, tudo é perceptível no espectro e, se ele foi projetado para longas distâncias e baixas frequências, é apenas audível.Portanto, verifica-se que o boxe, eficaz na falsificação de GNSS no ar, acaba sendo bastante estranho e sem sentido em um ambiente aquático.Tudo o que realmente funciona contra a acústica - interferência, interferência e mais uma vez interferência, quanto mais poderoso - maiores são as chances. Bem, ou apenas nadar e buscá-lo com um ottertkoy =)PS
Eu deliberadamente não forneço links para publicações, aqueles que estão interessados podem facilmente encontrar artigos sobre as palavras "falsificação acústica subaquática".Tradicionalmente, serei grato por críticas construtivas, mensagens de erro, sugestões e sugestões!