Estou desenvolvendo motores sem escova na Impulsor. Recentemente, somos frequentemente contatados para desenvolver um motor / gerador que atue como um freio. Neste artigo, falarei sobre os recursos desta aplicação de motores, quais são as vantagens e desvantagens e como implementar esse modo de operação.

Benefícios e usos
O uso do motor como freio fornece várias vantagens e parâmetros que não podem ser alcançados usando outros tipos de freios atualmente disponíveis. No entanto, essa abordagem também apresenta desvantagens.
Vantagens:
- Ajuste rápido do torque de ligar / desligar e de frenagem.
- Vasta gama de rotações de trabalho. É possível fazer um freio de rotação excessiva (até 100.000 rpm) e vice-versa, é muito lento.
- Configuração de carga suave, sem travamento aleatório do eixo.
- Falta de poeira e resíduos do freio. Pode ser usado em ambientes fechados ou em um espaço confinado.
- Pode ser usado como um gerador.
Desvantagens:
- Limitações na temperatura de operação de até 150, 200 graus. É possível elevar um pouco a temperatura, mas ao mesmo tempo o preço do produto aumenta muito.
- Um freio comum de um disco e pastilhas nas mesmas dimensões será mais eficaz.
- Fortes limites de torque em baixas rotações e incapacidade de bloquear completamente o eixo. Essa limitação pode ser contornada usando um controlador de energia externo.
- A presença constante de um pequeno torque de frenagem.
Devido à sua velocidade, precisão e limpeza, esse freio é indispensável em laboratórios e dispositivos internos. Um análogo próximo do freio a motor é um freio a pó. É igualmente rápido, não cria poeira, mas não pode funcionar em altas velocidades e a maioria dos modelos existentes é completamente limitada a 1500-3000rpm. Um freio a disco convencional não é capaz de fornecer a mesma precisão e estabilidade.
Modos de operação
Existem 3 modos de frenagem disponíveis para o freio eletromagnético, que diferem em relação à direção da energia da frenagem:
- Circuito e modo de liberação de calor diretamente no motor.
- Geração de calor em uma carga externa, resistência ou transistor bipolar.
- Recuperação e carregamento da bateria.
A seguir, falarei mais sobre esses modos para motores síncronos com ímãs permanentes BLDC, isso também se aplica a CC comum.
1. Modo de Circuito
Este é o modo mais fácil. Nele, os contatos do motor simplesmente fecham e a potência de frenagem é alocada à resistência do enrolamento do motor. Os motores foram originalmente projetados com uma inclinação para resfriamento e, além disso, possuem uma capacidade de massa e calor suficientemente grande. Isso permite que você use intensivamente esse modo sem modificações no motor / gerador.
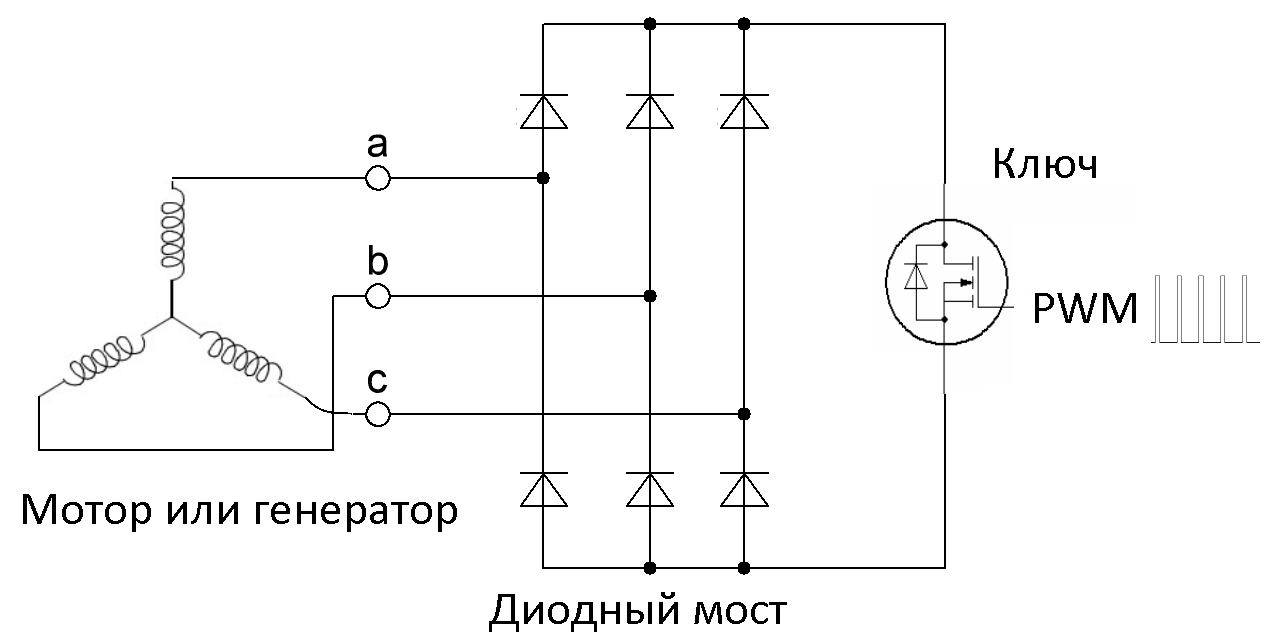
Para implementar este modo, uma ponte de diodos e uma chave mecânica (botão, interruptor de faca ou relé) ou chave eletrônica (MOSFET, IGBT) são suficientes. Para ajustar a força de frenagem, é usado um PWM, que define o ciclo de trabalho da abertura da chave. O diagrama de conexão é o seguinte:
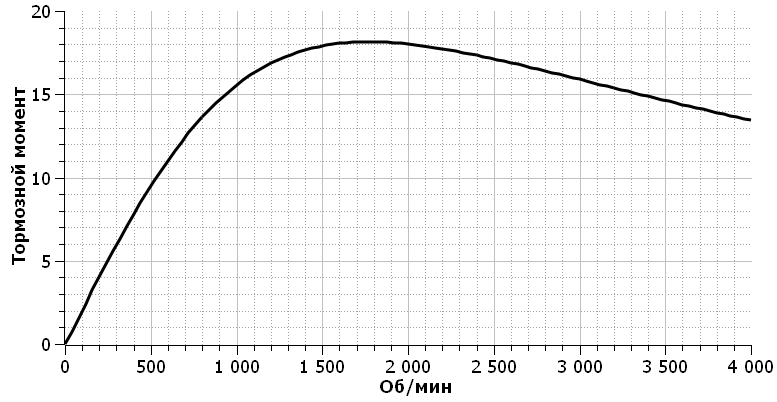
Este modo tem uma característica interessante. Com o aumento da velocidade, o torque máximo de frenagem diminui. Isso se deve ao fato de o enrolamento do motor apresentar uma indutância significativa e, com o aumento da velocidade, a frequência das correntes também aumenta. Como resultado, a reatância do enrolamento excederá a ativa e a perda de potência será inferior ao máximo possível para este motor. A dependência característica do torque máximo de frenagem nas rotações é mostrada no gráfico abaixo:
Apesar do fato de que qualquer motor pronto pode ser usado imediatamente nesse modo, este modo não permitirá revelar todo o potencial do produto. No entanto, o desempenho do freio neste modo pode ser significativamente aumentado, ele foi originalmente projetado como um freio.
Este modo tem outra desvantagem importante. Devido ao fechamento e abertura rápidos e repentinos dos enrolamentos, uma forte interferência eletromagnética ocorrerá. Além disso, a ponte de diodos deve ser projetada para grandes correntes pulsadas.
2. Com carga externa
Nesse modo, a principal fonte de calor da frenagem é a resistência externa. Este modo é muito mais eficaz, uma vez que a potência de frenagem não é mais limitada pelo dissipador de calor do calor do motor e o radiador de resistência pode ser arbitrariamente grande. Além disso, se o valor da resistência for ajustado corretamente, o torque máximo de frenagem será maior do que apenas ao fechar e quanto maior a velocidade, mais significativo isso se manifestará.
Para implementar esse modo, também é necessária uma ponte de diodos, mas depois é ligado um reostato mecânico ou um transistor bipolar com um circuito de controle de corrente ou resistência (circuito eletrônico de carga). O diagrama de conexão é o seguinte:

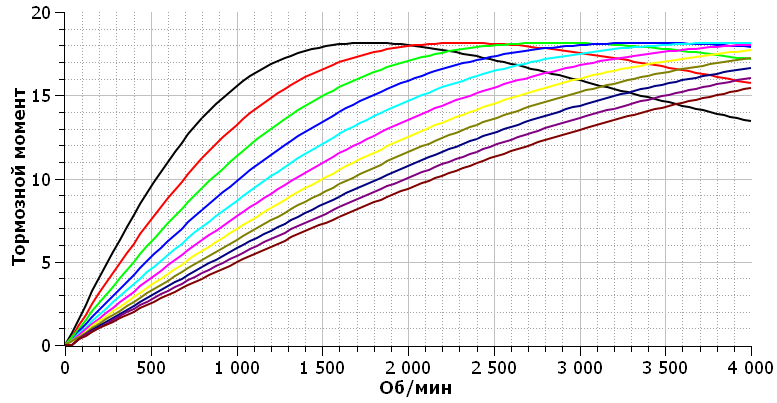
Com uma pequena quantidade de resistência externa em relação à resistência do motor, a natureza do torque de frenagem estará próxima ao primeiro modo. Com o aumento da resistência, o ponto de pico de torque mudará para rotações altas e a potência máxima de frenagem aumentará. A dinâmica do torque de frenagem com o aumento da resistência à carga é mostrada no gráfico abaixo:
Este modo permite que você atinja a faixa desejada de rotações de operação na área em que o torque de frenagem aumenta com o aumento das rotações. Este modo de operação é extremamente bem-sucedido, pois permite estabilizar a velocidade ou limitá-la. Um sistema de feedback estável é formado.
3. Recuperação
Este modo é o mais difícil de implementar. Requer um controlador (ESC) semelhante aos usados para controlar os motores sem escova BLDC. Mas, ao mesmo tempo, esse modo é o mais eficaz. É capaz de eliminar a maioria das desvantagens deste tipo de freio. Assim, por exemplo, o controlador permitirá bloquear completamente o eixo do motor, usar o freio simultaneamente no modo de geração e de frenagem controlada e, nesse modo, você poderá obter momentos de frenagem significativamente maiores do que no 2x anterior.
Neste artigo, não descreverei em detalhes o dispositivo do controlador e seus algoritmos de operação, como este tópico é para um artigo separado, e possivelmente não para um. Para quem deseja entender esse problema, você pode estudar o princípio do controlador em veículos elétricos (bicicletas, scooters) e como eles implementam os algoritmos de frenagem e recuperação.
Conclusão
Motores e geradores são opções simples e baratas para um freio elétrico com parâmetros exclusivos. Esse freio não é universal e não permitirá substituir os freios a disco clássicos, mas, para algumas tarefas, está além da concorrência.