Em 1495, Leonardo da Vinci criou um desenho de armadura viva. E somente depois de 425 anos, o escritor checo de ficção científica Karel Čapek usou pela primeira vez a palavra "robô" em sua peça "RUR". Os robôs modernos são muito mais inteligentes, mais complexos e mais móveis que o robô da Vinci, mas têm características comuns. Um deles é o material a partir do qual essas incríveis máquinas são feitas. Quando falamos de robôs, na maioria das vezes imaginamos algo sintético, não sem razão nos livros e filmes de robôs, às vezes chamados de sintéticos.
No entanto, os robôs podem ser criados não apenas a partir de metal, plástico ou fibra de carbono. Cientistas da Universidade de Vermont (EUA) decidiram usar gaiolas para sapos como materiais de construção. Os robôs microscópicos resultantes, chamados "xenobots", são capazes de viajar pelo corpo de um organismo vivo e executar suas tarefas. Como exatamente os cientistas criaram vida artificial, de que talentos os xenobots podem se orgulhar e onde uma invenção tão incomum pode ser aplicada? Aprendemos sobre isso no relatório do grupo de pesquisa. Vamos lá
Base de estudo
Criar um mecanismo que executará algumas tarefas sob o controle da inteligência artificial não é tão difícil hoje em dia. Não é difícil reconstruir o organismo existente, alterando sua estrutura, funções ou características. No entanto, criar vida a partir do zero não é uma tarefa fácil. Pesquisadores da Universidade de Vermont dizem que os materiais sintéticos são usados em robótica, em grande parte devido à simplicidade de sua fabricação, implementação e integração. Exagerar dizendo que o metal sempre pode ser derretido, reforçado ou afiado. Mas organismos vivos, tecidos e células, isto é, sistemas vivos demonstram a estabilidade da estrutura e funções. Eles são muito resistentes a interferências externas destinadas a mudar seu comportamento.
Ao mesmo tempo, as células vivas, especialmente as embrionárias, demonstram características surpreendentes das quais nem os robôs sintéticos mais desenvolvidos podem se gabar. As células embrionárias são capazes de se auto-organizar, realizando os processos de desenvolvimento e regeneração dos tecidos, dependendo da situação. Manipulações com essa capacidade podem permitir a criação de uma morfologia sintética, através da qual novas formas de vida podem ser realizadas, não importa quão alto seja. Além disso, o processo de auto-organização celular pode ser supervisionado, fornecendo à estrutura futura as funções e características necessárias.
No momento, já existem vários métodos para desenvolver e criar sistemas vivos individuais. Por exemplo, organismos unicelulares podem ser modificados por meio de genomas refatorados (transformados), mas isso ainda não é possível de ser implementado em sistemas multicelulares.
Você também pode modificar a cadeia de células alterando as condições de cultura. Mas, neste caso, o controle sobre os processos e sobre a estrutura e funções será mínimo. Por outro lado, há desenvolvimentos no campo da bioengenharia, onde são estudadas estruturas tridimensionais. Esta opção dará mais controle. Mas a incapacidade de prever o comportamento de uma estrutura biológica arbitrária limita essa técnica à montagem de máquinas biológicas baseadas nas existentes. Em outras palavras, será a mesma modificação do que já está lá, mas não a criação de um novo organismo vivo.
Apesar de todas as dificuldades e obstáculos, existem maneiras. Uma delas é a pesquisa computacional em conjunto com a impressão tridimensional. Diferentemente do aprendizado de máquina, a pesquisa é um processo evolutivo que permite projetar a estrutura física de uma máquina e seu comportamento a partir do zero. Além disso, esse método não está vinculado a nenhum tipo específico de estrutura que está sendo criada ou a quaisquer funções específicas. O mesmo algoritmo evolutivo pode ser usado para desenvolver sistemas diferentes: drogas, metamateriais e até máquinas autônomas.
Em nosso estudo de hoje, os cientistas demonstraram uma abordagem escalável para o design de sistemas vivos usando um algoritmo evolutivo.
 Imagem Nº 1
Imagem Nº 1O novo método é organizado como um transportador linear, que usa como entrada a descrição dos componentes biológicos usados e o comportamento desejado que o sistema fabricado deve demonstrar. O transportador exibe continuamente sistemas de vida saudáveis que implementam o comportamento especificado de diferentes maneiras. Os sistemas vivos resultantes são novas coleções de células que têm muito pouco a ver com órgãos ou organismos existentes.
Resultados da pesquisa
O transportador é organizado como uma sequência de geradores e filtros. O primeiro gerador é um algoritmo evolutivo que descobre várias maneiras de combinar blocos de construção biológicos para realizar o comportamento desejado. Para começar, é criada uma população de variantes aleatórias de futuros modelos de sistema. Cada modelo é recriado em um ambiente virtual, após o qual uma classificação de desempenho é atribuída automaticamente. Modelos menos produtivos são excluídos e substituídos por cópias acidentalmente modificadas de modelos mais produtivos. A repetição desse processo leva à formação de populações de padrões diversos e não repetitivos.
Processo de design de apresentação de vídeo de organismos reconfiguráveis.Como é provável que haja muitas diferenças entre a mídia física simulada e a de destino, os modelos efetivos são passados por um filtro de estabilidade (confiabilidade) que permite que apenas aqueles que suportam o comportamento desejado, apesar do ruído (mudanças no ambiente), passem.
Os modelos resistentes ao ruído sobreviventes são passados por um filtro de montagem, que remove modelos que não são adequados para o método de montagem atual ou que não podem ser escalados para tarefas mais complexas no futuro. A capacidade de fabricação depende do tamanho mínimo de concavidade, que será preservado em grupos de células-tronco em desenvolvimento, que tendem a fechar pequenas lacunas em sua geometria geral. A escalabilidade do modelo depende de sua parcela de tecido passivo, que fornece espaço para futuros sistemas ou cargas úteis de órgãos (ou seja, espaço para armazenar uma substância transportável, como um medicamento).
 Xenopus laevis
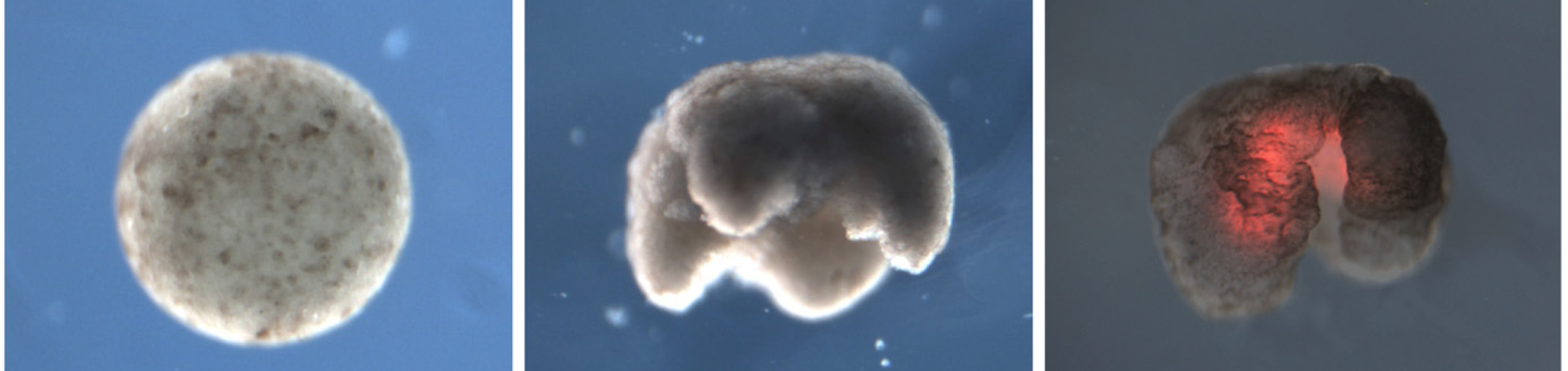
Xenopus laevisModelos que passam com sucesso pelo filtro de montagem são formados a partir de tecido vivo. As células-tronco pluripotentes
* são colhidas primeiro a partir de embriões de
Xenopus laevis (sapo liso do esporão) no estágio da blástula, depois são dissociadas e combinadas para atingir o número desejado de células.
As células pluripotentes * são capazes de diferenciar (transformar) em todos os tipos de células, exceto as células de órgãos extra-germinativos.
Após o período de incubação, o tecido agregado é formado manualmente por subtração usando uma combinação de pinças para microcirurgia e um eletrodo de cauterização com uma agulha de 13 μm.
Além disso, o tecido contrátil é mergulhado no corpo através da introdução de células progenitoras do coração do sapo, que naturalmente se desenvolvem em cardiomiócitos (músculo cardíaco). Essas células criarão ondas contráteis em certos locais do organismo criado.
O resultado de todas essas manipulações foi uma representação ao vivo tridimensional do modelo, que tem a capacidade de se mover independentemente pelo ambiente aquático por vários dias e até semanas sem nutrientes adicionais.
A apresentação em vídeo é o processo de criação de organismos reconfiguráveis.Os organismos resultantes são posteriormente introduzidos no ambiente físico real para monitorar seu comportamento.
Em seguida, os cientistas compararam as observações com os resultados da modelagem para identificar o fato da transição do comportamento de "sintéticos" para "orgânicos".
Um aspecto importante da técnica é a continuação do algoritmo evolutivo, mesmo após a introdução de organismos prontos para o ambiente. Alguns deles, apesar de serem úteis no estágio de desenvolvimento, podem não exibir o comportamento exato esperado. Tais modelos de organismos são removidos do algoritmo, o que leva à criação de organismos da próxima vez mais estáveis e ambientalmente adequados.
Assim, foram realizados 4 trechos do transportador. O resultado disso foram quatro tipos de organismos, demonstrando as seguintes características: locomoção, manipulação de objetos, transferência de objetos e comportamento coletivo. Agora vamos falar mais sobre cada um dos recursos.
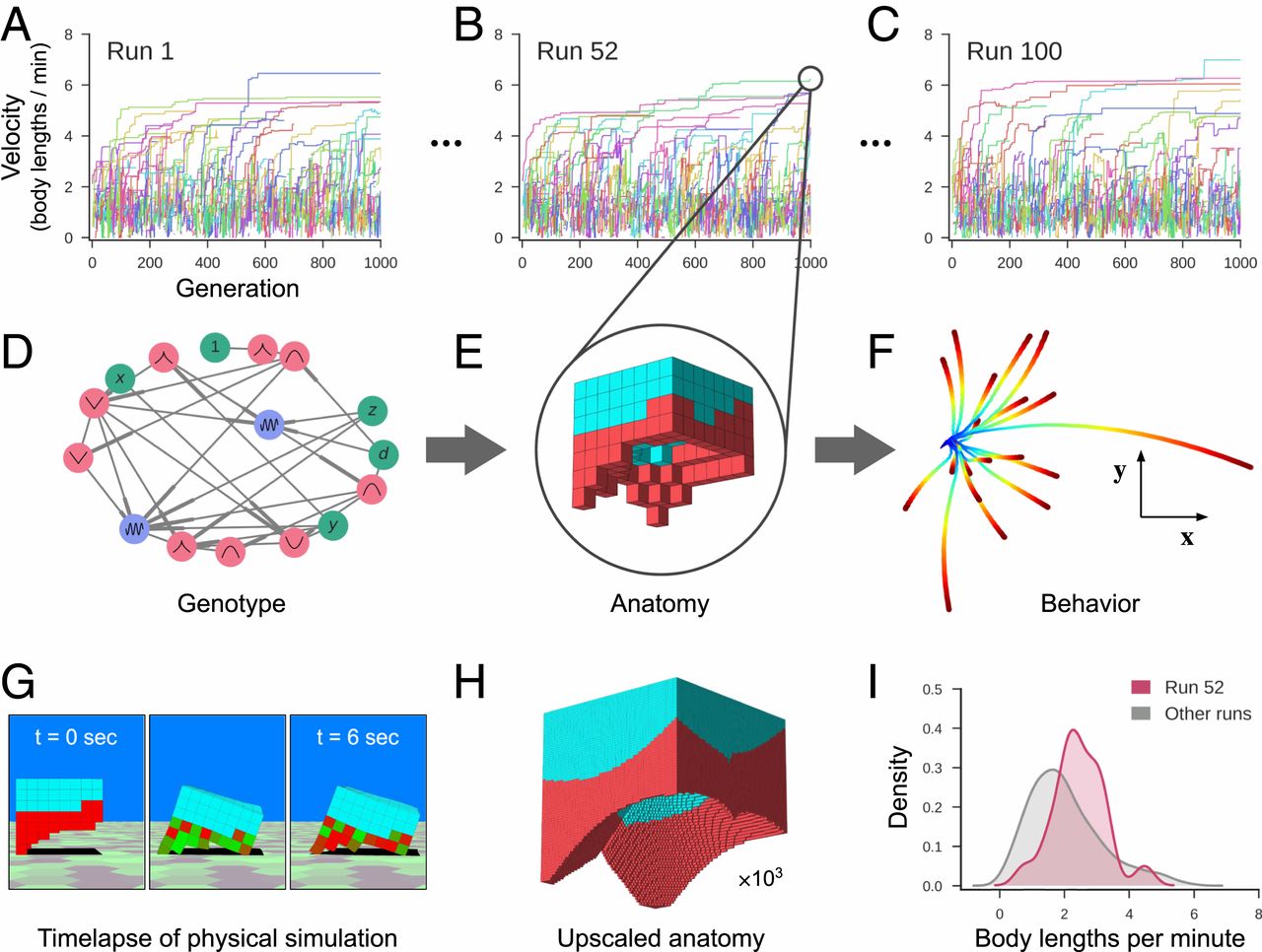 Imagem No. 2
Imagem No. 2Para obter um conjunto diversificado de modelos, foram realizados 100 testes independentes do algoritmo evolutivo (
2A -
2C ), cada um dos quais começou com um conjunto diferente de modelos aleatórios iniciais. Durante cada teste, os modelos foram selecionados com base no deslocamento líquido (deslocamento) alcançado durante um período de 10 segundos (com uma contração aleatória, com modulação de fase, cíclica a 2 Hz). No decorrer de cada teste, parâmetros de seleção adicionais foram aplicados na forma de estimular a competição dentro e entre linhas genéticas únicas, o que levou à formação de uma dinâmica ambiental única. Ao final de cada teste, os modelos mais adequados foram removidos (
1A ) e passados por filtros e montagens de estabilidade. No processo dessa filtragem, foram selecionados os modelos que mantinham a locomoção rápida durante o dimensionamento e a montagem (imagem nº 3).
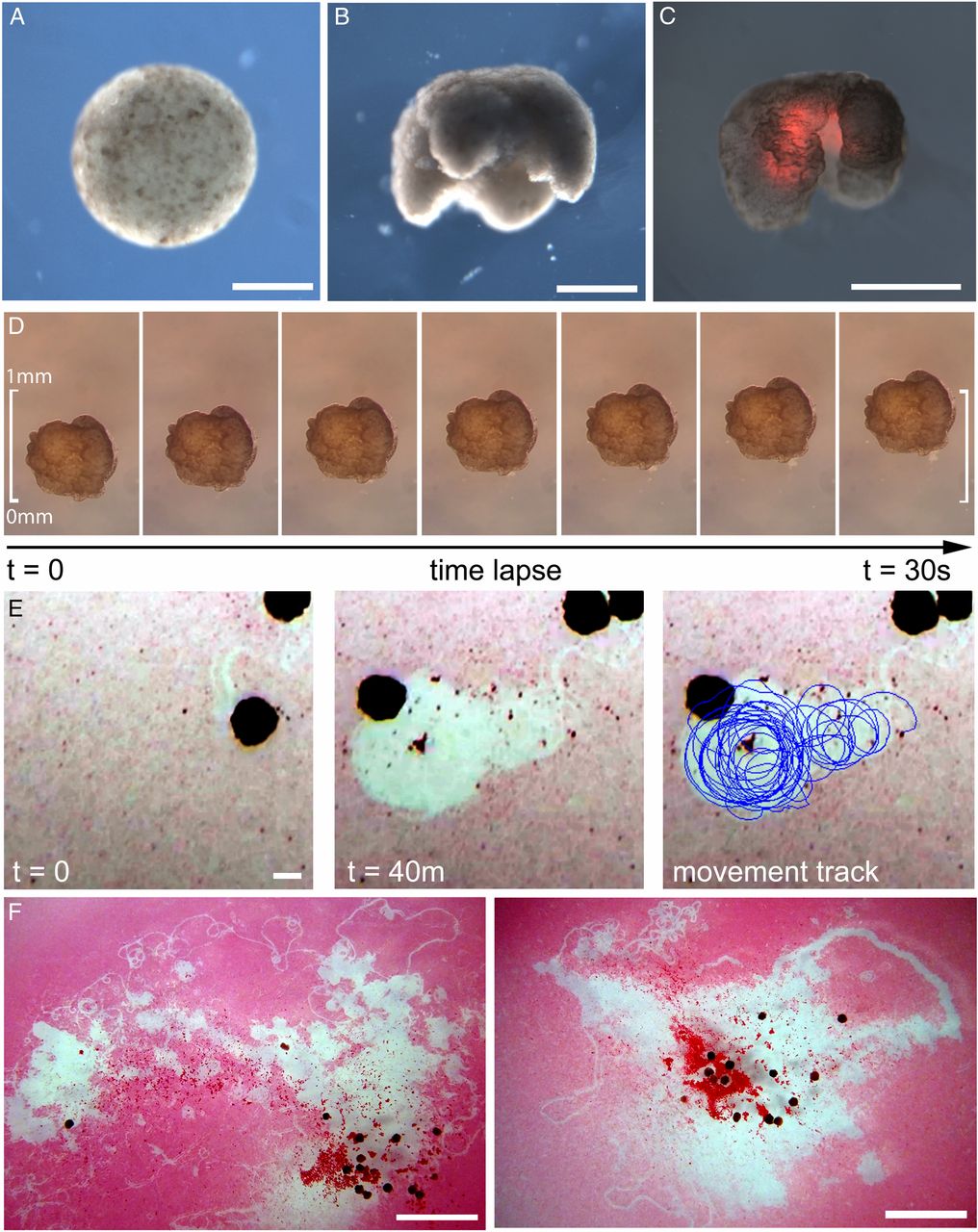 Imagem No. 3
Imagem No. 3Vale ressaltar que os cílios (cílios, cabelos finos na superfície celular) não foram modelados durante o processo de design e foram suprimidos durante testes práticos por microinjeção embrionária de mRNA que transcreve o domínio intracelular de Notch. Assim, todos os movimentos dos organismos foram realizados exclusivamente através da redução do tecido muscular cardíaco.
As trajetórias de organismos decilados simulados e realizados (sem cílios) foram comparados em duas orientações: vertical e invertida, ou seja, invertido 180 ° em relação ao plano transversal. As observações mostraram que pelo menos uma das variantes dos modelos do corpo realizou com sucesso o comportamento dado em uma orientação vertical, mas não em um invertido (imagem nº 4).
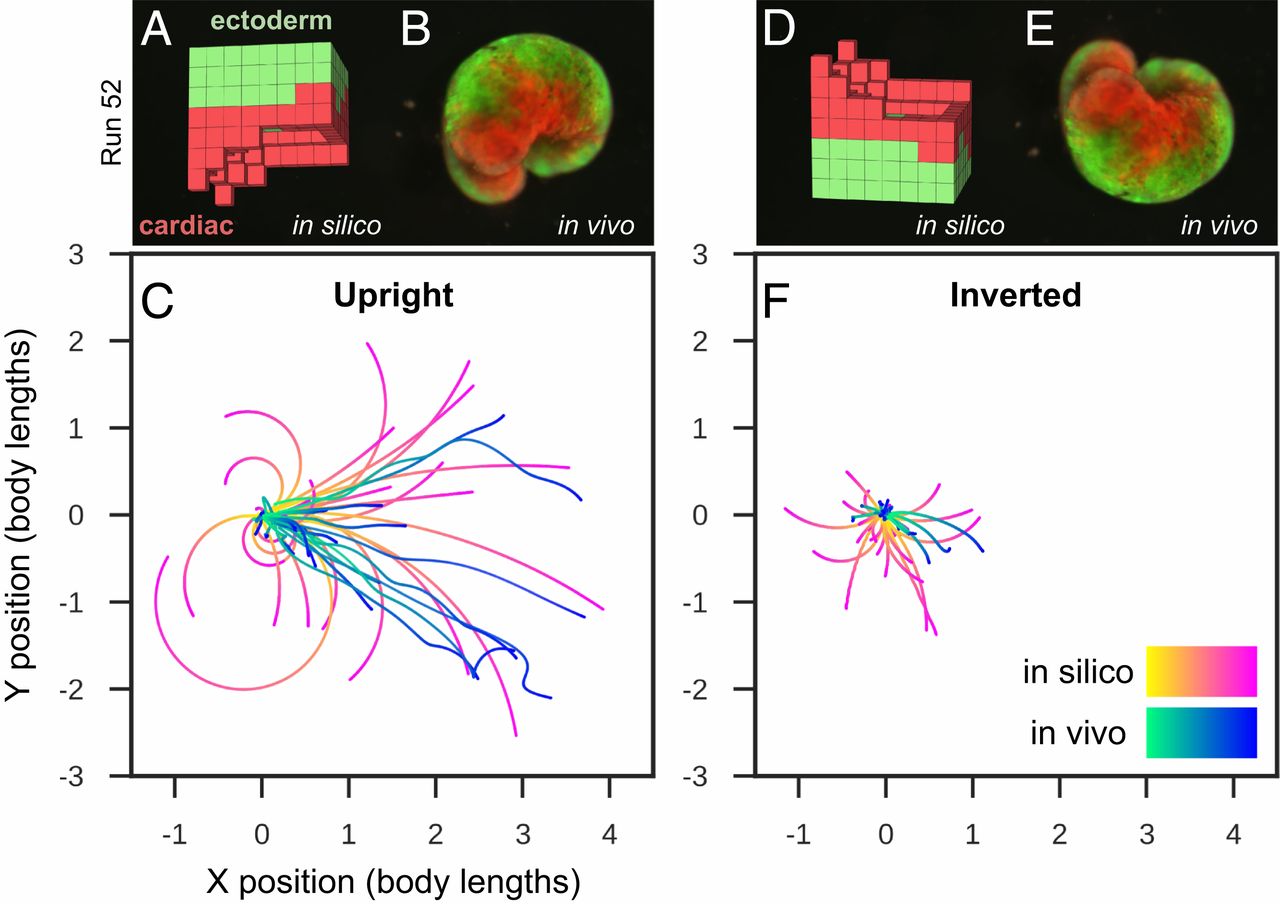 Imagem No. 4
Imagem No. 4A direção do movimento dos organismos com orientação vertical coincidiu com a direção do modelo sob distúrbios aleatórios. Isso sugere que um movimento bem-sucedido no espaço não é aleatório, mas é o resultado do design do modelo do próprio organismo.
O segundo recurso é a manipulação de objetos. Quando havia partículas sólidas no ambiente dos organismos em teste, o primeiro começou a se combinar espontaneamente com eles, tanto na modelagem quanto na prática (
3F ).
Esse comportamento dificilmente pode ser chamado de estruturado, pois os parâmetros de tarefa necessários não foram definidos. Isso pode ser realizado com mais precisão, adicionando dados mais precisos: por exemplo, indique a área que precisa ser limpa de partículas ou indique um tipo específico de partículas que precisam ser removidas, ignorando todas as outras. O segundo comportamento foi implementado, mas até agora em um nível primitivo.
No estágio seguinte, os organismos que demonstram a capacidade de transportar objetos foram testados. Alguns dos organismos foram projetados para reduzir o arrasto hidrodinâmico através de um orifício no centro do seu plano transversal. No entanto, não havia tecidos contráteis nessa área do corpo.
Esse buraco nos ciclos subsequentes do algoritmo evolutivo pode ser transformado em uma espécie de bolsa para transferência de objetos, que pode ser usada para entrega localizada de medicamentos.
Outra característica é o comportamento coletivo. Durante a implementação prática, uma colisão de dois organismos foi observada, levando à formação de uma conexão mecânica temporária. Esses dois organismos começam a girar em torno um do outro e, depois de algumas revoluções, se separam novamente ao longo das trajetórias tangenciais. Esse comportamento será muito mais pronunciado se você não suprimir o desenvolvimento dos cílios, pois eles levam ao "entrelaçamento" dos dois organismos um com o outro, ou seja, sua conexão se torna muito mais longa.
Para um conhecimento mais detalhado das nuances do estudo, recomendo que você analise o
relatório dos cientistas e
materiais adicionais .
Epílogo
Não é difícil chamar este estudo de único, dados seus resultados. Os cientistas pegaram células de sapo e criaram a partir deles novos organismos multicelulares que executam funções específicas em graus variados de sucesso. Até os autores deste trabalho entendem que muitos estão assustados com a perspectiva de robôs autônomos, um tanto pensantes, para não falar de novas formas de vida. No entanto, na sua opinião, este estudo permite uma melhor compreensão da própria vida como um fenômeno. Além disso, os xenobots desenvolvidos podem servir na medicina, tornando-se nano-cirurgiões vivos, removendo células nocivas e patogênicas do corpo do paciente ou nano-mensageiros de medicamentos, entregando-os diretamente para onde combaterão mais eficazmente a doença.
A vida em todas as suas formas e manifestações é impecável, apesar de todas as deficiências. Todo ser vivo evoluiu para se adaptar às mudanças nas condições de vida. A ciência moderna é capaz de criar vida, mas apenas dentro da estrutura de mudança de organismos existentes. Mas criar algo novo a partir do zero é uma tarefa completamente diferente, mais difícil, mais ambiciosa. Existem exemplos de organismos criados artificialmente, mas eles não podem ser comparados com os descritos por escritores de ficção científica. Apesar disso, cientistas de todo o mundo não param suas pesquisas, na esperança de criar uma nova forma de vida. Ainda é difícil dizer o quão perigoso é brincar com a natureza. No entanto, de acordo com escritores de ficção científica, essas descobertas não serão boas. No entanto, obras de literatura de ficção científica, embora em muitos aspectos prevejam o futuro da sociedade em geral e da ciência em particular, são apenas uma invenção da imaginação do autor. Como exatamente as tecnologias atualmente desenvolvidas, incluindo xenobots, serão usadas, depende apenas de nós mesmos.
Obrigado pela atenção, fique curioso e tenha um ótimo final de semana a todos, pessoal! :)
Um pouco de publicidade :)
Obrigado por ficar conosco. Você gosta dos nossos artigos? Deseja ver materiais mais interessantes? Ajude-nos fazendo um pedido ou recomendando aos seus amigos o
VPS baseado em nuvem para desenvolvedores a partir de US $ 4,99 , um
analógico exclusivo de servidores básicos que foi inventado por nós para você: Toda a verdade sobre o VPS (KVM) E5-2697 v3 (6 núcleos) 10 GB DDR4 480 GB SSD 1 Gbps de US $ 19 ou como dividir o servidor? (as opções estão disponíveis com RAID1 e RAID10, até 24 núcleos e até 40GB DDR4).
Dell R730xd 2 vezes mais barato no data center Equinix Tier IV em Amsterdã? Somente temos
2 TVs Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV a partir de US $ 199 na Holanda! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - a partir de US $ 99! Leia sobre
Como criar um prédio de infraestrutura. classe usando servidores Dell R730xd E5-2650 v4 custando 9.000 euros por um centavo?