Para obter dados de treinamento suficientes para robomobiles, você não precisa usar multidões de pessoas marcando vídeos manualmente

Depois de ler um livro sobre um tópico específico, você não se tornará um especialista nele. Como você pode não se tornar ele lendo muitos dos mesmos livros? Para se tornar um verdadeiro profissional em qualquer campo do conhecimento, é necessário coletar uma grande quantidade de informações de várias fontes.
O mesmo vale para os robomobiles e outras tecnologias baseadas na IA.
As redes neurais profundas responsáveis pela operação do robomóvel exigem treinamento abrangente. Eles precisam estudar as situações que podem enfrentar nas condições cotidianas e os casos incomuns que nunca terão que enfrentar se tiverem sorte. A chave do sucesso é garantir que eles sejam treinados com os dados corretos.
Mas o que são dados adequados? São situações novas ou incertas, e não uma repetição constante das mesmas.
O aprendizado ativo é um método de seleção de dados de aprendizado para aprendizado de máquina que encontra automaticamente esses dados diversos. Além disso, ele coleta conjuntos de dados por uma pequena fração do tempo que levaria as pessoas a concluir essa tarefa.
Ele funciona com a ajuda de um modelo treinado, que itera sobre os dados coletados e marca esses quadros com o reconhecimento dos quais teve dificuldades. Então esses quadros são marcados por pessoas. Em seguida, eles são adicionados aos dados de treinamento. Isso aumenta a precisão do modelo em situações como o reconhecimento de objetos em condições difíceis.
Como procurar uma agulha em uma pilha de dados
A quantidade de dados necessários para treinar um robomóvel é monstruosa. Especialistas da
RAND Corporation acreditam que o carro precisa percorrer 17 bilhões de quilômetros para superar a pessoa com precisão em 20%. Para fazer isso, uma frota de 100 carros no mundo real teria que dirigir continuamente por 500 anos.
Além disso, nem todos os dados obtidos durante a condução na estrada são adequados para esta tarefa. Dados de treinamento eficazes devem conter condições diversas e complexas para garantir uma viagem segura.
Se as pessoas estivessem envolvidas na pesquisa e marcação desses dados, o processamento dos dados recebidos por uma frota de 100 carros que viajavam 8 horas por dia exigiria o trabalho de mais de um milhão de marcadores, que precisavam marcar dados de todas as câmeras de todos os carros - claramente uma tarefa impossível. Além do custo do trabalho humano, a alocação de recursos para armazenamento de dados e computação em rede neural seria impraticável.
A combinação de marcação e aprovação de dados representa um sério desafio ao desenvolvimento de robomobiles. Ao aplicar a IA a esse processo, você pode economizar tempo e dinheiro em treinamento, enquanto aumenta a precisão das redes neurais.
Por que a aprendizagem ativa
Existem três métodos comuns para selecionar dados para treinar redes neurais de robomobiles. A amostragem aleatória seleciona os quadros do banco de dados em intervalos regulares, que descrevem os cenários mais comuns, mas é provável que ocorram casos raros.
A amostragem baseada em metadados usa rótulos básicos (por exemplo, “chuva”, “noite”) para amostrar dados, facilitando a localização de situações difíceis comuns, mas também faltando quadros únicos que não podem ser facilmente classificados - como um reboque com um trator ou uma pessoa com jumpers. atravessando a rua.
 Comparação da cena habitual na estrada (canto superior esquerdo) com cenários incomuns: um ciclista noturno na roda traseira, uma caminhonete com um trailer com um trailer, um pedestre com jumpers.
Comparação da cena habitual na estrada (canto superior esquerdo) com cenários incomuns: um ciclista noturno na roda traseira, uma caminhonete com um trailer com um trailer, um pedestre com jumpers.Por fim, a amostragem manual usa tags de metadados junto com as pessoas que visualizam os quadros - essa tarefa é demorada, propensa a erros e não é bem dimensionada.
O aprendizado ativo torna possível automatizar o processo de seleção de quadros, enquanto seleciona pontos de referência valiosos nos dados. Começa com o treinamento de uma rede neural especial em dados já rotulados. Depois disso, a rede processa os dados não alocados, escolhendo quadros que não podem reconhecer - assim, procura dados que serão difíceis para o algoritmo do carro robô. Em seguida, esses dados são estudados e marcados por pessoas e adicionados ao banco de dados de treinamento.
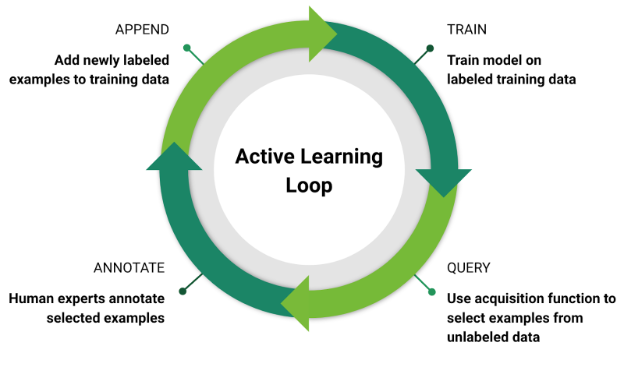 Loop de aprendizado ativo: para treinar o modelo em dados rotulados, fazer uma seleção de dados não alocados, marcar dados selecionados usando trabalho humano, adicionar novos dados rotulados ao banco de dados; repita.
Loop de aprendizado ativo: para treinar o modelo em dados rotulados, fazer uma seleção de dados não alocados, marcar dados selecionados usando trabalho humano, adicionar novos dados rotulados ao banco de dados; repita.O treinamento ativo já demonstrou sua capacidade de aumentar a precisão da operação de redes neurais de robomobiles em comparação com a adição manual de dados. Em nosso
estudo, descobrimos que o aumento na precisão ao usar o treinamento ativo excede o aumento na precisão, com amostragem manual de dados até 3 vezes para reconhecimento de pedestres e até 4,4 vezes para ciclistas.
Ao mesmo tempo, métodos avançados de treinamento para redes neurais, por exemplo, aprendizado ativo, aprendizado de
transferência e
aprendizado colaborativo, funcionam com mais eficiência em uma infraestrutura confiável e escalável que permite processar simultaneamente grandes quantidades de dados, diminuindo o ciclo de desenvolvimento. O acesso a essas capacidades é fornecido pelo projeto
NVIDIA GPU Cloud , onde existem as ferramentas de treinamento mencionadas e uma grande biblioteca de redes neurais profundas para robomobiles.