Antecedentes
O verão quente estava terminando, atrás havia umas maravilhosas férias em família no mar quente e suave, e os contornos dos dias de trabalho cinzentos já eram visíveis à frente. Para não sucumbir à depressão do outono, era urgente fazer algo agradável e útil, e isso não demorou muito: o filho mais velho teve que preparar o trabalho para a conferência da escola. O tema do trabalho já está no ar há muito tempo. Estou acompanhando com grande interesse as publicações do autor da Neoprog, “Development of hexapod from zero”. E foram seus artigos que nos inspiraram a trabalhar nessa direção.
Construção civil
Como elementos estruturais principais, escolhemos os servos MG-996R. Das características reivindicadas, elas têm características de potência e potência relativamente altas a um custo relativamente baixo. As dimensões e o design deste servoconversor formaram a base para o design adicional do robô, que originalmente planejávamos fabricar em plástico usando impressão 3D.
O primeiro passo foi criar e testar um protótipo funcional de um único membro.

Não tendo experiência em programas de modelagem 3D, decidimos frivolamente traduzir nossos esboços de papel em um modelo tridimensional usando o editor do construtor 3D incorporado no Windows 10. Por toda a sua simplicidade, este editor possui um arsenal bastante extenso e permite criar modelos 3D bastante complexos.
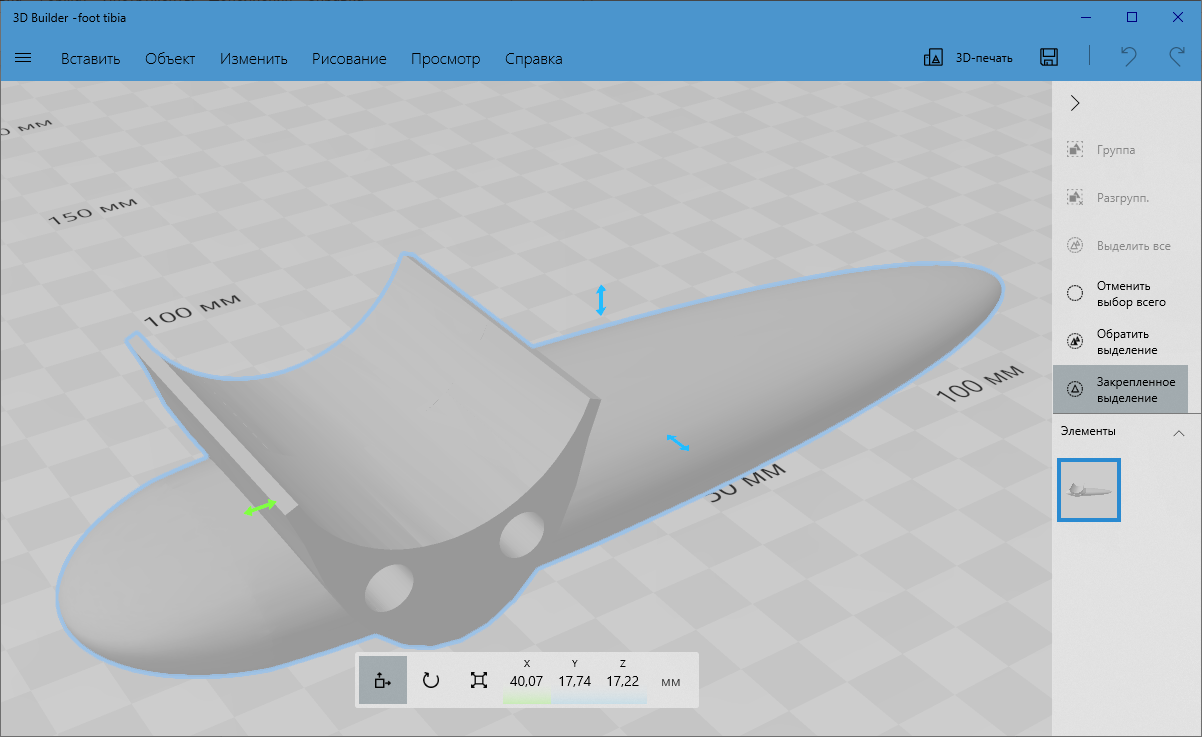
Mas a simplicidade de trabalhar neste editor também é seu ponto fraco. A falta de controle sobre o número de vértices no modelo leva ao fato de que, após trituração e colagem repetidas, o modelo de aparência simples começa a ter um
mundo interno enorme com o número de polígonos e o editor começa a se envolver em algum tipo de recálculo interno do modelo, permitindo apenas contemplar sua criação sem a capacidade de editar algo.
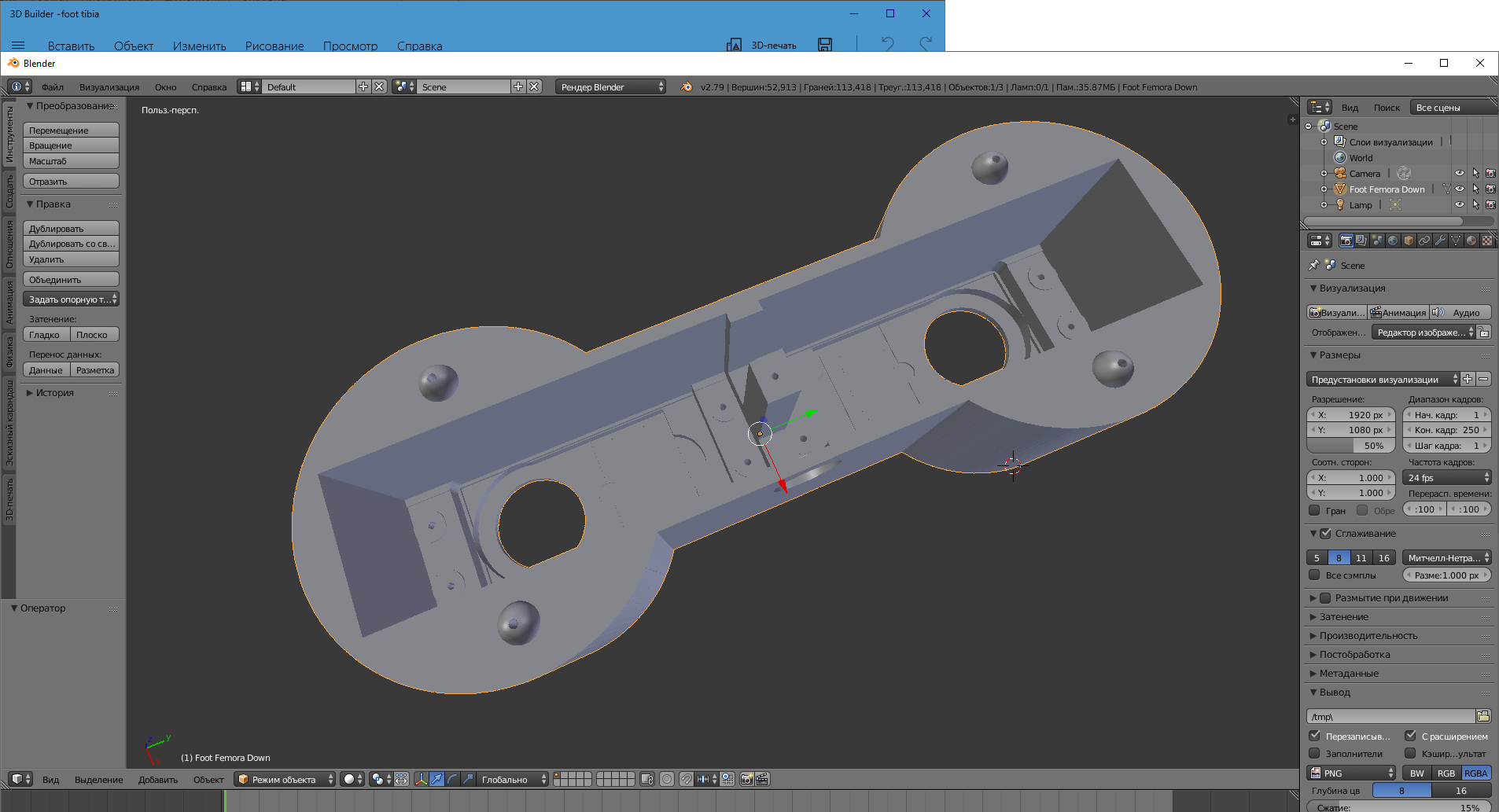
Após uma análise rápida dos editores disponíveis, era costume usar o Blender por causa de sua livre
e incompreensibilidade e pelo fato de eu ter me comprometido a estudá-lo várias vezes e todas as tentativas terminarem em fracasso. Desta vez, a presença de um objetivo específico deu frutos. A habilidade mínima, mas suficiente no editor, foi reduzida e continuamos o desenvolvimento. Gostaria de observar que, no futuro, não nos recusamos completamente a trabalhar em um construtor de 3D. Ainda é muito mais conveniente executar algumas ações de acabamento com o modelo: fazer orifícios para parafusos, cortar cavidades internas de forma complexa e muito mais.
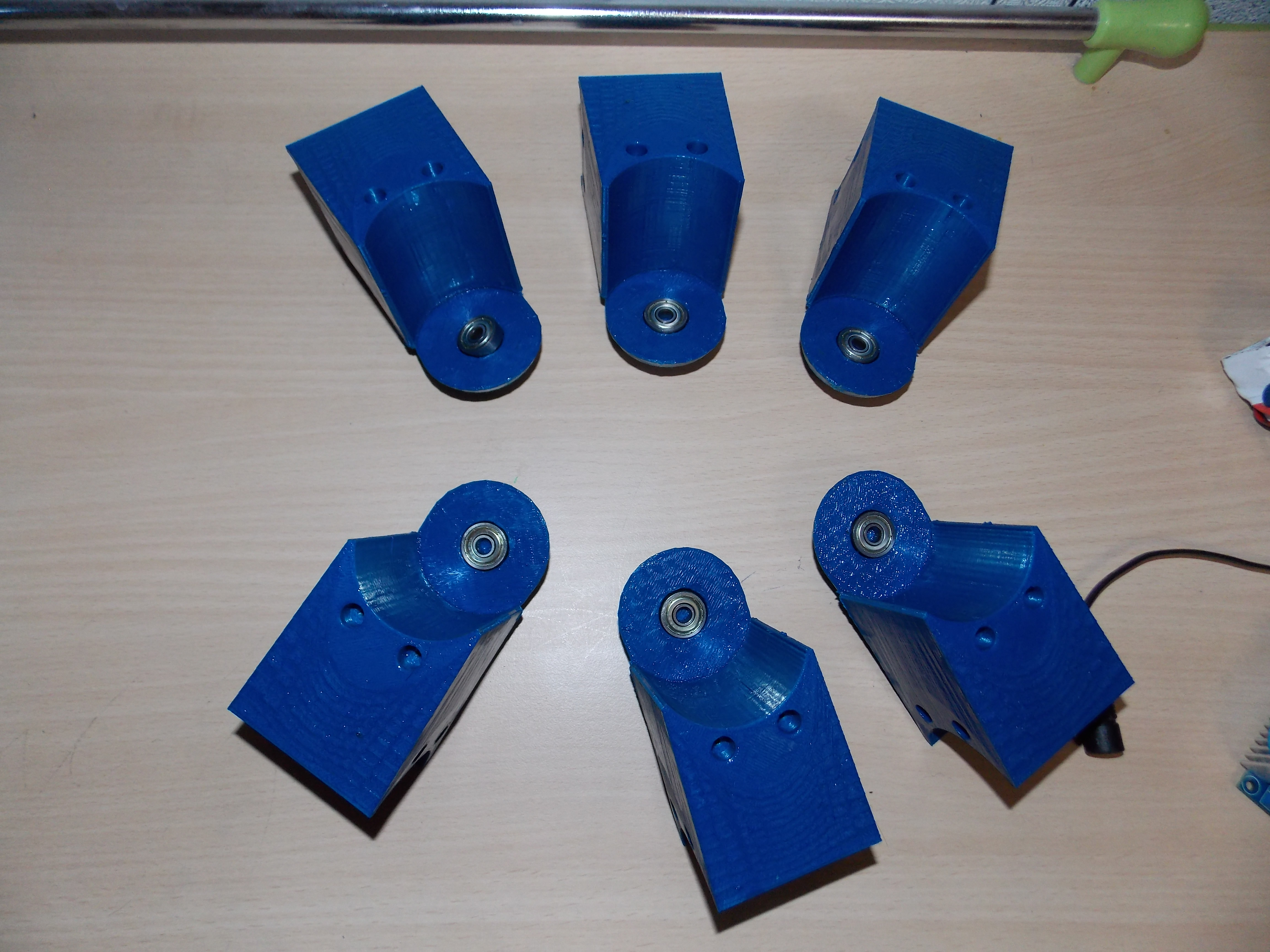
Ao projetar os membros, definimos a tarefa de ocultar ao máximo os servos dentro do gabinete. Em geral, isso era possível, mas, mesmo assim, as alças tinham que ser deixadas do lado de fora para reduzir o impacto mecânico quando as articulações eram dobradas. Com o design, você pode manter a liberdade de movimento das juntas quase na faixa máxima de 0 - 180 graus. Para reduzir o atrito e o desgaste, é fornecido um rolamento em cada junta.

Para a impressão, usamos a Impressora 3D Infintary, que foi comprada no “under heaven” alguns anos atrás. O processo é bastante agradável, por isso demorou mais de um dia para imprimir todo o conjunto de membros.

Durante esse período, fizemos um esboço e construímos um modelo 3D do quadro ao qual os membros devem ser anexados. Ele também hospeda servos das articulações do ombro.

Impressão e montagem
Após a conclusão da impressão, começamos a montar os membros e a montagem final. Em uma versão desmontada, um tipo de construtor resultou:
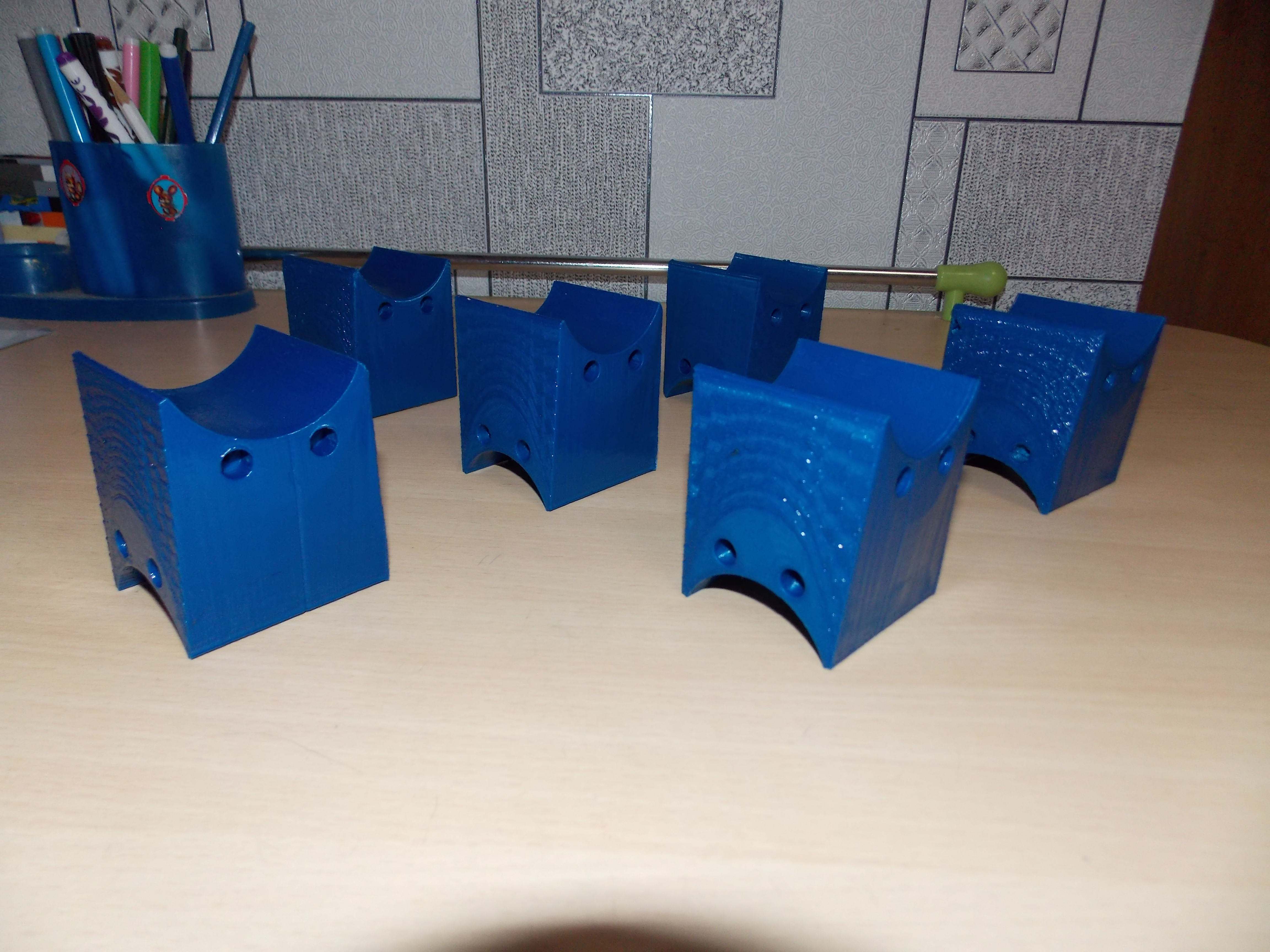



Ao montar, o principal é não esquecer de inserir os rolamentos e a tração dos servos.

Um ponto importante: no momento da montagem, todos os servos devem ser trazidos para a posição intermediária. Para calibrar a posição das articulações dos ombros, imprimimos e subsidiamos um estêncil especial.


Como resultado, obtivemos uma plataforma de seis pernas bastante agradável, cuja revitalização foi ocupada por todo o nosso lazer.

Enchimento eletrônico
A essa altura, o principal conjunto de preenchimento eletrônico para revitalizar o robô já estava compilado e equipado. Inclui componentes prontos, a saber:
- Controlador principal Arduino UNO + WiFi R3 ATmega328P + ESP8266
- Estabilizadores ajustáveis DC / DC Max 9A 300 W - 6 un.
- Baterias de alta corrente HG2 18650 3000 mAh - 3 un.
- Controlador de carregamento BMS 3S 11,1 V 12,6 V 40A
- Escudo Multiservo com 18 servos acionados por barramento I2C.
O uso de componentes prontos para uso afetou negativamente o tamanho do robô. Tivemos que construir uma segunda camada acima da estrutura principal, na qual colocamos estabilizadores e um servo-escudo.

A placa Arduino e o sistema de energia
instalados no telhado estão localizados no terceiro nível do edifício. Planejamos adicionar aqui alguns monitores simulando olhos, microfone, câmera e sensor de distância.

Atualmente, a maioria do trabalho planejado foi concluído. O "Hexa" (como chamamos com o filho do nosso robô) é criado e pode ser controlado via dispositivos telnet ou android através de um aplicativo especialmente escrito.
Posfácio
O quintal já é inverno profundo, os dias estão se tornando mais longos e brilhantes. Isso significa que a primavera e o bom humor estão chegando. Ficaria feliz se minha primeira e, espero, não a última publicação fosse interessante ou útil para alguém. O tópico do artigo foi focado apenas na descrição do processo de criação, para que o preenchimento do software e todo o resto permanecessem nos bastidores. Se estiver interessado, você pode dedicar os seguintes artigos a este tópico. Pronto para responder a todas as perguntas.
Obrigado pela atenção!
Modelo 3D para download