新的神经网络或神经系统模拟
 嗨,极客时间!我想在人工智能领域的研究中展示我的成就。从小我就梦想着创造人工智能的可能性。回到学校后,我读了奇诺维·尤里耶夫(Zinnovy Yuriev)的出色作品《黑夜叉》(Black Yasha),其中的主要角色创造了一种与人脑复杂程度可比的装置,这是一个充满许多相互联系的元素的黑匣子-神经学家,从小就教他,使他沮丧大量的信息。之后,装置变成了一个理性的生物,一个叫做Yasha的人。我想到了神经学家应该如何运作。我在神经系统的神经生物学和生理学中寻找答案。学习有关该主题的书籍使我对生物神经元和I.P.帕夫洛夫(Pavlov)在我心中形成了这样一种信念,即任何关于生物任意复杂行为的表现,条件反射和非条件反射的表现。然后出现了关于生物神经元原理的第一个幼稚假设,并试图系统地描述这些原理。我不知道有人工神经网络这一事实,而互联网却很少。仅在我的学生时代,我就认识了一些有关人工神经网络的文章,对它们的了解给我留下了模糊的印象。一方面,这种作为感知器基础的神经元模型与生物神经元之间的严重差异令人惊讶。另一方面,人工神经网络中使用的描述性方法使我可以重新考虑关于神经元操作的假设,并以更系统化的形式展示它们。尽管即便如此,它们仍然是虚幻的表象。在经典人工网络基础上的神经元模型通常以具有许多输入(树突和一个输出)的轴突的细胞的形式呈现。该细胞分析了来自输入的信号,并像一个函数一样,产生了一个结果,该结果被传输到了下一个神经元。实际上,带有轴突的神经元只是神经系统中的特例,人脑中的大多数神经元都没有轴突。神经元几乎接收整个膜表面的信号,即特殊的受体。之后,它通过突触通过树突将信号传递到其他细胞,此外,细胞的突触具有不同的强度,它们的强度彼此独立地确定。生物神经元具有许多输入和许多独立确定的输出。事实证明,在数学神经元中,分析并计算了输入信号的权重系数在一个生物神经元中,对周末的力量进行了分析。尽管人工网络与生物学网络之间存在很大差异,但事实证明它们非常有效,在这一领域的工作产生了许多有趣且实用的结果。经典的神经网络非常易于实现,我有基于感知器编写简单的Delphi程序的经验,但令我感到羞耻的是,我没有足够的编程技能来实现我对神经系统建模的想法。很长一段时间以来,我都没有讨论这个话题,但是仍然很感兴趣,并且学习了有关神经生物学和心理学的书籍和文章。大约两年前,我开始研究Unity3D游戏引擎,他作为游戏引擎对我很感兴趣。在上面创建了几个游戏应用程序后,我意识到Unity3D最适合提出想法。在这里,可以使用三维空间,并且易于编程,并且可以自由地组织对象的结构。我根据自己的假设,创建一个简单的模型来演示神经元和神经系统的基本王子,这是我的任务。经过一段时间的模型研究,我一直在等待第一次失望。该模型是一种细胞自动机,相互连接的元素。创建的神经元网络(位于立方空间中的三维空间中的约450个细胞)不符合我的想法。尝试纠正她的工作没有成功。三维空间中的位置对于系统来说是非常重要的方面,因为在分析和确定其输出强度时,神经元会考虑其相对于其他活动细胞的位置。
嗨,极客时间!我想在人工智能领域的研究中展示我的成就。从小我就梦想着创造人工智能的可能性。回到学校后,我读了奇诺维·尤里耶夫(Zinnovy Yuriev)的出色作品《黑夜叉》(Black Yasha),其中的主要角色创造了一种与人脑复杂程度可比的装置,这是一个充满许多相互联系的元素的黑匣子-神经学家,从小就教他,使他沮丧大量的信息。之后,装置变成了一个理性的生物,一个叫做Yasha的人。我想到了神经学家应该如何运作。我在神经系统的神经生物学和生理学中寻找答案。学习有关该主题的书籍使我对生物神经元和I.P.帕夫洛夫(Pavlov)在我心中形成了这样一种信念,即任何关于生物任意复杂行为的表现,条件反射和非条件反射的表现。然后出现了关于生物神经元原理的第一个幼稚假设,并试图系统地描述这些原理。我不知道有人工神经网络这一事实,而互联网却很少。仅在我的学生时代,我就认识了一些有关人工神经网络的文章,对它们的了解给我留下了模糊的印象。一方面,这种作为感知器基础的神经元模型与生物神经元之间的严重差异令人惊讶。另一方面,人工神经网络中使用的描述性方法使我可以重新考虑关于神经元操作的假设,并以更系统化的形式展示它们。尽管即便如此,它们仍然是虚幻的表象。在经典人工网络基础上的神经元模型通常以具有许多输入(树突和一个输出)的轴突的细胞的形式呈现。该细胞分析了来自输入的信号,并像一个函数一样,产生了一个结果,该结果被传输到了下一个神经元。实际上,带有轴突的神经元只是神经系统中的特例,人脑中的大多数神经元都没有轴突。神经元几乎接收整个膜表面的信号,即特殊的受体。之后,它通过突触通过树突将信号传递到其他细胞,此外,细胞的突触具有不同的强度,它们的强度彼此独立地确定。生物神经元具有许多输入和许多独立确定的输出。事实证明,在数学神经元中,分析并计算了输入信号的权重系数在一个生物神经元中,对周末的力量进行了分析。尽管人工网络与生物学网络之间存在很大差异,但事实证明它们非常有效,在这一领域的工作产生了许多有趣且实用的结果。经典的神经网络非常易于实现,我有基于感知器编写简单的Delphi程序的经验,但令我感到羞耻的是,我没有足够的编程技能来实现我对神经系统建模的想法。很长一段时间以来,我都没有讨论这个话题,但是仍然很感兴趣,并且学习了有关神经生物学和心理学的书籍和文章。大约两年前,我开始研究Unity3D游戏引擎,他作为游戏引擎对我很感兴趣。在上面创建了几个游戏应用程序后,我意识到Unity3D最适合提出想法。在这里,可以使用三维空间,并且易于编程,并且可以自由地组织对象的结构。我根据自己的假设,创建一个简单的模型来演示神经元和神经系统的基本王子,这是我的任务。经过一段时间的模型研究,我一直在等待第一次失望。该模型是一种细胞自动机,相互连接的元素。创建的神经元网络(位于立方空间中的三维空间中的约450个细胞)不符合我的想法。尝试纠正她的工作没有成功。三维空间中的位置对于系统来说是非常重要的方面,因为在分析和确定其输出强度时,神经元会考虑其相对于其他活动细胞的位置。 第一个失败的神经网络架构考虑到我失败的原因可能是神经元数量和神经元连接数量的预先确定。决定动态创建神经元。事实是,从神经元到神经元有顺序传递激励的原理,每个反射动作都可以表示为神经信号的顺序传递链。在使用计算机资源并在研究网络时干扰评论时,某些神经元无法参与任何反射行为。随着神经元的动态创建,我们可以说程序的工作区域是一个充满假想神经元的空间,必要时将激活它们。该程序在某些需要限制的地方创建神经元,以模仿细胞初步填充的空间。但是,在引入修改之后,使用模型的过程是一个搜索,一个假设循环及其检验。我对神经元脚本进行了更改,观察了一个不符合我期望的系统行为,这迫使我建立新的假设并再次对程序进行更改。这项工作使我高估了某些方面在神经元生物学中的重要性,而这在我看来似乎微不足道。例如,有必要考虑负迹线电位的变化,增加神经元疲劳和抑制细胞。结果,我得到了最初设置自己的结果。该程序可以演示在神经组织中如何进行联合训练,新的反射弧的形成,类似于在I.P.实验中在狗的大脑中进行的训练。帕夫洛娃(俄国常用女名。与经典的神经网络相比,传统的神经网络具有更少的元素可以识别人脸,绘制图片和创作音乐,从功能上来说,我的神经网络几乎没有用。但是,对我来说,其内在的潜力更为重要。系统中有十二个输入,它们是按钮接收器,它们是键盘按钮,它们对应于字母指示的指示符,十二个输出,它们指示某些单元格的活动。该程序允许您编辑网络:创建神经元,配置其突触(通信),配置输入和输出。最初会创建无条件的反射,并在此基础上进行训练。一个人天生就有一套现成的无条件反射,这些反射经过了精心的准备和选择。这组反应决定了我们训练的可变性。在视频中,您可以看到在几次关节重复相关联之后,如何由一个受体和一个运动神经元组成的两个简单的无差异反射。他们之间形成了一个“跳跃者”。我还没有描述有关系统和神经元操作原理的细节,因为理论上的工作仍在进行中,我不想提出原始理论。这仅仅是旅程的开始。还有很多工作要做。现在,我计划开发该程序的新版本,使我能够了解有关神经系统抑制的一些细节。我计划扩展输入信号的功能,更详细和多样化的感觉系统,并考虑到特定的化学信息信号,这些信号将使我们能够模拟情绪的相似度。在对此类模型进行了研究之后,神经元工作的各个方面都将有可能继续进行系统的创建,该系统使您可以像在结构编辑器中一样创建模拟动物大脑工作的系统。在此阶段,也将需要大脑生理学领域的专家知识。如您所知,自我认同和自我意识的能力是智力不可或缺的要素,所有这些都嵌入在大脑的结构中。如果不复制大脑的结构和原理,就不可能创造出思维机器。
人工智能领域的PSResearch以及就该主题撰写文章不是我活动的主要类型,因此请不要严格判断。感谢您在工作,帮助,建议和劝告方面的协助。您的意见和建设性的批评对我来说非常重要。
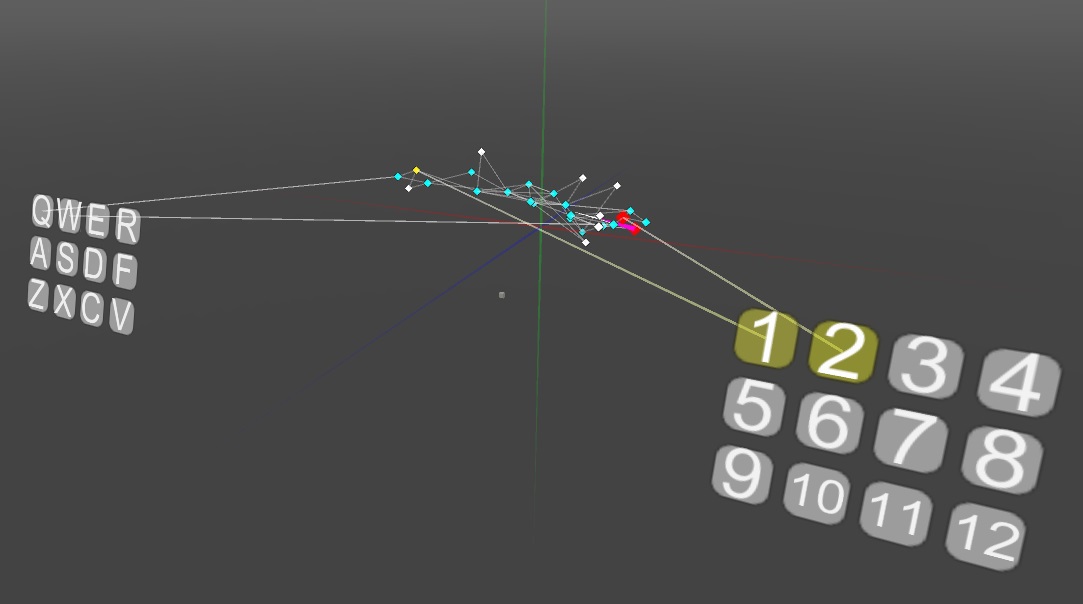
第一个失败的神经网络架构考虑到我失败的原因可能是神经元数量和神经元连接数量的预先确定。决定动态创建神经元。事实是,从神经元到神经元有顺序传递激励的原理,每个反射动作都可以表示为神经信号的顺序传递链。在使用计算机资源并在研究网络时干扰评论时,某些神经元无法参与任何反射行为。随着神经元的动态创建,我们可以说程序的工作区域是一个充满假想神经元的空间,必要时将激活它们。该程序在某些需要限制的地方创建神经元,以模仿细胞初步填充的空间。但是,在引入修改之后,使用模型的过程是一个搜索,一个假设循环及其检验。我对神经元脚本进行了更改,观察了一个不符合我期望的系统行为,这迫使我建立新的假设并再次对程序进行更改。这项工作使我高估了某些方面在神经元生物学中的重要性,而这在我看来似乎微不足道。例如,有必要考虑负迹线电位的变化,增加神经元疲劳和抑制细胞。结果,我得到了最初设置自己的结果。该程序可以演示在神经组织中如何进行联合训练,新的反射弧的形成,类似于在I.P.实验中在狗的大脑中进行的训练。帕夫洛娃(俄国常用女名。与经典的神经网络相比,传统的神经网络具有更少的元素可以识别人脸,绘制图片和创作音乐,从功能上来说,我的神经网络几乎没有用。但是,对我来说,其内在的潜力更为重要。系统中有十二个输入,它们是按钮接收器,它们是键盘按钮,它们对应于字母指示的指示符,十二个输出,它们指示某些单元格的活动。该程序允许您编辑网络:创建神经元,配置其突触(通信),配置输入和输出。最初会创建无条件的反射,并在此基础上进行训练。一个人天生就有一套现成的无条件反射,这些反射经过了精心的准备和选择。这组反应决定了我们训练的可变性。在视频中,您可以看到在几次关节重复相关联之后,如何由一个受体和一个运动神经元组成的两个简单的无差异反射。他们之间形成了一个“跳跃者”。我还没有描述有关系统和神经元操作原理的细节,因为理论上的工作仍在进行中,我不想提出原始理论。这仅仅是旅程的开始。还有很多工作要做。现在,我计划开发该程序的新版本,使我能够了解有关神经系统抑制的一些细节。我计划扩展输入信号的功能,更详细和多样化的感觉系统,并考虑到特定的化学信息信号,这些信号将使我们能够模拟情绪的相似度。在对此类模型进行了研究之后,神经元工作的各个方面都将有可能继续进行系统的创建,该系统使您可以像在结构编辑器中一样创建模拟动物大脑工作的系统。在此阶段,也将需要大脑生理学领域的专家知识。如您所知,自我认同和自我意识的能力是智力不可或缺的要素,所有这些都嵌入在大脑的结构中。如果不复制大脑的结构和原理,就不可能创造出思维机器。
人工智能领域的PSResearch以及就该主题撰写文章不是我活动的主要类型,因此请不要严格判断。感谢您在工作,帮助,建议和劝告方面的协助。您的意见和建设性的批评对我来说非常重要。Source: https://habr.com/ru/post/zh-CN382375/
All Articles