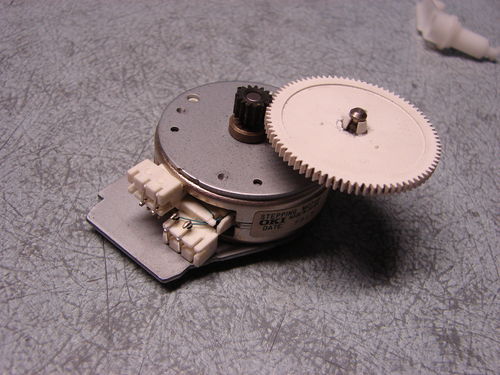
OKI . 48 (7,5 ),
3,7V, 200-250mA

,


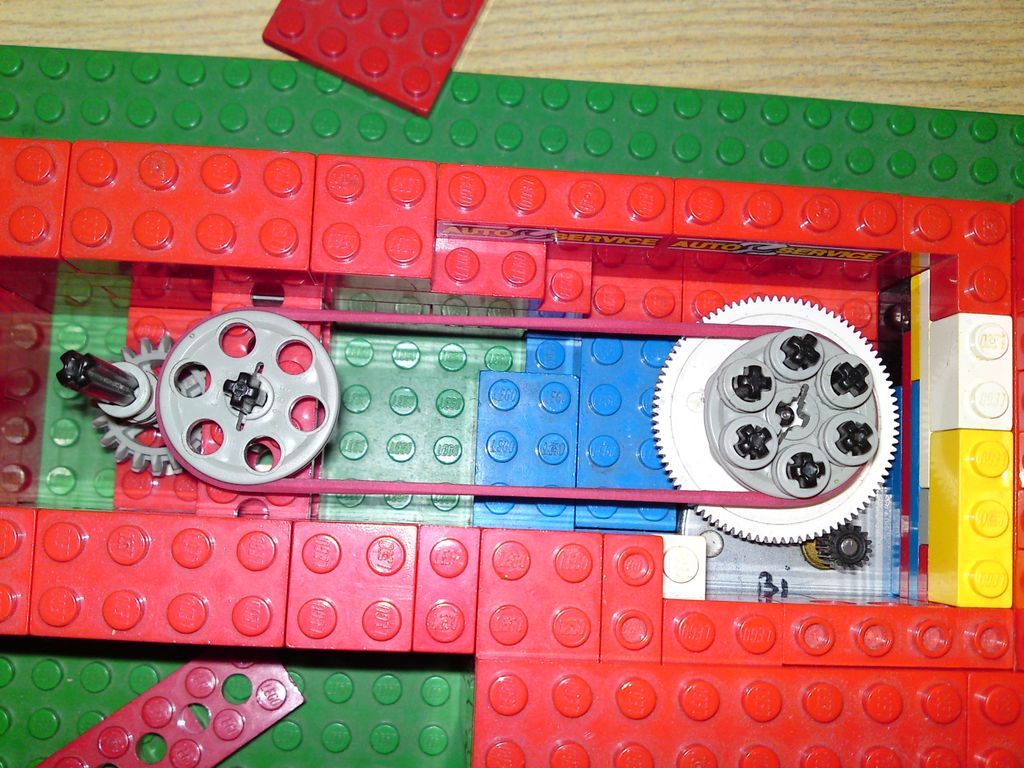
CD, , , LEGO

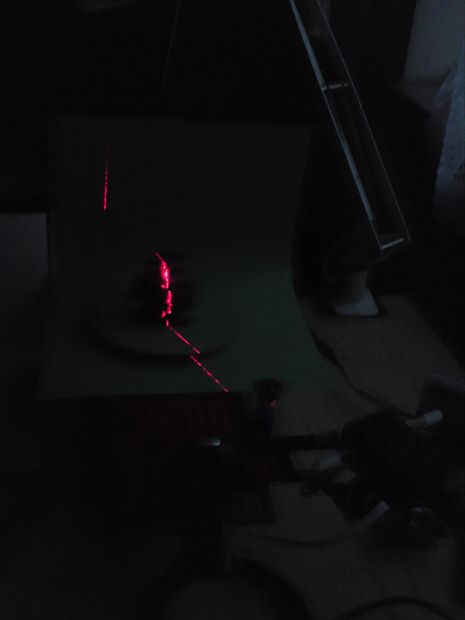
— Creative Webcam Vista. (640x480), (plastic lenses). . .
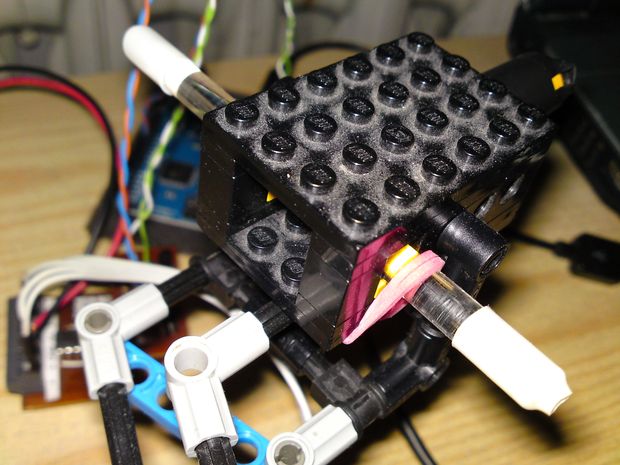
(~1$) , . ( ). 30
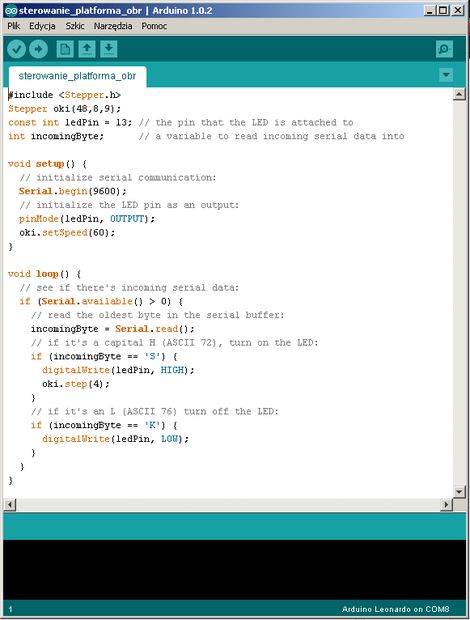
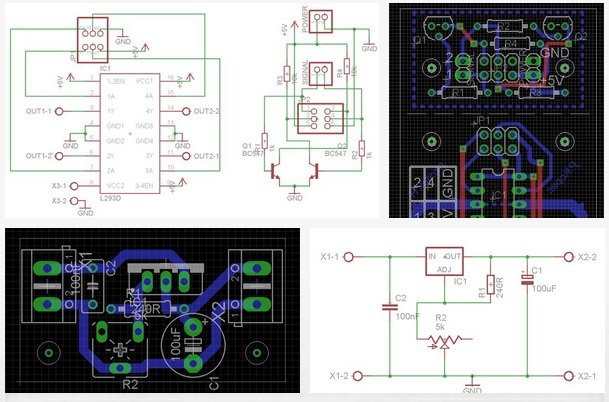
code#include <Stepper.h>
Stepper oki(48,8,9); //see stepper tutorial in arduino.cc for info about that
const int ledPin = 13; // the pin that the LED is attached to
int incomingByte; // a variable to read incoming serial data into
void setup() {
// initialize serial communication:
Serial.begin(9600);
// initialize the LED pin as an output:
pinMode(ledPin, OUTPUT);
oki.setSpeed(60);
}
void loop() {
// see if there's incoming serial data:
if (Serial.available() > 0) {
// read the oldest byte in the serial buffer:
incomingByte = Serial.read();
// if it's a capital H (ASCII 72), turn on the LED:
if (incomingByte == 'S') {
digitalWrite(ledPin, HIGH);
oki.step(4);
}
// if it's an L (ASCII 76) turn off the LED:
if (incomingByte == 'K') {
digitalWrite(ledPin, LOW);
}
}
}
Processingcode:
import codeanticode.gsvideo.*;
import processing.serial.*;
//objects
PFont f;
GSCapture cam;
Serial myPort;
PrintWriter output;
//colors
color black=color(0);
color white=color(255);
//variables
int itr; //iteration
float pixBright;
float maxBright=0;
int maxBrightPos=0;
int prevMaxBrightPos;
int cntr=1;
int row;
int col;
//scanner parameters
float odl = 210; //distance between webcam and turning axle, [milimeter], not used yet
float etap = 120; //number of phases profiling per revolution
float katLaser = 25*PI/180; //angle between laser and camera [radian]
float katOperacji=2*PI/etap; //angle between 2 profiles [radian]
//coordinates
float x, y, z; //cartesian cords., [milimeter]
float ro; //first of polar coordinate, [milimeter]
float fi; //second of polar coordinate, [radian]
float b; //distance between brightest pixel and middle of photo [pixel]
float pxmmpoz = 5; //pixels per milimeter horizontally 1px=0.2mm
float pxmmpion = 5; //pixels per milimeter vertically 1px=0.2mm
//================= CONFIG ===================
void setup() {
size(800, 600);
strokeWeight(1);
smooth();
background(0);
//fonts
f=createFont(«Arial»,16,true);
//camera conf.
String[] avcams=GSCapture.list();
if (avcams.length==0){
println(«There are no cameras available for capture.»);
textFont(f,12);
fill(255,0,0);
text(«Camera not ready»,680,32);
}
else{
println(«Available cameras:»);
for (int i = 0; i < avcams.length; i++) {
println(avcams[i]);
}
textFont(f,12);
fill(0,255,0);
text(«Camera ready»,680,32);
cam=new GSCapture(this, 640, 480,avcams[0]);
cam.start();
}
//Serial (COM) conf.
println(Serial.list());
myPort=new Serial(this, Serial.list()[0], 9600);
//output file
output=createWriter(«skan.asc»); //plik wynikowy *.asc
}
//============== MAIN PROGRAM =================
void draw() {
PImage zdjecie=createImage(cam.width,cam.height,RGB);
cam.read();
delay(2000);
for (itr=0;itr<etap;itr++) {
cam.read();
zdjecie.loadPixels();
cam.loadPixels();
for (int n=0;n<zdjecie.width*zdjecie.height;n++){
zdjecie.pixels[n]=cam.pixels[n];
}
zdjecie.updatePixels();
set(20,20,cam);
String nazwaPliku=«zdjecie-»+nf(itr+1, 3)+".png";
zdjecie.save(nazwaPliku);
obroc();
delay(500);
}
obroc();
licz();
noLoop();
}
void licz(){
for (itr=0; itr<etap; itr++){
String nazwaPliku=«zdjecie-»+nf(itr+1, 3)+".png";
PImage skan=loadImage(nazwaPliku);
String nazwaPliku2=«odzw-»+nf(itr+1, 3)+".png";
PImage odwz=createImage(skan.width, skan.height, RGB);
skan.loadPixels();
odwz.loadPixels();
int currentPos;
fi=itr*katOperacji;
println(fi);
for(row=0; row<skan.height; row++){ //starting row analysis
maxBrightPos=0;
maxBright=0;
for(col=0; col<skan.width; col++){
currentPos = row * skan.width + col;
pixBright=brightness(skan.pixels[currentPos]);
if(pixBright>maxBright){
maxBright=pixBright;
maxBrightPos=currentPos;
}
odwz.pixels[currentPos]=black; //setting all pixels black
}
odwz.pixels[maxBrightPos]=white; //setting brightest pixel white
b=((maxBrightPos+1-row*skan.width)-skan.width/2)/pxmmpoz;
ro=b/sin(katLaser);
//output.println(b + ", " + prevMaxBrightPos + ", " + maxBrightPos); //I used this for debugging
x=ro * cos(fi); //changing polar coords to kartesian
y=ro * sin(fi);
z=row/pxmmpion;
if( (ro>=-30) && (ro<=60) ){ //printing coordinates
output.println(x + "," + y + "," + z);
}
}//end of row analysis
odwz.updatePixels();
odwz.save(nazwaPliku2);
}
output.flush();
output.close();
}
void obroc() { //sending command to turn
myPort.write('S');
delay(50);
myPort.write('K');
}
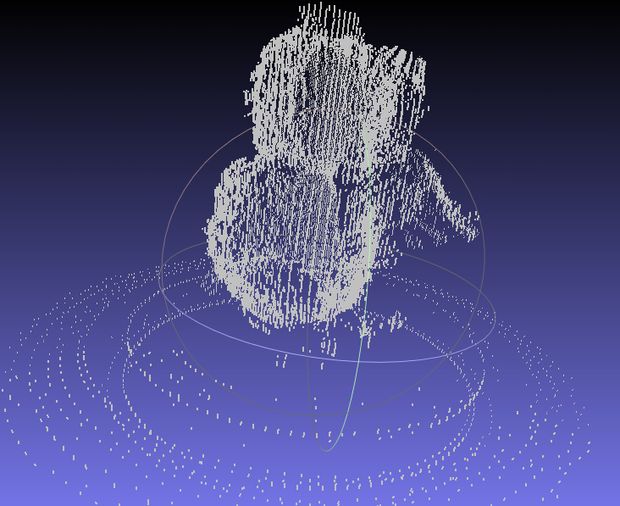


MeshLab