带有ISS的宇航员将控制装有机械手的全地形车
 来自贡品的欧洲宇航员安德烈亚斯·摩根森(Andreas Mogensen)本月初由联盟号火箭运送到国际空间站,今天将在该站上进行独特的互动实验。它将远程控制一个全地形反馈机器人。全地形车将在技术中心ESTEC(欧洲空间研究与技术中心)的机库中驾驶和操纵机械手。这是荷兰主要的技术开发和测试中心,由欧洲航天局ESA拥有。全地形车的测试将分三个阶段进行。首先,宇航员将在半小时内检查与机器人的连接。然后,他将开始控制自己的动作,并检查能够以亚毫米精度工作的机械手的操作。在最后阶段,Mogensen将尝试使用操纵器在准备好的小型工作台孔中布置特殊的钉子。该实验是在ESTEC的框架内,由实验室组织的,用于对机器人和臀部进行远程控制(Telerobotics和Haptics实验室)。 Heptika是一种用于控制配有反馈传感器的远程机器人的技术。这些技术使外科医生可以对患者进行远程操作,专注于组织的返回,例如,宇航员从轨道飞船与位于地球表面的机器人的机械手一起工作。全地形车配备了德国KUKA公司的高精度机械手。他们的机器人在各个行业中工作-他们组装汽车,与成品堆叠托盘,转移玻璃毛坯,在高温下的钢厂工作。全地形车辆操纵器配备了许多反馈传感器-它们能够“轻柔地”操纵各种易碎物体,限制其上的负荷,并适应操作员的手部运动。
来自贡品的欧洲宇航员安德烈亚斯·摩根森(Andreas Mogensen)本月初由联盟号火箭运送到国际空间站,今天将在该站上进行独特的互动实验。它将远程控制一个全地形反馈机器人。全地形车将在技术中心ESTEC(欧洲空间研究与技术中心)的机库中驾驶和操纵机械手。这是荷兰主要的技术开发和测试中心,由欧洲航天局ESA拥有。全地形车的测试将分三个阶段进行。首先,宇航员将在半小时内检查与机器人的连接。然后,他将开始控制自己的动作,并检查能够以亚毫米精度工作的机械手的操作。在最后阶段,Mogensen将尝试使用操纵器在准备好的小型工作台孔中布置特殊的钉子。该实验是在ESTEC的框架内,由实验室组织的,用于对机器人和臀部进行远程控制(Telerobotics和Haptics实验室)。 Heptika是一种用于控制配有反馈传感器的远程机器人的技术。这些技术使外科医生可以对患者进行远程操作,专注于组织的返回,例如,宇航员从轨道飞船与位于地球表面的机器人的机械手一起工作。全地形车配备了德国KUKA公司的高精度机械手。他们的机器人在各个行业中工作-他们组装汽车,与成品堆叠托盘,转移玻璃毛坯,在高温下的钢厂工作。全地形车辆操纵器配备了许多反馈传感器-它们能够“轻柔地”操纵各种易碎物体,限制其上的负荷,并适应操作员的手部运动。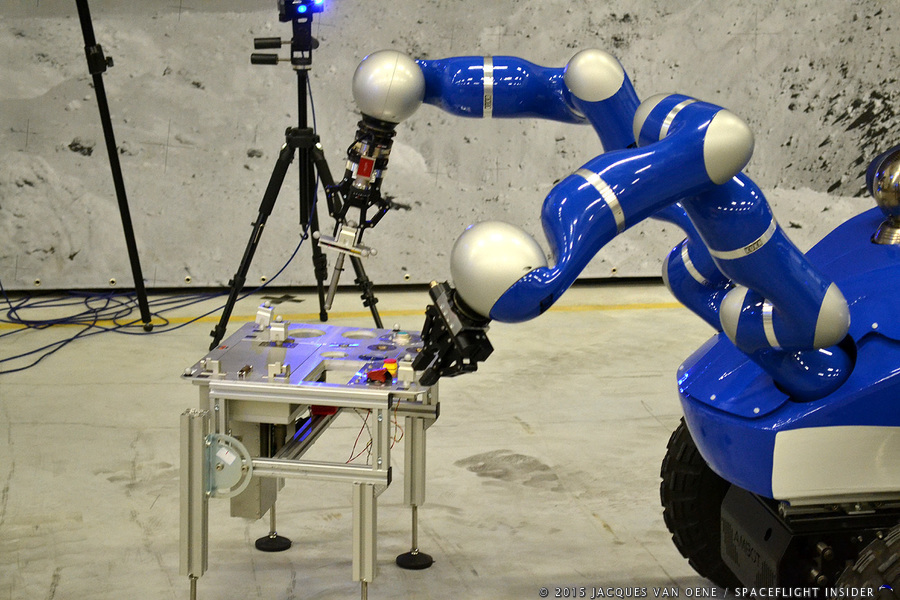 此外,全地形车有四个摄像头。顶部的主摄像头使您可以在太空中导航,其中一个操纵器上的摄像头可精确地处理物体,而前后摄像头可提高移动全地形车时的安全性。不仅要测试全地形车的远程工作,还可以在相邻房间进行。正是从轨道上检查了机器人的控制,以发现与此操作相关的可能的不可预见的困难。另外,在这种情况下,信号将必须走困难的路。它将从国际空间站经过NASA TDRSS卫星系统(用于跟踪和数据传输的卫星系统),然后到达美国的地面站,穿越大西洋并到达荷兰。总的来说,信号路径长度可以是90,000 km,其结果是将发生长达1秒的通信延迟。联盟号TMA-18M飞船成功发射9月2日上午,使用来自Baikonur Cosmodrome的Soyuz-FG运载火箭。船上有丹麦的Andreas Mogensen,哈萨克斯坦的Aydin Aimbetov和俄罗斯的乘务长Sergei Volkov。该航天器接近国际空间站两天,成功地将日本火箭从残骸中躲开,并 于9月4日对接国际空间站。
此外,全地形车有四个摄像头。顶部的主摄像头使您可以在太空中导航,其中一个操纵器上的摄像头可精确地处理物体,而前后摄像头可提高移动全地形车时的安全性。不仅要测试全地形车的远程工作,还可以在相邻房间进行。正是从轨道上检查了机器人的控制,以发现与此操作相关的可能的不可预见的困难。另外,在这种情况下,信号将必须走困难的路。它将从国际空间站经过NASA TDRSS卫星系统(用于跟踪和数据传输的卫星系统),然后到达美国的地面站,穿越大西洋并到达荷兰。总的来说,信号路径长度可以是90,000 km,其结果是将发生长达1秒的通信延迟。联盟号TMA-18M飞船成功发射9月2日上午,使用来自Baikonur Cosmodrome的Soyuz-FG运载火箭。船上有丹麦的Andreas Mogensen,哈萨克斯坦的Aydin Aimbetov和俄罗斯的乘务长Sergei Volkov。该航天器接近国际空间站两天,成功地将日本火箭从残骸中躲开,并 于9月4日对接国际空间站。Source: https://habr.com/ru/post/zh-CN383841/
All Articles