研究人员学会欺骗机器人飞行激光导航
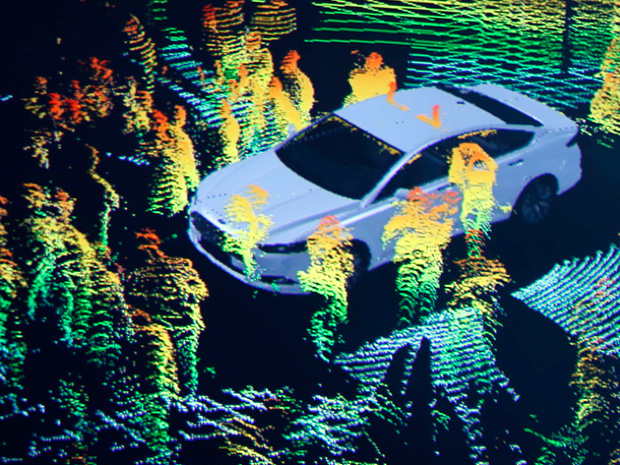 软件安全公司Security Innovation的专家指出了一些机器人汽车开发人员使用的LiDAR激光定向系统中的缺陷。通过使用指针和单板Raspberry Pi计算机制作简单的设备,您可以轻松地欺骗汽车的传感器。该公司的研究人员乔纳森·佩蒂特(Jonathan Petit)辩称,使用该套件,可以再现不存在的汽车发出的信号回波并将其“放置在任何地方”,也就是说,使机器人的导航系统“看到”不存在的障碍。使用此功能,您可以使机器人移动,停止或静止,因为它的计算机会假定它被现实中不存在的物体包围。一些机器人开发人员正在尝试在设计中使用短距离雷达,但是在无线电频率上工作需要许可证。使用激光测距仪非常简单-它发送脉冲并研究反射光。Petit在科克爱尔兰国立大学学习期间做了科学工作,描述了他的工作结构和计划。它将在11月的黑帽欧洲国际安全会议上发表。佩蒂特开始对机器人车辆的安全性研究产生兴趣,并几乎立即得出结论,认为它们最脆弱的地方是激光导航系统。他说:“这是关键-输入所有输入的地方。”如果自动驾驶汽车的输入错误,它将在驾驶时做出错误的决定。欺骗导航系统最困难的部分是准确的计时。当系统等待伪造的响应光束到达时,有必要发送它们。”Petit记录了激光器发出的脉冲,对其进行了分析,并编写了一个发送错误响应脉冲的程序。结果,研究人员能够创建一个系统,该系统成功地模拟了距机器人20至350米远的物体的存在。它甚至可以模仿多个物体的存在,包括移动的物体。要进行攻击,您必须在激光传感器两侧的100米范围内,甚至不必精确地将激光束对准它。现代汽车挤满了旨在简化驾驶员寿命的技术,但同时也具有自身的漏洞。最近,一对黑客展示了远程控制拦截功能装有FCA Uconnect系统(汽车中的互联网)的吉普切诺基汽车系统。根据Petit的说法,新加坡人正在开发一种自动出租车系统,类似于在高尔夫球场上驾驶的汽车。这是不可能太早开始考虑技术安全性的。总是有提高安全性的机会-例如,一个好的系统应该有一种方法可以比较从激光器接收到的数据和其他传感器的数据,并消除出现的不一致性。而且,机器人汽车的开发人员应该已经开始朝这个方向思考-因为在他们手中,不仅是特定计算机系统的安全性,还在于人类的生命和健康。
软件安全公司Security Innovation的专家指出了一些机器人汽车开发人员使用的LiDAR激光定向系统中的缺陷。通过使用指针和单板Raspberry Pi计算机制作简单的设备,您可以轻松地欺骗汽车的传感器。该公司的研究人员乔纳森·佩蒂特(Jonathan Petit)辩称,使用该套件,可以再现不存在的汽车发出的信号回波并将其“放置在任何地方”,也就是说,使机器人的导航系统“看到”不存在的障碍。使用此功能,您可以使机器人移动,停止或静止,因为它的计算机会假定它被现实中不存在的物体包围。一些机器人开发人员正在尝试在设计中使用短距离雷达,但是在无线电频率上工作需要许可证。使用激光测距仪非常简单-它发送脉冲并研究反射光。Petit在科克爱尔兰国立大学学习期间做了科学工作,描述了他的工作结构和计划。它将在11月的黑帽欧洲国际安全会议上发表。佩蒂特开始对机器人车辆的安全性研究产生兴趣,并几乎立即得出结论,认为它们最脆弱的地方是激光导航系统。他说:“这是关键-输入所有输入的地方。”如果自动驾驶汽车的输入错误,它将在驾驶时做出错误的决定。欺骗导航系统最困难的部分是准确的计时。当系统等待伪造的响应光束到达时,有必要发送它们。”Petit记录了激光器发出的脉冲,对其进行了分析,并编写了一个发送错误响应脉冲的程序。结果,研究人员能够创建一个系统,该系统成功地模拟了距机器人20至350米远的物体的存在。它甚至可以模仿多个物体的存在,包括移动的物体。要进行攻击,您必须在激光传感器两侧的100米范围内,甚至不必精确地将激光束对准它。现代汽车挤满了旨在简化驾驶员寿命的技术,但同时也具有自身的漏洞。最近,一对黑客展示了远程控制拦截功能装有FCA Uconnect系统(汽车中的互联网)的吉普切诺基汽车系统。根据Petit的说法,新加坡人正在开发一种自动出租车系统,类似于在高尔夫球场上驾驶的汽车。这是不可能太早开始考虑技术安全性的。总是有提高安全性的机会-例如,一个好的系统应该有一种方法可以比较从激光器接收到的数据和其他传感器的数据,并消除出现的不一致性。而且,机器人汽车的开发人员应该已经开始朝这个方向思考-因为在他们手中,不仅是特定计算机系统的安全性,还在于人类的生命和健康。Source: https://habr.com/ru/post/zh-CN383945/
All Articles