要制造一种包含气压计,温度计,湿度计或全部装在一个瓶子中,由220V供电的无线传感器不是问题。但是,用电池或蓄电池为这种设备供电已经很有趣了。好吧,如果它是碟形锂电池(平板电脑)-通常会很凉爽,因为该设备会变得非常紧凑。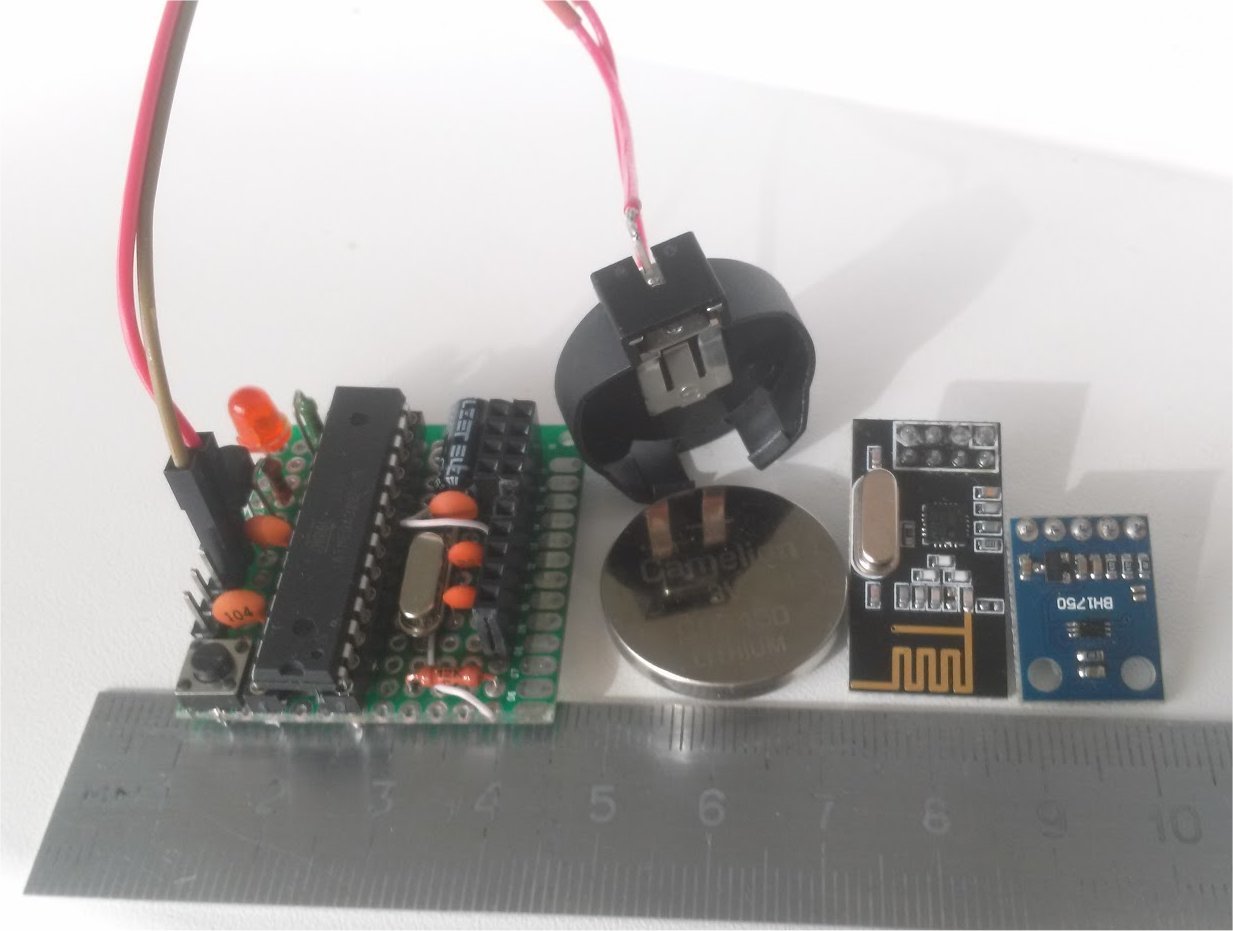 使用“药丸”的唯一障碍是其容量小。但即使在“平板电脑”中,也有相当合适的标本,例如CR2450,标称容量为550-610 mAh。由于在制造该设备时,我已经有现成的室内和室外温度和湿度传感器,因此我决定基于BH1750制作照明传感器并将其放置在阳台上,并为其配备DS18B20温度传感器。由于我的所有窗户都朝南,因此室外温度和湿度传感器会受到阳光的严重影响,因此必须通过从Internet接收的天气数据来补偿这种影响,将来,我计划使用有关照明水平的信息来计算补偿。为了最大程度地减少传感器消耗的能量,决定:1.拒绝使用成品的Arduinki,而直接将ATmega 328P-PU微控制器与8MHz石英一起使用。我拒绝使用内部RC生成器,因为由于外部温度的显着变化,工作频率不稳定。2.使用LowPower库并为控制器启用LowPower.powerDown省电模式(SLEEP_8S,ADC_OFF,BOD_OFF)。3.在测量之前,立即从微控制器的数字输出为DS18B20传感器供电并打开DS18B20传感器的电源。4.分别使用节能模式radio.powerDown()和Light.configure(BH1750_ONE_TIME_HIGH_RES_MODE)直接给无线电模块和BH1750供电。配备了USBasp编程器,
使用“药丸”的唯一障碍是其容量小。但即使在“平板电脑”中,也有相当合适的标本,例如CR2450,标称容量为550-610 mAh。由于在制造该设备时,我已经有现成的室内和室外温度和湿度传感器,因此我决定基于BH1750制作照明传感器并将其放置在阳台上,并为其配备DS18B20温度传感器。由于我的所有窗户都朝南,因此室外温度和湿度传感器会受到阳光的严重影响,因此必须通过从Internet接收的天气数据来补偿这种影响,将来,我计划使用有关照明水平的信息来计算补偿。为了最大程度地减少传感器消耗的能量,决定:1.拒绝使用成品的Arduinki,而直接将ATmega 328P-PU微控制器与8MHz石英一起使用。我拒绝使用内部RC生成器,因为由于外部温度的显着变化,工作频率不稳定。2.使用LowPower库并为控制器启用LowPower.powerDown省电模式(SLEEP_8S,ADC_OFF,BOD_OFF)。3.在测量之前,立即从微控制器的数字输出为DS18B20传感器供电并打开DS18B20传感器的电源。4.分别使用节能模式radio.powerDown()和Light.configure(BH1750_ONE_TIME_HIGH_RES_MODE)直接给无线电模块和BH1750供电。配备了USBasp编程器,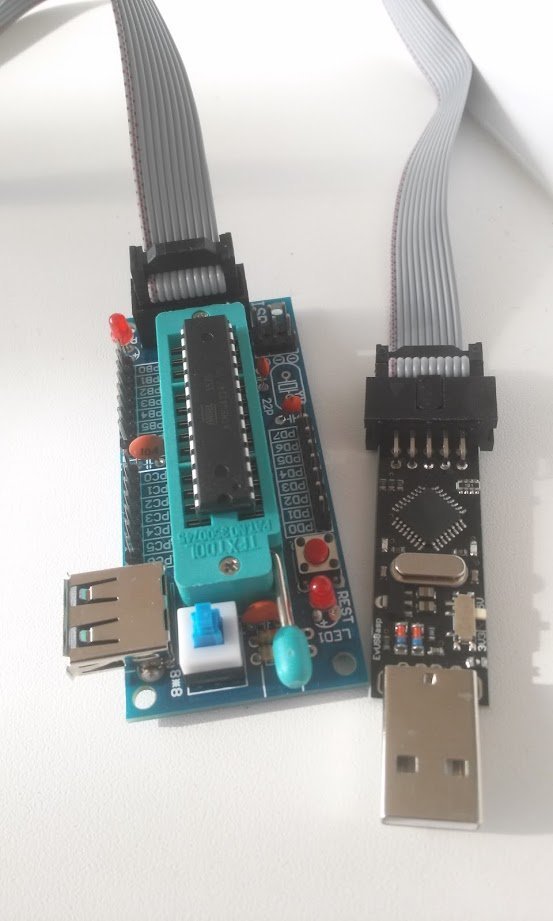 我要求控制器和引导加载程序提供保险丝。我组装了一个原型,绘制了测试草图并测量了消耗的电流:在睡眠模式下,电流为14μA,在从传感器获取读数的模式下为3-4 mA,在通过nRF24传输到气象站的数据模式为16-18 mA。考虑到我决定每3分钟从传感器读取一次读数,然后每10分钟发送一次读数,因此该传感器非常经济。为了制造最终设备,使用了一块面包板和金属丝MGTF。结果就是发生了什么:
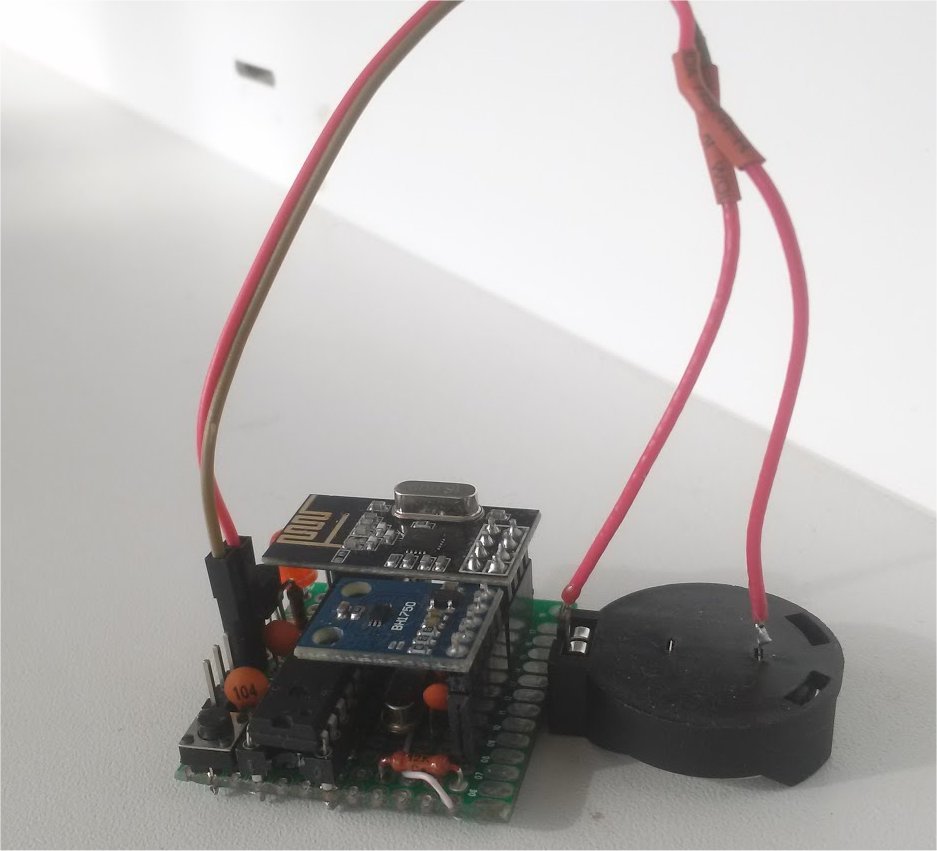
我要求控制器和引导加载程序提供保险丝。我组装了一个原型,绘制了测试草图并测量了消耗的电流:在睡眠模式下,电流为14μA,在从传感器获取读数的模式下为3-4 mA,在通过nRF24传输到气象站的数据模式为16-18 mA。考虑到我决定每3分钟从传感器读取一次读数,然后每10分钟发送一次读数,因此该传感器非常经济。为了制造最终设备,使用了一块面包板和金属丝MGTF。结果就是发生了什么: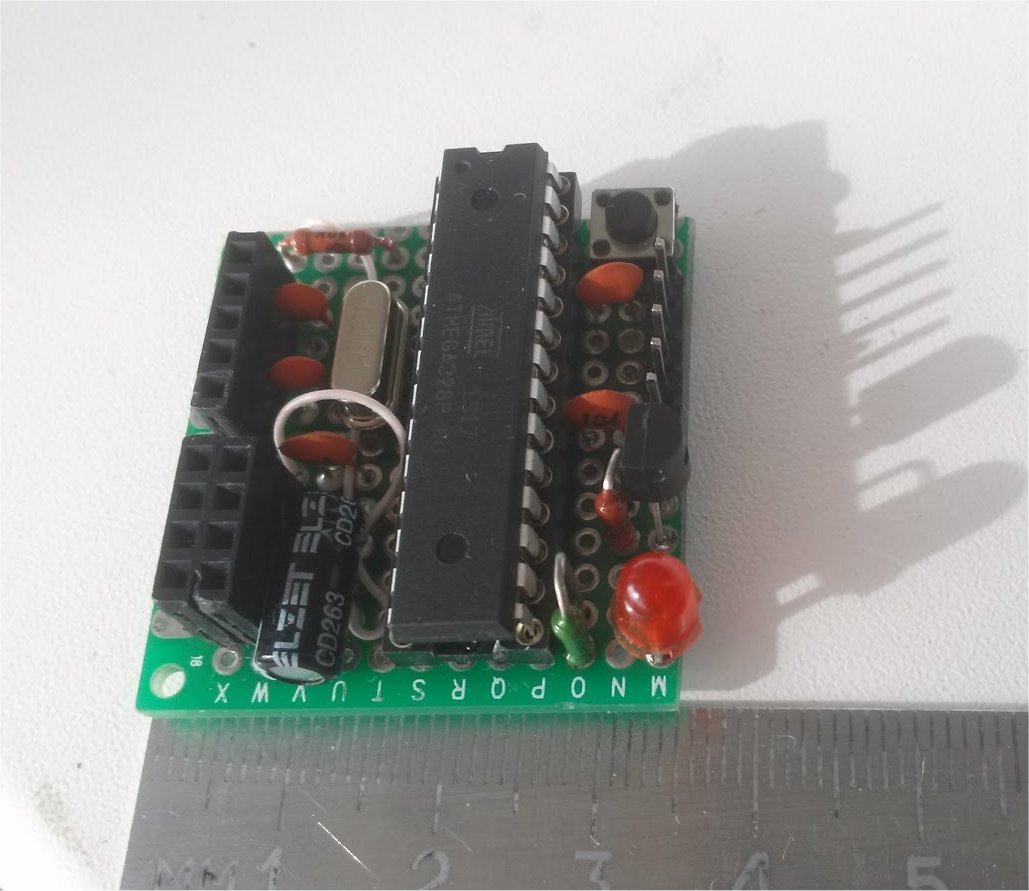 为了监视电池状态,我们使用了ATmega的内置功能,本文对此进行了详细介绍。引导加载程序和保险丝的刷新过程在此处 和此处详细介绍。在疯子网站上
借用了创建自主传感器的一般想法。传感器已经第二个月躺在窗台的阳台上(并且正在工作),可以正确发送数据。电源控制报告说,在此期间,电源电压从首次打开时的3.05V下降到2.98V。但是,白天,当阳光温暖阳台时,电压可能会上升到3.00V。我期待寒冷的天气,让我们看看所选电池在低温下如何显示自己。在选定的睡眠模式持续时间下,事实证明传感器在24小时内仅唤醒492-495秒。该设备是完整的,但不幸的是到目前为止没有外壳,我找不到合适的
为了监视电池状态,我们使用了ATmega的内置功能,本文对此进行了详细介绍。引导加载程序和保险丝的刷新过程在此处 和此处详细介绍。在疯子网站上
借用了创建自主传感器的一般想法。传感器已经第二个月躺在窗台的阳台上(并且正在工作),可以正确发送数据。电源控制报告说,在此期间,电源电压从首次打开时的3.05V下降到2.98V。但是,白天,当阳光温暖阳台时,电压可能会上升到3.00V。我期待寒冷的天气,让我们看看所选电池在低温下如何显示自己。在选定的睡眠模式持续时间下,事实证明传感器在24小时内仅唤醒492-495秒。该设备是完整的,但不幸的是到目前为止没有外壳,我找不到合适的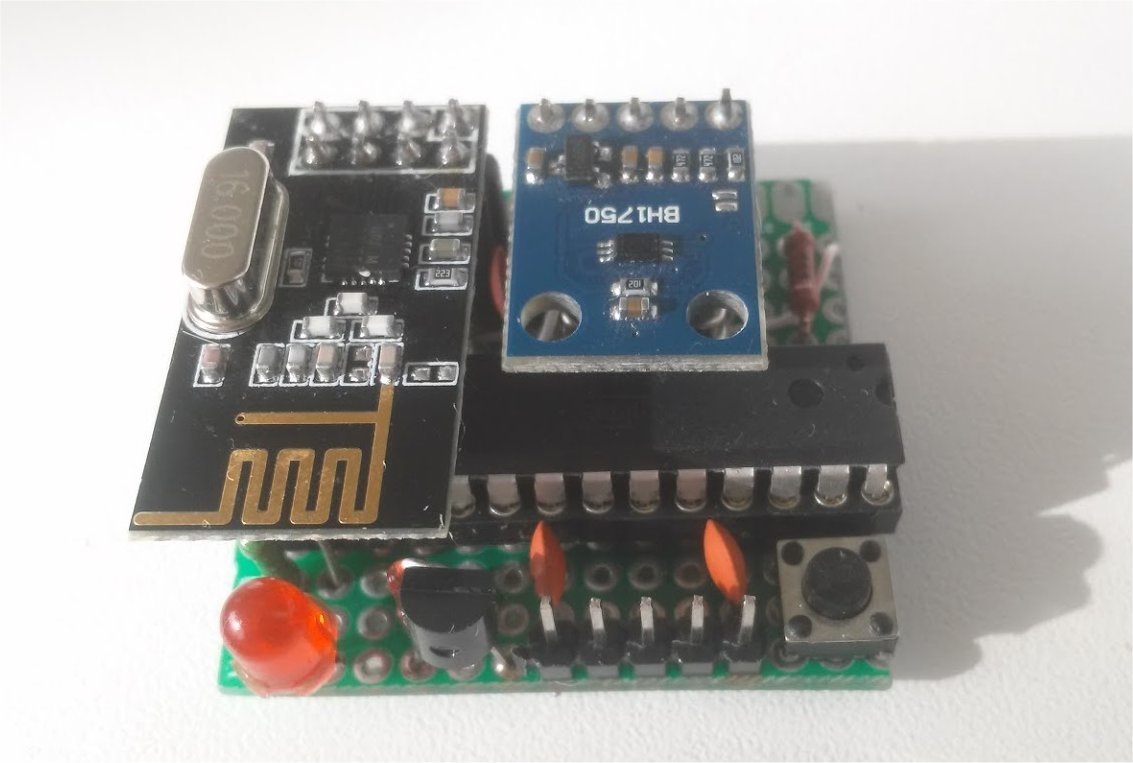
增加了03/20/2016。6 , . -24, 2,5280V.
( ) 4 + .
资源#include <LowPower.h>
#include <SPI.h>
#include <RF24Network.h>
#include <RF24.h>
#include <OneWire.h>
#include <DallasTemperature.h>
#include <Wire.h>
#include <BH1750.h>
class AVG {
#define DEPTH_AVG 10
private :
int depth;
long *mas;
int cur;
boolean first;
public :
boolean fDebug;
AVG(int d)
{
if( d == 0 || d > DEPTH_AVG)depth = DEPTH_AVG;
else depth = d;
mas = (long *)malloc(sizeof(long)*depth);
first = true;
cur = 0;
fDebug = false;
}
void Set(long x)
{
if( first )
{
for( int i=0; i<depth; i++ )mas[i] = x;
cur = 0;
}
else
{
mas[cur++] = x;
if( cur >= depth ) cur = 0;
}
first = false;
}
long Get()
{
long x=0;
for( int i=0; i<depth; i++ )
{
x+=mas[i];
}
x/=depth;
return(x);
}
};
#define pinPowerSensor 4
#define ONE_WIRE_BUS 3
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature sensors(&oneWire);
BH1750 Light;
RF24 radio( 9, 10);
RF24Network network(radio);
uint16_t this_node = 02;
uint16_t main_node = 0;
const int Chanel = 11;
int ReadCount;
int iSend = 3;
int WaitCount = 24;
bool allowSend = false;
AVG vAVG(3);
AVG tAVG(3);
AVG lAVG(3);
struct StreetMeteoSensor
{
char ID[5];
unsigned long UpTime;
int T;
long L;
int V;
};
struct StreetMeteoSensor sensor;
RF24NetworkHeader header(main_node, 'I');
#define DEBUG_MODE 0
void setup(void)
{
if (DEBUG_MODE)
{
Serial.begin(115200);
Serial.println("-- START --");
WaitCount = 5;
}
for (int i = 1; i < 15; i++)
{
pinMode(i, OUTPUT);
digitalWrite(i,LOW);
}
digitalWrite(pinPowerSensor,HIGH);
char ID[5] = "LTS1";
memcpy(sensor.ID, ID, 5);
ReadCount = iSend;
SPI.begin();
delay(500);
radio.begin();
network.begin( Chanel, this_node );
sensors.begin();
Light.begin(BH1750_ONE_TIME_HIGH_RES_MODE);
delay(500);
radio.powerDown();
digitalWrite(pinPowerSensor,LOW);
Light.configure(BH1750_POWER_DOWN);
if (DEBUG_MODE) Serial.println("-- End SETUP --");
}
void loop(void)
{
if (DEBUG_MODE) Serial.println("data read...");
Light.configure(BH1750_POWER_ON);
Light.configure(BH1750_ONE_TIME_HIGH_RES_MODE);
digitalWrite(pinPowerSensor,HIGH);
sensors.setResolution(TEMP_9_BIT);
delay(250);
sensors.requestTemperatures();
int T = sensors.getTempCByIndex(0);
digitalWrite(pinPowerSensor,LOW);
long L = Light.readLightLevel();
int V = readVcc();
int tt = tAVG.Get();
int vv = vAVG.Get();
long ll = lAVG.Get();
if (L > 0 || ll > 0 || T < tt-2 || T > tt+2 || V < vv-100)
{
tAVG.Set(T);
lAVG.Set(L);
vAVG.Set(V);
allowSend = true;
if (ll == 0 && L > 0)
lAVG.Set(L);
}
ReadCount++;
if (DEBUG_MODE)
{
Serial.print("T= ");
Serial.print(tAVG.Get());
Serial.print(": ");
Serial.print(T);
Serial.print("; L= ");
Serial.print(lAVG.Get());
Serial.print(": ");
Serial.print(L);
Serial.print("; V= ");
Serial.print(vAVG.Get());
Serial.print(": ");
Serial.print(V);
Serial.print("; ReadCount= ");
Serial.println(ReadCount);
}
if ( ReadCount >= iSend && allowSend )
{
ReadCount = 0;
allowSend = false;
radio.powerUp();
delay(50);
sensor.T = tAVG.Get();
sensor.L = lAVG.Get();
sensor.V = vAVG.Get();
sensor.UpTime = millis()/1000;
network.write(header,&sensor,sizeof(sensor));
radio.powerDown();
}
sleep();
}
void sleep()
{
if (DEBUG_MODE) {Serial.println("----- SLEEP -----");Serial.flush();}
for (int i = 0; i < WaitCount; i++)
{
LowPower.powerDown(SLEEP_8S, ADC_OFF, BOD_OFF);
}
}
int readVcc()
{
int result;
ADMUX = _BV(REFS0) | _BV(MUX3) | _BV(MUX2) | _BV(MUX1);
delay(75);
ADCSRA |= _BV(ADSC);
while (bit_is_set(ADCSRA,ADSC));
result = ADCL;
result |= ADCH<<8;
if (DEBUG_MODE) {Serial.print("result=");Serial.println(result);}
result = 1125300L / result;
return result;
}