 今年,我们参加了CanSat天气探测器发射冠军赛,并设定了一个雄心勃勃的目标:在不违反比赛规则的情况下,将探测器变成完整的无人机
今年,我们参加了CanSat天气探测器发射冠军赛,并设定了一个雄心勃勃的目标:在不违反比赛规则的情况下,将探测器变成完整的无人机这篇文章包括:
1)设备说明2)创建目的3)组装过程4)飞行测试5)最后启动描述
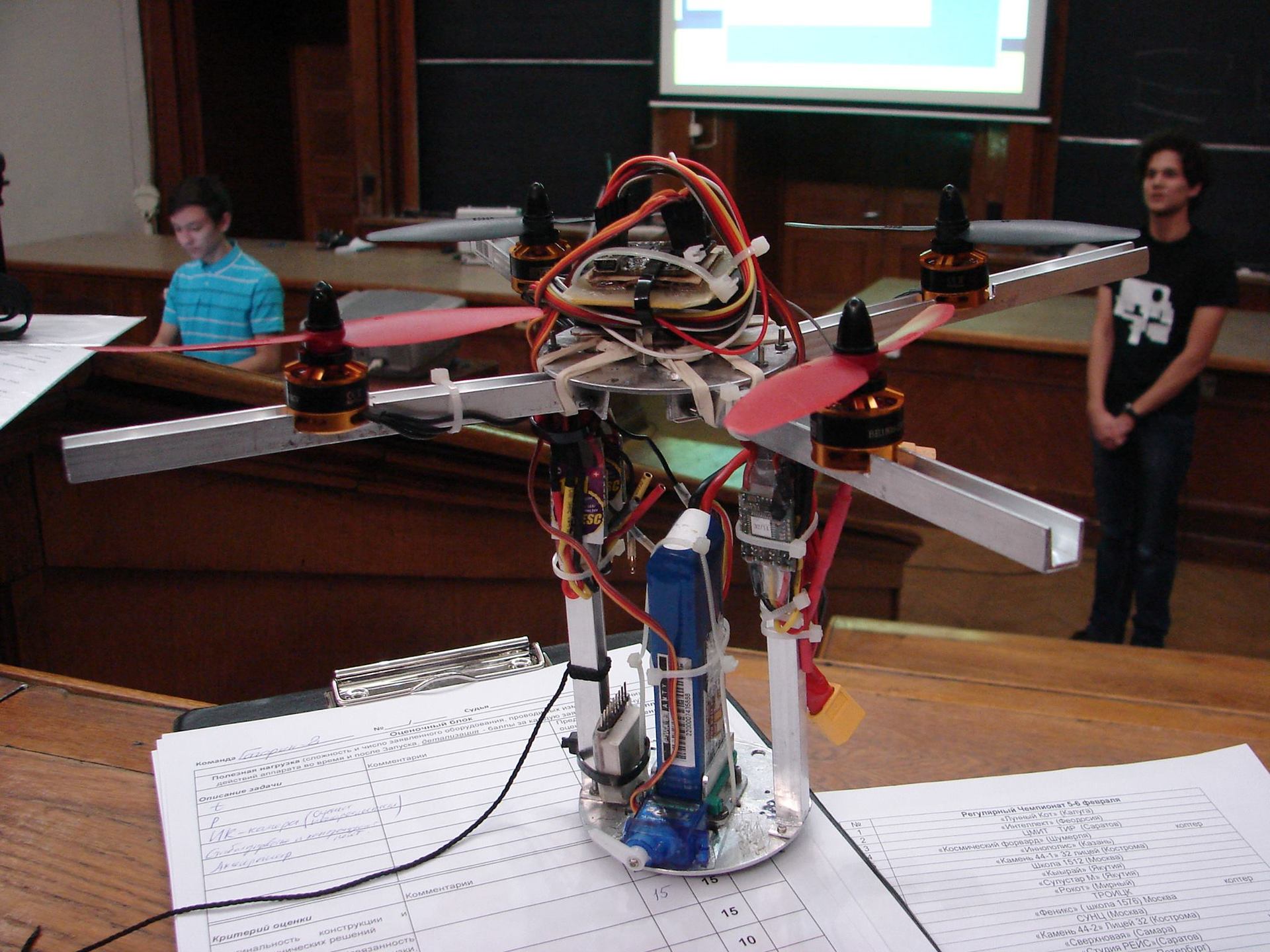
该设备是一种具有两种模式的直升机:在被动模式下,它采取圆柱体的形式,放置在火箭体内,在打开主动射线的情况下,启动发动机,开始执行主要任务,包括收集有关地球表面和大气状况的数据,根据设定点(具有拦截飞行员控制的能力)并返回基准点。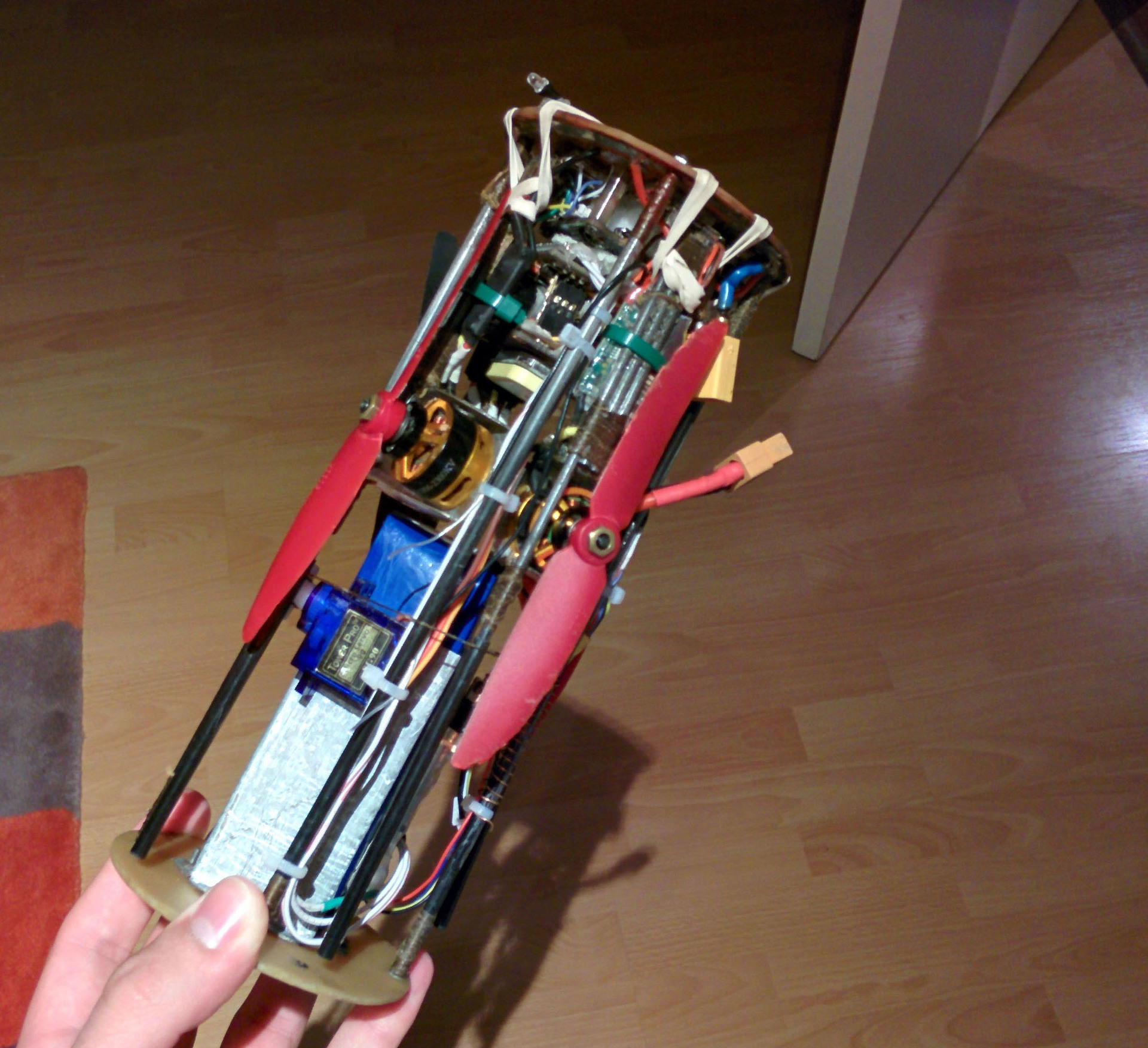 折叠状态
折叠状态特点:
飞行时间:6-12分钟水平飞行范围:4 km垂直飞行范围:2 km主动模式转换时间:3秒重量:600 g安装的传感器:气压计,加速计,陀螺仪,磁力计,GPS,红外摄像机该项目已创建参加由SINP MSU举办的CanSat冠军大联盟。什么是堪萨特, . («»), , .
— , 1-4 , , . .
, , . , , . .
3 :
— 0.5 , 350 , , , , ATmega 128, RXQ2 (433 ). 500.
— , . : 200, . 1 .
— (30 ) .
我的球队有参加冠军的经验:去年我们参加了常规联赛。而不是现成的设计师,而是决定自己制作,同时保留基本集中的基本组件,以使实际上并未违反规则,但我们通知了组织者。由于使用了双面印刷,我们设法将板子的尺寸减小了3倍,因此从理论上讲我们可以参加美国锦标赛,但是由于自家生产,板子的工作有些中断,这使我们无法在火箭上发射。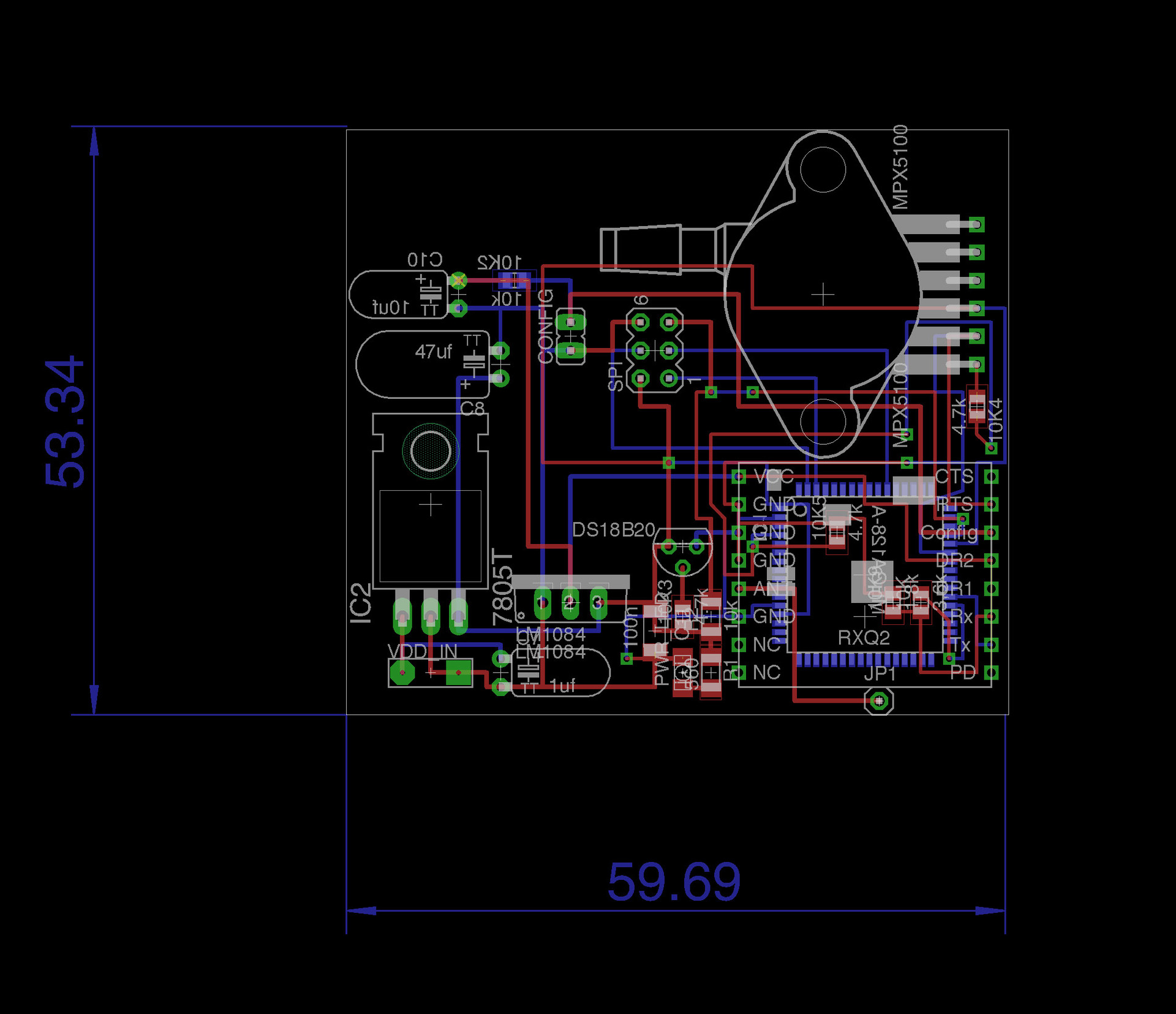 主电路板我们的附加任务是使用16x4像素摄像机在红外范围内射击地球,并在可见范围内进行进一步覆盖。如实践所示,该项目无论如何都是无用的,因为由于降落伞掉落而使探头一直在摇晃,光圈速度和拍摄速度不足,所以所有视频都是模糊的。
主电路板我们的附加任务是使用16x4像素摄像机在红外范围内射击地球,并在可见范围内进行进一步覆盖。如实践所示,该项目无论如何都是无用的,因为由于降落伞掉落而使探头一直在摇晃,光圈速度和拍摄速度不足,所以所有视频都是模糊的。这样的视频的例子
( 0:35)
. 2-
关于我们所有人如何破裂的更多细节1) - , .
2) , - , . , .
3) 18 / .
4) , , .
, 4 , .
还值得一提的是,更老的球队参加了更早的冠军赛。去年他们参加了大联盟。主要功能是使用叶轮而不是降落伞,但是由于程序代码和临时安装板不可用,它们也无法执行。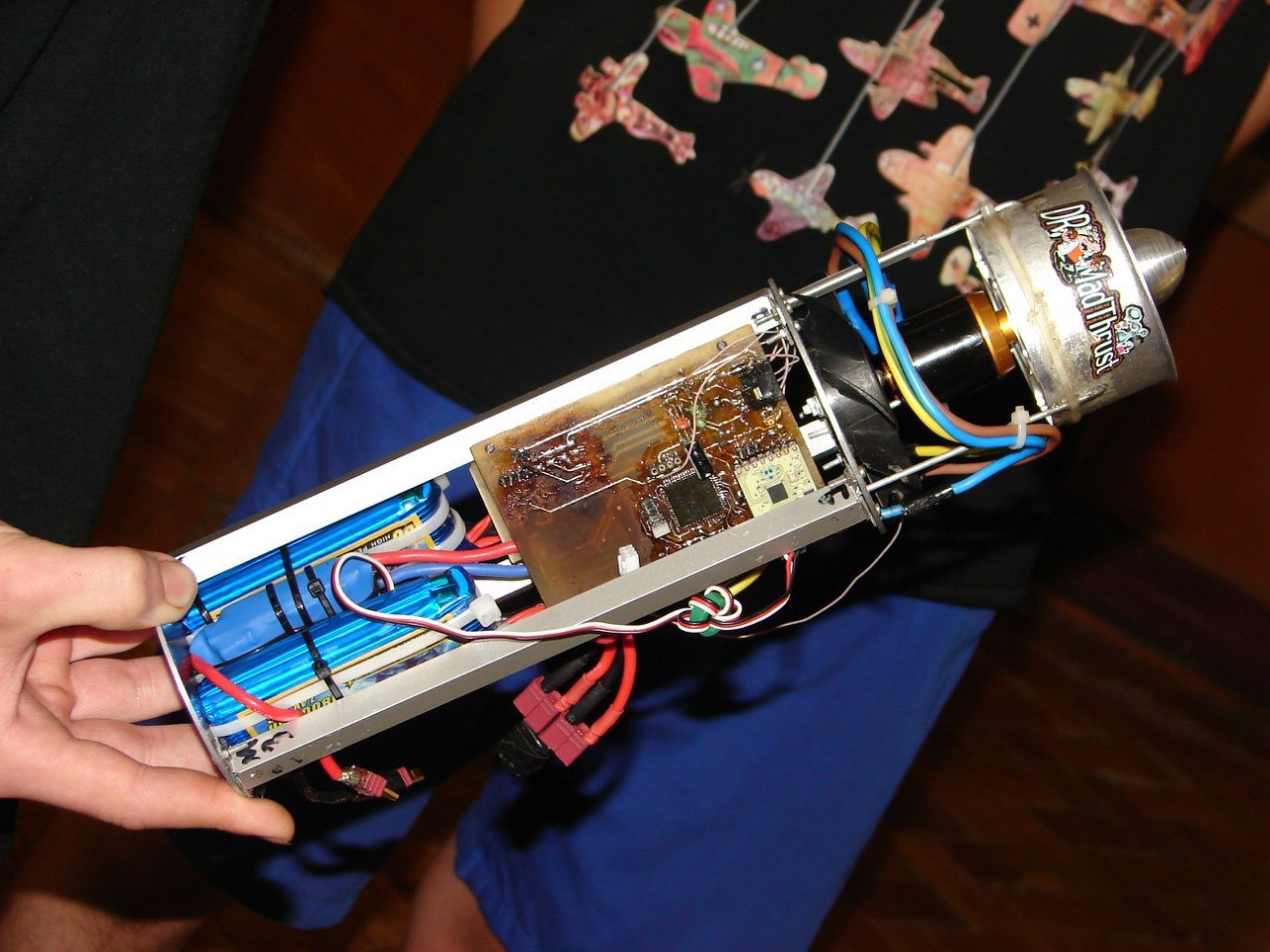 叶轮探针
叶轮探针他们的故事
, , . , GPS GSM .
. , .
, , .
今年,决定合并该团队。结果,我的团队决定发展一种受控下降的想法,即制造一种适合火箭飞行的直升机。创建过程
 原型我们在冬季会议前一周制作了第一个原型,以使陪审团确信该项目的现实。框架也由铝和梁制成。作为飞行控制器,我使用了MultiWii,因此该原型只能在操作员的命令下显示光线,并以手动模式飞行。
原型我们在冬季会议前一周制作了第一个原型,以使陪审团确信该项目的现实。框架也由铝和梁制成。作为飞行控制器,我使用了MultiWii,因此该原型只能在操作员的命令下显示光线,并以手动模式飞行。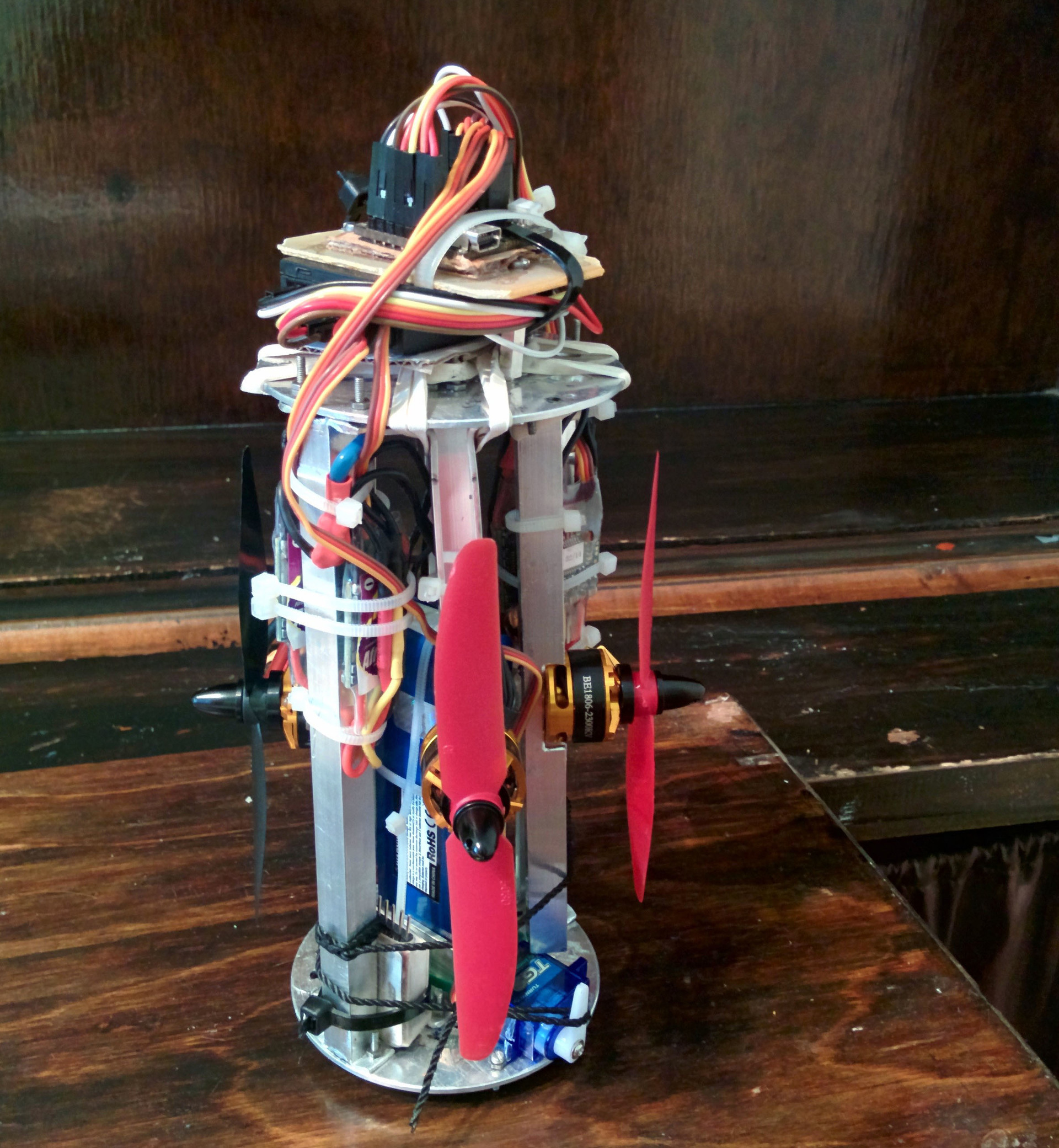 评审团对这个项目表示赞赏,我们获得了第一名,现在我们可以开始组装了。顺便说一句,在试飞之前,我们的发动机已经烧坏了,我们将其更换为备用发动机。在演示过程中,发动机再次烧毁。两者都连接到相同的速度控制器,我们不再使用它。不幸的是,资金来源消失了,它似乎更接近通过考试,在这里我无法参加。结果,在通过考试后,我们紧急订购了快递所需的零件,并用碳管,凯夫拉尔线和环氧树脂武装起来,开始组装框架和横梁。在整个两周的时间里,我们没有时间的想法并没有离开我,但是火车票已经买了,没有回头路了。
评审团对这个项目表示赞赏,我们获得了第一名,现在我们可以开始组装了。顺便说一句,在试飞之前,我们的发动机已经烧坏了,我们将其更换为备用发动机。在演示过程中,发动机再次烧毁。两者都连接到相同的速度控制器,我们不再使用它。不幸的是,资金来源消失了,它似乎更接近通过考试,在这里我无法参加。结果,在通过考试后,我们紧急订购了快递所需的零件,并用碳管,凯夫拉尔线和环氧树脂武装起来,开始组装框架和横梁。在整个两周的时间里,我们没有时间的想法并没有离开我,但是火车票已经买了,没有回头路了。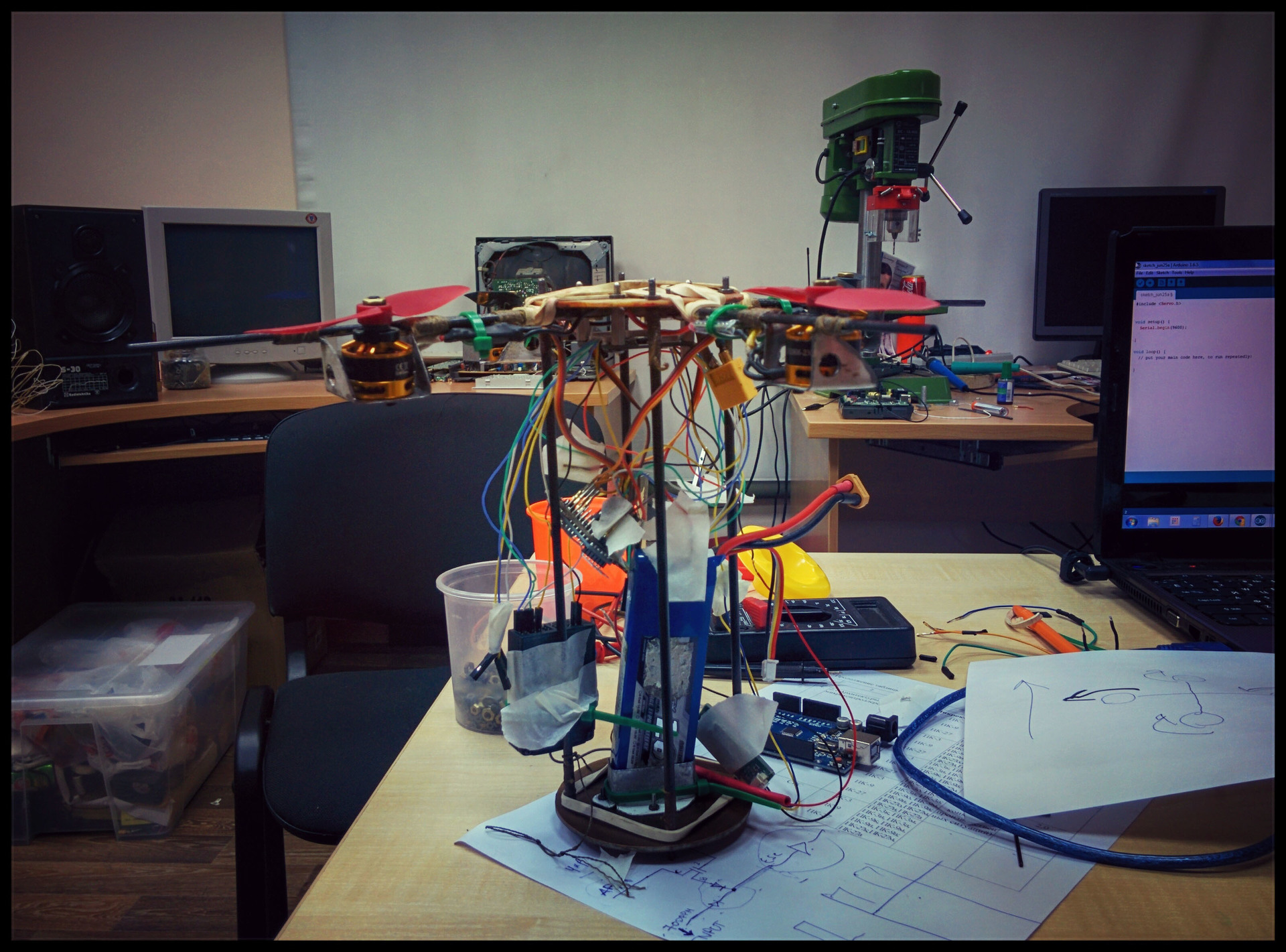 调试最终版本我们不必谈论严格的飞行测试,我们只有一个工作模型,它的损失意味着失败。第一次发射是在建筑物内部,它是成功的,第二次在手动模式下在大街上的发射是成功的,在gps保持模式下的第三次发射几乎是致命的。由于磁强计的调整不正确,探头停止遵守命令,并飞向最近的湖泊,因为旅馆的墙壁将其挡住了。我们丢掉了2根横梁和2台螺旋桨,框架幸免了下来。我们有备用横梁,因此在几个小时内恢复了性能。长时间安装了磁力计之后,又进行了一次尝试-发射成功。它仍然需要检查返回基地的情况。这一天只是我的毕业典礼,但是没事做,我们去了野外,试图成功地回家。第二天我们去莫斯科发射,没有欢乐的极限,但是自动披露的代码仍然没有写好,看来我们重复了去年的错误。测试返回基准我将向您详细介绍自动披露系统。它由伺服驱动器,绳索,橡皮筋,控制板和光电探测器组成。
调试最终版本我们不必谈论严格的飞行测试,我们只有一个工作模型,它的损失意味着失败。第一次发射是在建筑物内部,它是成功的,第二次在手动模式下在大街上的发射是成功的,在gps保持模式下的第三次发射几乎是致命的。由于磁强计的调整不正确,探头停止遵守命令,并飞向最近的湖泊,因为旅馆的墙壁将其挡住了。我们丢掉了2根横梁和2台螺旋桨,框架幸免了下来。我们有备用横梁,因此在几个小时内恢复了性能。长时间安装了磁力计之后,又进行了一次尝试-发射成功。它仍然需要检查返回基地的情况。这一天只是我的毕业典礼,但是没事做,我们去了野外,试图成功地回家。第二天我们去莫斯科发射,没有欢乐的极限,但是自动披露的代码仍然没有写好,看来我们重复了去年的错误。测试返回基准我将向您详细介绍自动披露系统。它由伺服驱动器,绳索,橡皮筋,控制板和光电探测器组成。 探头浸没在火箭中,那里很暗,在固定的MK光电探测器的帮助下,系统进入待机模式。火箭启动,分离,光通量增加,伺服器释放保持射线的绳索(它们的正常状态是由于橡皮筋打开),射线打开,在3秒钟后,董事会将机载飞行微控制器接入速度控制器,然后开始飞行至第一点,再飞回家。披露管理委员会还控制红外摄像机。将原始数据的处理从传感器传输到计算机后,频率从18 fps增加到30 fps(数据记录在microSD上)。我们必须努力控制引擎:您不能先断开MK和速度控制器之间的连接,然后还原-它们将不会启动。首先,您需要发出信号进行初始化,然后才可以访问航班MK。因此,我必须创建一个方案,使其能够从飞行微米和经理那里访问调节器。我们顺利进行到最后阶段-
探头浸没在火箭中,那里很暗,在固定的MK光电探测器的帮助下,系统进入待机模式。火箭启动,分离,光通量增加,伺服器释放保持射线的绳索(它们的正常状态是由于橡皮筋打开),射线打开,在3秒钟后,董事会将机载飞行微控制器接入速度控制器,然后开始飞行至第一点,再飞回家。披露管理委员会还控制红外摄像机。将原始数据的处理从传感器传输到计算机后,频率从18 fps增加到30 fps(数据记录在microSD上)。我们必须努力控制引擎:您不能先断开MK和速度控制器之间的连接,然后还原-它们将不会启动。首先,您需要发出信号进行初始化,然后才可以访问航班MK。因此,我必须创建一个方案,使其能够从飞行微米和经理那里访问调节器。我们顺利进行到最后阶段-发射
似乎在发射前一夜,一切都准备就绪,我们甚至逐点测试了飞行,它确实飞行了,但是没有人想到进行完整的模拟。结果,开车把我们带到了发射场的那辆巴士发现该代码无法正常工作。我邀请一个朋友评论主循环,在此循环中,所有其他系统的工作开始确定问题的根源。在发布前的剩余时间内,我们试图修复该错误,要求组织者让我们坚持下去。最终,问题得到了解决,但事实证明,我的朋友没有注释掉周期,而是设置了“调试”返回值,没有人愿意删除它。碰巧的是,火箭无法将探测器提升到规定的公里数之内,第二天才升至500米,因此我们决定使用六轴直升机进行发射。为了模拟探测器在火箭中的位置,我们在光电探测器上盖了一个帽,其另一端与六旋翼飞机绑在一起。因此,六旋翼飞行器随着我们的摇摆探针而上升,逐渐变成一个难以区分的点;探测器是以每公里FPV的速度释放的,但由于分辨率较低,目前尚不清楚是否发生泄漏,有人甚至说它没有打开并掉下石头(最初它必须在给定的位置飞行,然后返回起点,但即使经过5分钟的等待,也没有人看到他)。当然,我们很沮丧,然后去野外寻找他的遗骸,但是,在查看最新的遥测数据时,我们注意到,尽管与探头的连接消失了,但最后的坐标指示了来自欧洲防风草的相邻领域。让我们沿着坐标走;一路上,另一支队伍说她看到他坐在灌木丛中。搜索开始。事实证明,即使知道其坐标,也很难在草地上找到一个小探针。最后,我决定打开引擎以安装一个据称已放电的电池,然后我必须清洁内置电压表。该计划行之有效,我们发现它是安全无虞的,即使由于螺旋桨的拉长,即使螺旋桨也没有受到伤害。 由于“调试”返回,快乐的人回家处理数据,或者说数据不存在。没错,我们从飞行控制器获得了数据,并进行了分析。得到了轨迹,高度图和系统误差图。
由于“调试”返回,快乐的人回家处理数据,或者说数据不存在。没错,我们从飞行控制器获得了数据,并进行了分析。得到了轨迹,高度图和系统误差图。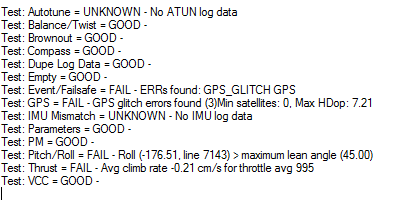
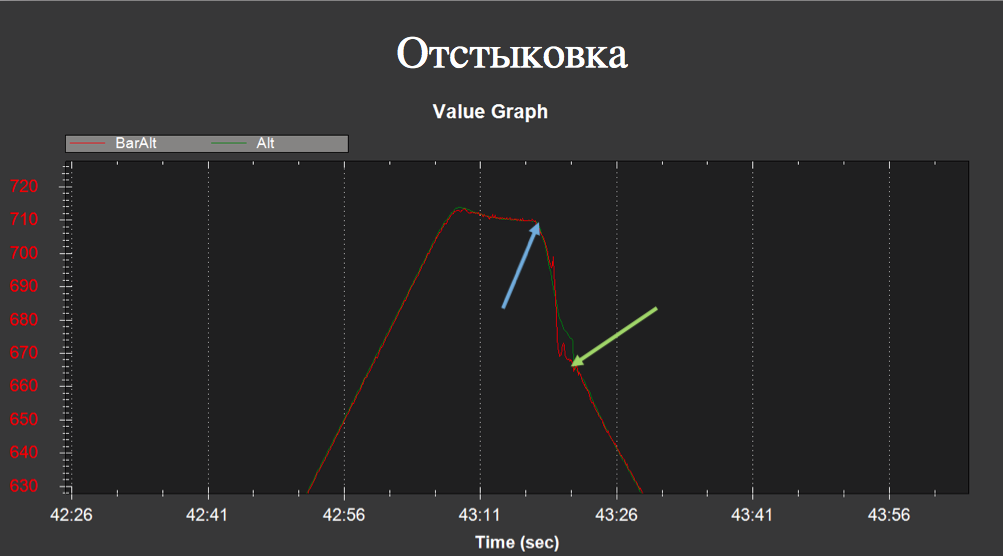 蓝色箭头-开启引擎的时刻;绿色箭头-包含返回家园模式的时刻,我们也收到了直升机的记录。结果是他成功地分离了光线,释放了光线,打开了引擎,能够从颠倒的位置平稳下来并飞到了最近的位置。
蓝色箭头-开启引擎的时刻;绿色箭头-包含返回家园模式的时刻,我们也收到了直升机的记录。结果是他成功地分离了光线,释放了光线,打开了引擎,能够从颠倒的位置平稳下来并飞到了最近的位置。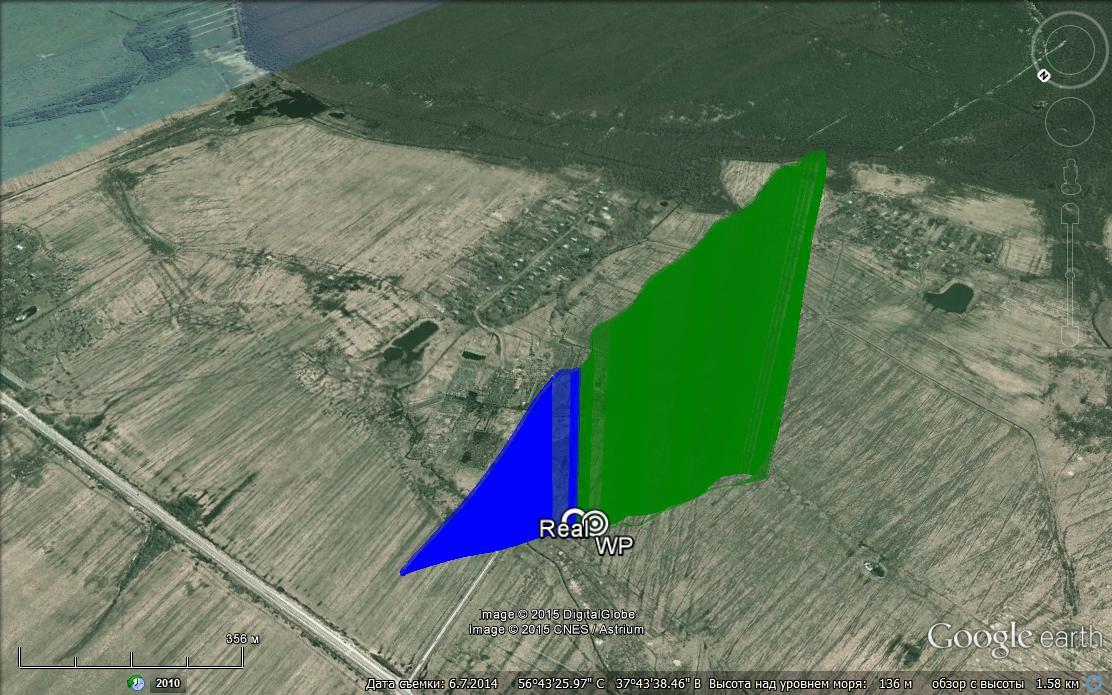 然后与基站的通信中断,这正是我没有考虑到的时刻。在默认设置下,他被指示按点中断飞行并返回家中,因此他停止下降并准备降落,但是在那之前,我们太快地打开了引擎,然后才有时间“预热” GPS,所以他不记得那些坐标了。 ,我没有正确记录房屋的位置(尽管为什么房屋沿其路径位于一条直线上是一个问题)。然后他以自动模式平稳着陆并关闭了引擎。
然后与基站的通信中断,这正是我没有考虑到的时刻。在默认设置下,他被指示按点中断飞行并返回家中,因此他停止下降并准备降落,但是在那之前,我们太快地打开了引擎,然后才有时间“预热” GPS,所以他不记得那些坐标了。 ,我没有正确记录房屋的位置(尽管为什么房屋沿其路径位于一条直线上是一个问题)。然后他以自动模式平稳着陆并关闭了引擎。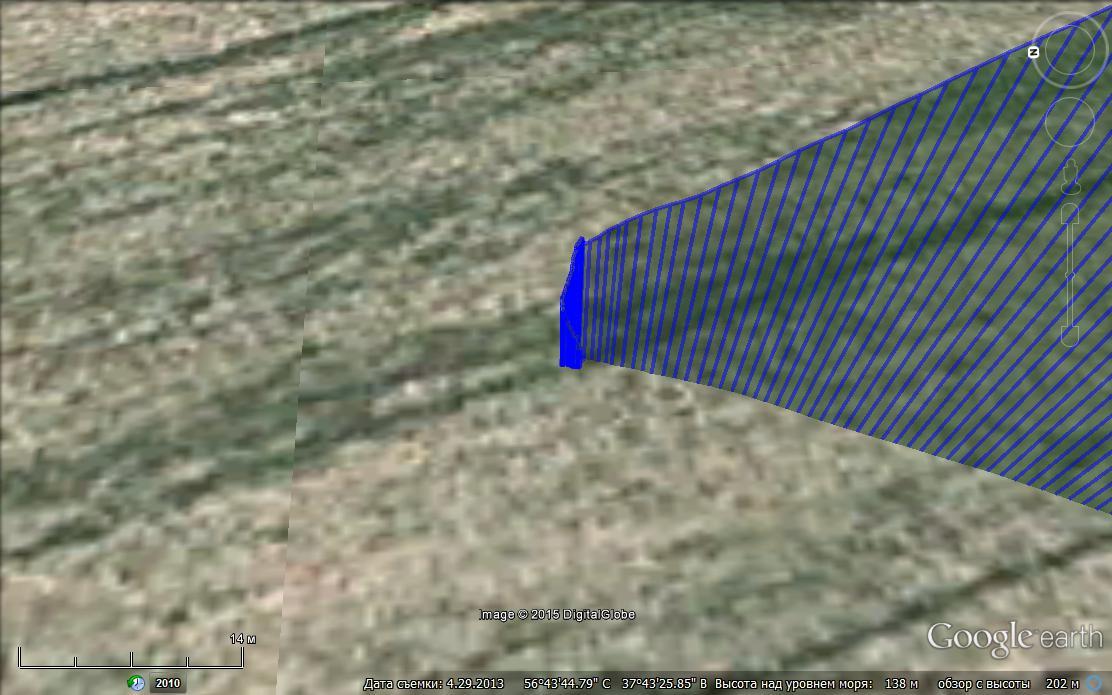 在经历了如此多的错误之后,我们不希望排名第一,但是陪审团似乎对此表示赞赏。因此,我们赢得了俄罗斯的第四届CanSat冠军。
在经历了如此多的错误之后,我们不希望排名第一,但是陪审团似乎对此表示赞赏。因此,我们赢得了俄罗斯的第四届CanSat冠军。聚苯乙烯
我从来没有在CanSat探针的受控下降上找到一个可行的项目,也许我们是第一个,这很奇怪,因为一切都相对简单。参考文献:
在这里,您可以了解去年的kansat。官方网站,如果您想参加,我们用于离线飞行的固件网站后记?
- , , . , .
?
, , , .
?
300$ 500$, . , , , . , .
GPS ?
( ).