通过人工“神经元”网络创建了仿生蠕虫机器人原型
欢迎使用iCover博客页面!众所周知,我们周围的自然是无穷无尽的有用知识和经验的源泉,它们经常在未来最有希望的技术以及每天的日常水平上得到应用。今天,我们出版物的英雄是一只普通的,,它激发了科学家们创造了一个独特的仿生机器人。尽管许多人对earth持怀疑和敌对态度,但由于for寿命相对较短,它们仍做了很多有用的工作,而对于机器人来说,它们却是真正有价值的信息仓库。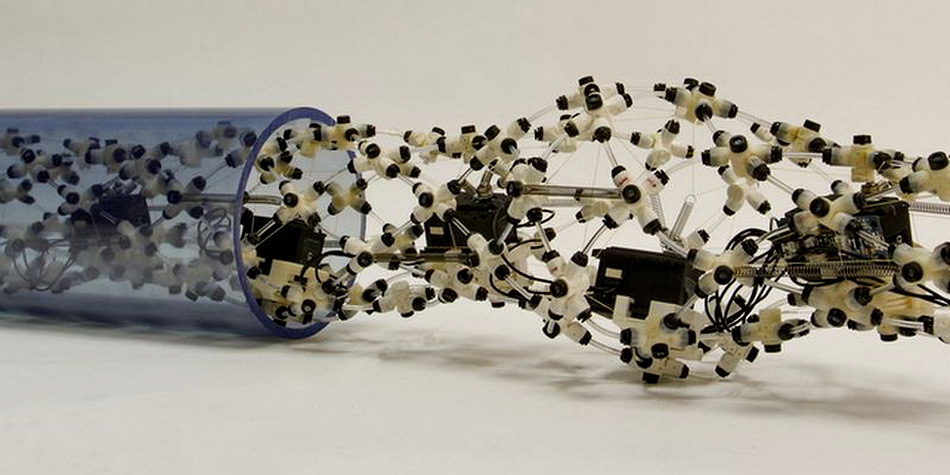 通过研究movement的运动机理,凯斯西储大学的机器人生物技术研究中心的工程师和神经学家联合小组开发了仿生蠕虫机器人CMMWorm。根据本发明人,该机器人可以用于研究难以接近的障碍物,在救援操作中,在检查管道时,在药品中以及在不能使用其他类型的机器人的其他区域中。团队负责人安德鲁·霍希勒(Andrew Horchler)解释说:“ E利用蠕动(空心管状器官壁的波状收缩,促进其内容物向出口开口的移动)以特殊的方式运动”。 “为此,蠕虫使用两种类型的肌肉,它们可以使充满液体的袋子收缩和膨胀,从而使它们变宽,变短,变薄和变长,从而最终确保它们朝着首选方向发展。...我们的仿生蠕虫机器人原型-” CMMWorm“使用外部网状外壳在整个身体上形成运动波。”在该项目之前,创建了许多中间运动学模型和2D仿真器,随着时间的推移,这些模型可以克服大型段上驱动机制的现有限制。为了分析worm运动的物理过程及其原理在当前机器人模型中的后续体现,工程师需要使用数学算法和计算机建模功能。”在研究了导致movement运动的物理和神经系统要素之后,霍霍勒及其同事创建了带有电子控制的3D打印机器人,该机器人能够准确地重复repeat的运动。工程师说:“这种移动方法在狭窄的空间内可能非常有效。例如,塑料蠕虫机器人可用于在挖掘过程中或在测深过程中检查管道。”节点模块在网络空间中的移动是由与中央微控制器同步的电驱动器提供的,从而可以模拟收缩和伸长。许多3D打印模块通过尼龙模具和驱动机构相互连接。同时,如果需要,可以通过像添加Lego构造函数元素一样快速而简单地添加其他预制的“部分”来扩展bot主体的模块化结构。
通过研究movement的运动机理,凯斯西储大学的机器人生物技术研究中心的工程师和神经学家联合小组开发了仿生蠕虫机器人CMMWorm。根据本发明人,该机器人可以用于研究难以接近的障碍物,在救援操作中,在检查管道时,在药品中以及在不能使用其他类型的机器人的其他区域中。团队负责人安德鲁·霍希勒(Andrew Horchler)解释说:“ E利用蠕动(空心管状器官壁的波状收缩,促进其内容物向出口开口的移动)以特殊的方式运动”。 “为此,蠕虫使用两种类型的肌肉,它们可以使充满液体的袋子收缩和膨胀,从而使它们变宽,变短,变薄和变长,从而最终确保它们朝着首选方向发展。...我们的仿生蠕虫机器人原型-” CMMWorm“使用外部网状外壳在整个身体上形成运动波。”在该项目之前,创建了许多中间运动学模型和2D仿真器,随着时间的推移,这些模型可以克服大型段上驱动机制的现有限制。为了分析worm运动的物理过程及其原理在当前机器人模型中的后续体现,工程师需要使用数学算法和计算机建模功能。”在研究了导致movement运动的物理和神经系统要素之后,霍霍勒及其同事创建了带有电子控制的3D打印机器人,该机器人能够准确地重复repeat的运动。工程师说:“这种移动方法在狭窄的空间内可能非常有效。例如,塑料蠕虫机器人可用于在挖掘过程中或在测深过程中检查管道。”节点模块在网络空间中的移动是由与中央微控制器同步的电驱动器提供的,从而可以模拟收缩和伸长。许多3D打印模块通过尼龙模具和驱动机构相互连接。同时,如果需要,可以通过像添加Lego构造函数元素一样快速而简单地添加其他预制的“部分”来扩展bot主体的模块化结构。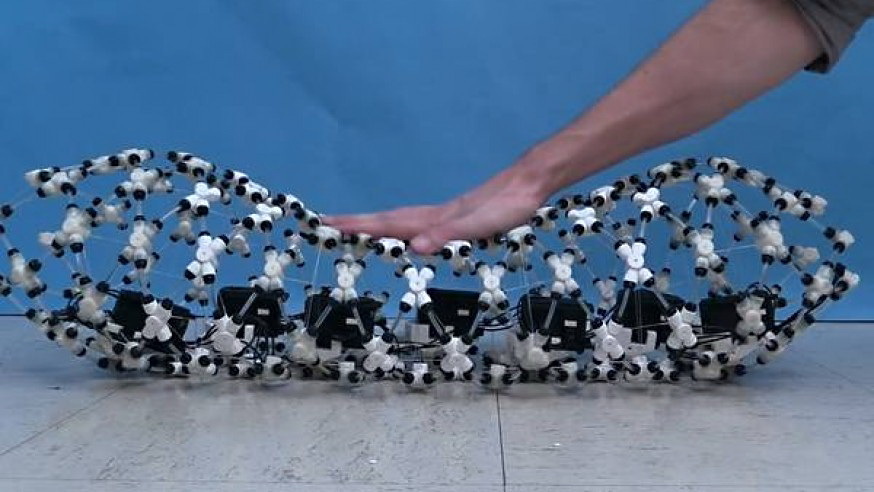 “ 蠕虫机器人身体的压缩范围高达最大直径的52%结合六个独立控制的扇形段以及用首选的扇形段替换外壳网格的功能,它们极大地扩展了使用CMMWorm概念的可能性...-向开发人员解释。-在可预见的将来,有可能创建用于内窥镜检查等过程中进入人体的CMM的微观修改。CMMWorm原型模块化仿生蠕虫机器人的最新版本尽管该机器人的设计具有外部简单性,但将项目最终定型为可扩展的水平,最重要的是,专家认为可以使用的有效解决方案仍需要几年的时间。您可以在此处了解有关开发的更多信息。
“ 蠕虫机器人身体的压缩范围高达最大直径的52%结合六个独立控制的扇形段以及用首选的扇形段替换外壳网格的功能,它们极大地扩展了使用CMMWorm概念的可能性...-向开发人员解释。-在可预见的将来,有可能创建用于内窥镜检查等过程中进入人体的CMM的微观修改。CMMWorm原型模块化仿生蠕虫机器人的最新版本尽管该机器人的设计具有外部简单性,但将项目最终定型为可扩展的水平,最重要的是,专家认为可以使用的有效解决方案仍需要几年的时间。您可以在此处了解有关开发的更多信息。
尊敬的读者,我们总是很高兴在博客页面上与您见面并等待您。我们准备继续与您分享最新新闻,评论文章和其他出版物,并会尽力使与我们一起度过的时光对您有用。并且,当然,不要忘记订阅我们的部分。我们的其他文章和事件 Source: https://habr.com/ru/post/zh-CN386807/
All Articles