Raspberry Pi机器人视觉:深度图
 如今,“无人机构建”的所有技术都在积极地变得越来越便宜。除了一个:获取周围空间的地图。有两个极端:要么是昂贵的激光雷达(数千美元)和用于构建深度图的光学解决方案(数百美元),要么是非常便宜的解决方案,例如超声波测距仪。因此,在一个带有一台照相机的廉价Raspberry Pi的基础上出现了一个想法,提出了一种解决方案,该解决方案将处于空白位置,并允许您“廉价”获得深度图。并以简单的编程语言(例如Python)进行操作,以便初学者可以尝试。实际上,我想介绍一下我的结果。生成的带有示例照片的脚本也可以在桌面上运行。
如今,“无人机构建”的所有技术都在积极地变得越来越便宜。除了一个:获取周围空间的地图。有两个极端:要么是昂贵的激光雷达(数千美元)和用于构建深度图的光学解决方案(数百美元),要么是非常便宜的解决方案,例如超声波测距仪。因此,在一个带有一台照相机的廉价Raspberry Pi的基础上出现了一个想法,提出了一种解决方案,该解决方案将处于空白位置,并允许您“廉价”获得深度图。并以简单的编程语言(例如Python)进行操作,以便初学者可以尝试。实际上,我想介绍一下我的结果。生成的带有示例照片的脚本也可以在桌面上运行。一台摄像机的深度图。
首先,谈谈光学部分。要创建深度图,始终使用两张图片-来自左右摄像机。我们用一台相机拍摄覆盆子。因此,开发了一种分光器,其结果是为相机提供了一对立体声。简而言之-如果您看照片,则相机的两只眼睛从黑匣子注视着您。但是实际上相机是一台。只是一点光学魔术。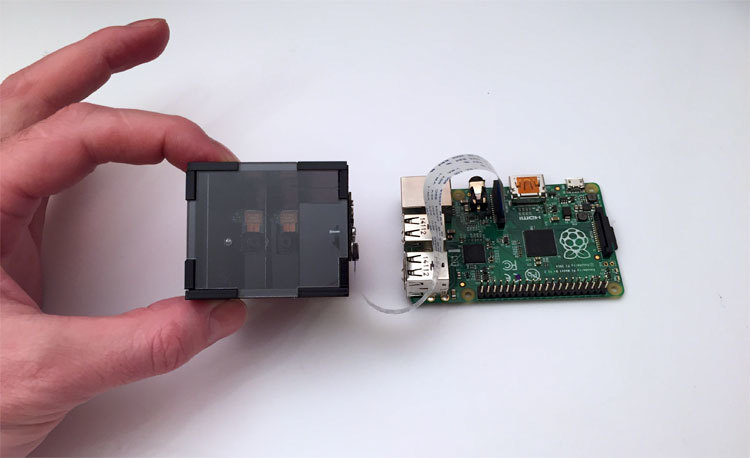 图为该设备的第十二次迭代。花费了很长时间才能获得可靠的稳定设计,但同时又很便宜。最困难的部分是内部反射镜,这些反射镜是通过真空沉积铝制成的。如果使用标准反射镜,其中反射层位于玻璃下方而不是玻璃上方,则在接合处它们会形成间隙,从而彻底破坏整个图片。
图为该设备的第十二次迭代。花费了很长时间才能获得可靠的稳定设计,但同时又很便宜。最困难的部分是内部反射镜,这些反射镜是通过真空沉积铝制成的。如果使用标准反射镜,其中反射层位于玻璃下方而不是玻璃上方,则在接合处它们会形成间隙,从而彻底破坏整个图片。我们将从事什么工作
Raspbian Wheezy的树莓派图像作为基础,安装了Python 2.7和OpenCV 2.4,好吧,这些小东西所需的软件包-matplotlib,numpy和其他。文章末尾列出了所有种类以及指向卡片最终图像的链接。可以在项目网站上找到课程形式的脚本描述准备用于构建深度图的图片
由于我们的解决方案不是由金属制成,也没有超精密光学器件,因此组装后可能会与理想的几何形状产生微小偏差。另外,相机是通过螺丝固定在设备上的,因此其位置可能不理想。相机位置的问题是手动解决的,结构组装的“曲率”补偿将通过软件完成。脚本一-摄像机对准
理想情况下,图片中镜子的交界处应垂直且居中。肉眼很难做到,因此制作了第一个脚本。它只是在实时预览模式下从相机捕获图片,然后将其显示在屏幕上,然后在叠加层的中央绘制一条白色的条,并沿着该条进行对齐。正确对准相机的方向后,我们用力拧紧螺丝,然后完成组装。第一个脚本的代码中有趣的是- –
- – , cv.imshow() , . , . , , .
- – , .. . «» , camera.hflip = True
第二个脚本-我们得到一个“干净的”立体声对
我们的左右图片在图片的中央。照片中的关节宽度非零-您只能通过从设备上卸下镜子来消除它,这会增加结构的尺寸。覆盆子的相机将焦点设置为无穷远,而位置靠近的对象(在我们的示例中为交汇处)只是“模糊”。因此,您只需要告诉脚本,我们认为这是一个“坏”区域,以便将立体声对切成清晰的图片。创建了第二个脚本,该脚本显示图片,并允许您使用键指示要剪切的区域。流程如下所示:第二个脚本的代码中有趣的是- , , cv2.rectangle(). , , . , , Enter .
- , . , .
- JSON. , , .
- . , , , . , ./src . . pf_1280_720.txt – , .
- , . . :
loadImagePath = ""
第三个脚本-一系列校准照片
基础科学说,为了成功构建深度图,必须对立体声对进行校准。即,左侧图片中的所有关键点都应在右侧图片中处于相同的高度。在这种情况下,StereoBM功能(这是我们唯一的实时功能)可以成功完成其工作。为了进行校准,我们需要打印参考图片,制作一系列照片,并将其提供给校准算法,该算法将计算所有失真并保存参数,以使图片恢复正常。因此,打印“国际象棋棋盘 ”并将其粘贴在坚硬的平面上。为简单起见,将串行照片制作为带有倒数计时器的脚本,该脚本显示在视频顶部。这是串行摄影脚本的工作方式:第三个脚本代码中有趣的是- . , . , , «» . , – , . camera.capture () , use_video_port=True.
- – camera.annotate_text() . 5 – .
- -, , ./src
应当指出,所进行系列的“正确性”对于校准结果至关重要。过一会儿,我们将看一下错误拍摄的照片所获得的结果。脚本4-在立体声对上剪切照片
拍摄完一系列照片后,我们将制作另一个服务脚本,该脚本将拍摄整个照片系列并将其左右切成两对,然后将其保存到文件夹中。图片中心的区域。脚本很普通,所以我将视频隐藏在剧透中。最有趣的是校准,第五个脚本
校准脚本将所有立体声对从./src文件夹馈入到校准功能,并陷入沉思。经过艰苦的工作(在第一个树莓上获取15张图片1280x720大约需要5分钟),他拍摄了最后一对立体声,“校正”图片(校正)并显示已经校正的版本,您可以通过这些版本建立深度图。这是工作脚本的样子:“出事了。”
有时校准结果出乎意料。以下是几个引人注目的示例: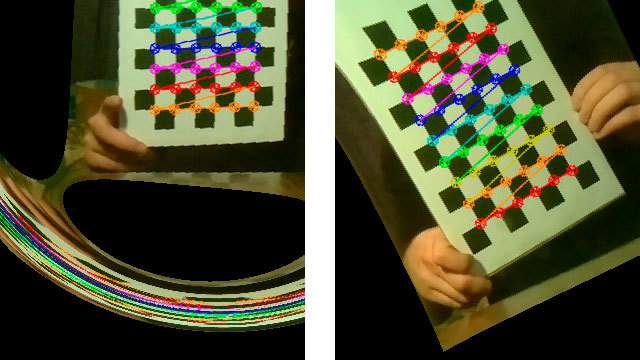 实际上,校准是决定性的时刻。在构造深度图的阶段,我们得到的结果直接取决于其质量。经过大量的实验,下面列出了一些射击要求:
实际上,校准是决定性的时刻。在构造深度图的阶段,我们得到的结果直接取决于其质量。经过大量的实验,下面列出了一些射击要求:- 图片棋是不平行于所述图像平面-总是从不同的角度。但是即使没有狂热主义,如果您将木板垂直于照片的平面放置,脚本也不会在图片中找到象棋。
- 轻,好光。在昏暗的室内照明下,甚至从视频中拉出图片时,图片质量也会下降。就我而言,在90%的情况下,光线立即可以纠正这种情况。
- 互联网上写道,板应尽可能占据图像中的最大空间。真的有帮助。
具有良好校准结果的“固定”立体声对的外观如下: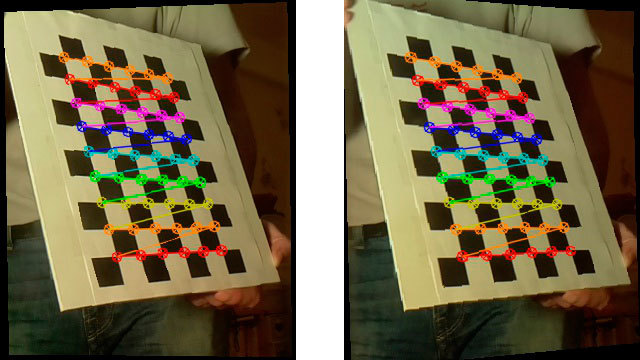
脚本6-首次尝试构建深度图
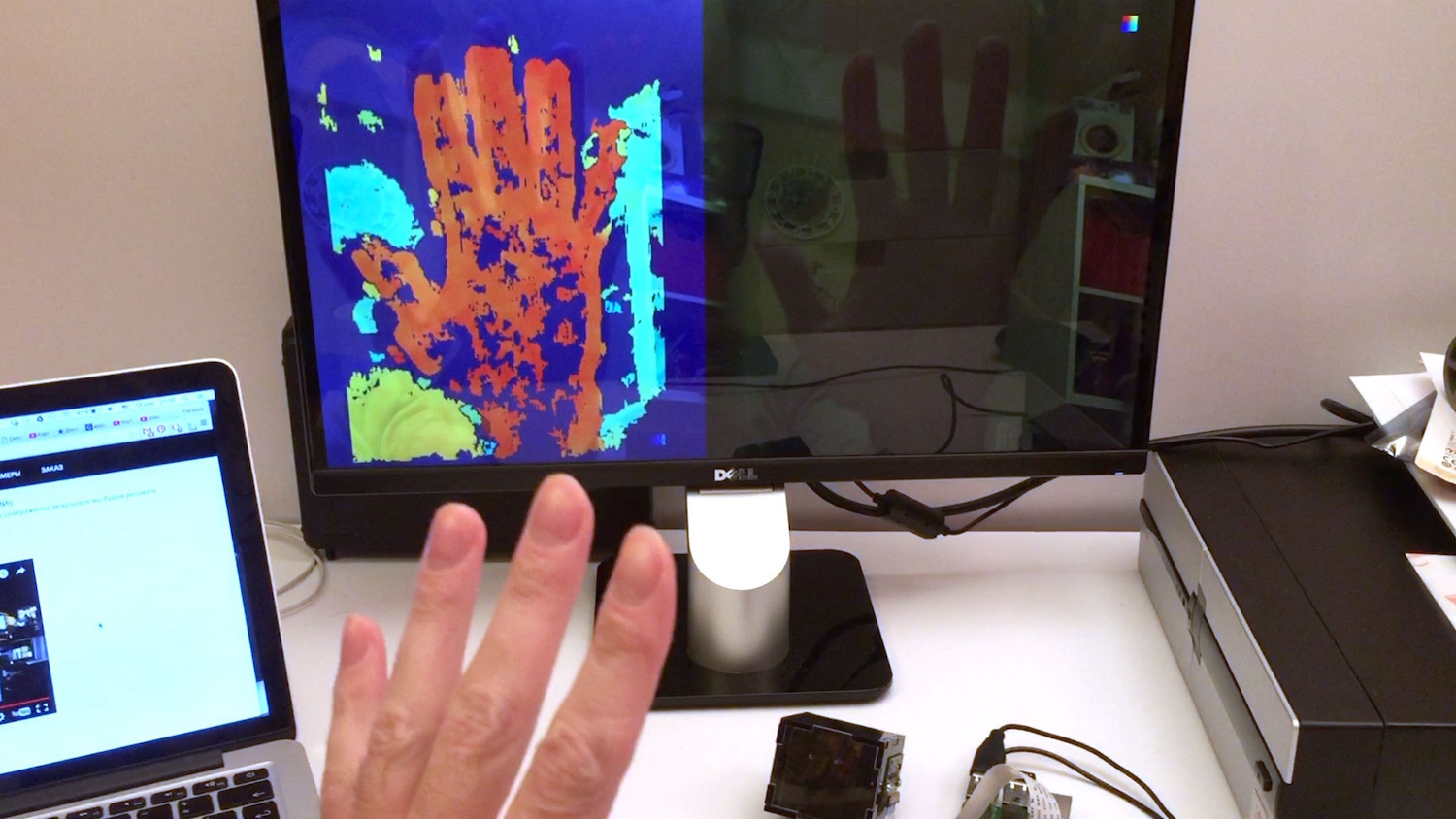
就像一切准备就绪一样,您已经可以构建深度图。我们加载校准结果,拍照并使用cv2.StereoBM大胆地构建深度图。我们得到这样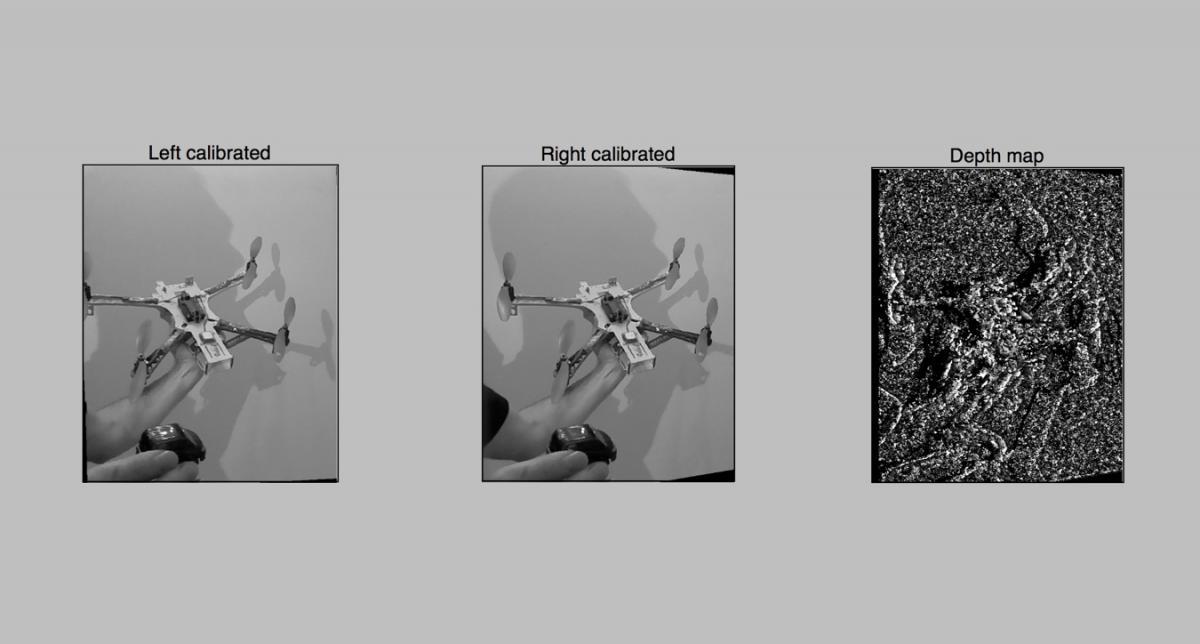 的结果:结果不是很令人印象深刻,显然我们需要扭转一些东西。好吧,让我们继续在下一个第7个脚本中进行更好的调整。在那里,我们将使用的不是2个参数,如StereoBM(),而是将近10个,这更有趣。这是第六个脚本的来源
的结果:结果不是很令人印象深刻,显然我们需要扭转一些东西。好吧,让我们继续在下一个第7个脚本中进行更好的调整。在那里,我们将使用的不是2个参数,如StereoBM(),而是将近10个,这更有趣。这是第六个脚本的来源脚本7-具有高级设置的深度图
如果参数不是2而是10,那么在不断重启脚本的情况下对它们的选项进行排序是错误的。因此,制作了一个脚本,用于对深度图进行方便的交互式调整。任务不是使代码与接口复杂化,因此所有操作都在matplotlib上完成。树莓派上matplotlib中界面的绘制相当慢,因此我通常将工作文件夹从树莓派转移到笔记本电脑上,然后在其中选择参数。脚本的工作方式如下:选择参数后,“保存”按钮旁边的脚本会将结果以JSON格式保存到3dmap_set.txt文件中。第7个脚本的代码中有趣的是- 7-
- . , - , .
- , . , numOfDisparities 16, . update(val), . numOfDisparities 65.57 64. , .
- matplotlib , .
深度图的实际工作表明,首先,您需要选择minDisparity参数,并将其与numOfDisparities结合使用。好吧,请记住,在步骤16中,numOfDisparities实际上是离散变化的。设置了该对之后,您可以使用其他参数。卡设置的功能已经取决于用户的喜好,并取决于要解决的任务。您可以将地图带到大量的小零件或显示放大的区域。为了使机器人简单地避开障碍物,第二种方法更为合适。对于点云,这里首先出现性能问题(我们将再次讨论它们)。我们想看什么?
好吧,最重要的一点之一也许就是调整我们设备的“远见”。设置深度图时,通常将一个对象放置在大约30厘米的距离上,第二个放置在一米的距离内,其余放置在两米的距离上。在第7个脚本中设置前两个参数(minDisparity和numOfDisparities)时,我实现了以下目标:- 最近的物体(30厘米)-红色
- 半米内的物体-黄色或绿色
- 2-3米的物体-绿色或浅蓝色
结果,我们得到一个系统,该系统被配置为识别半径为5-10米的障碍物“附近”区域。实时处理视频-脚本8,最终
好了,现在我们有一个现成的定制系统,我们将不得不得到实际的结果。我们正在尝试使用相机中的视频实时构建深度图,并在更新时实时显示。在速度竞赛中
因此,第一次测量是在第一个具有单核处理器的Raspberry上完成的。- 4秒 -映射图像1280×720这是一个很大。- 2.5秒 -到树莓PI 2更好。分析表明,在这种情况下,第二个覆盆子仅使用一个核心。乱!我使用TBB并行化库重建了OpenCV。- 1.5秒 -使用多个核启动第二树莓。实际上,事实证明只使用了2个核心-仍然需要修补。事实证明,不仅我遇到了这个问题,所以还有很大的发展空间。通过算法判断,运算速度应线性取决于处理数据的大小。因此,如果将分辨率降低2倍,则理论上所有操作的速度应提高4倍。- 0.3秒,或约3-4 FPS -在减压两次640×360的分辨率。该理论得到证实。进一步的计划
首先,我想充分利用第二个覆盆子的多核功能。我将仔细研究StereoBM函数的来源,并尝试了解为什么工作没有一直进行下去。下一阶段将带来更多的冒险-这是使用树莓GPU来加快计算速度。这里绘制了三种可能的路径:如果您有使用RBBberry OpenCV的TBB的经验,或者您正在处理Raspberry GPU的编码,我将不胜感激其他提示。由于一个简单的原因,我设法找到了许多现成的产品-很少有带两个摄像头的树莓。如果您通过USB挂接两个网络摄像头,则会大刹车,并且只有Raspberry Pi Compute可以与两个本地摄像头配合使用,这也需要带有花边和适配器的大型开发板。有用的链接:
工作脚本:在树莓派上设置OpenCV和Python:StereoVision库:GPU工作好吧,有关habr的有趣文章“ 识别图像,您不需要识别图像 ”Source: https://habr.com/ru/post/zh-CN388259/
All Articles