可以下棋的木制机器人
您可能已经看到了许多基于Arduino的项目,这些项目是通过某种智能手机进行管理的。通常,这样的项目是这样的:一台插入了蓝牙模块的机器,从手机上的操纵杆仿真器向其发送命令(或类似的命令)。产生了许多这样的小玩意,我想到了这样的想法。但是,如果Arduino可以帮助您暂时退出智能手机,但同时继续玩呢?这样一个国际象棋机器人的项目就诞生了,他的“大脑”和“眼睛”集中在Android智能手机中。更多细节-在削减。一般视图
[Hirez]这整个组成是一个木盒子,上面放着一个棋盘,一个操纵器和一个背光支架,电话放在上面。游戏结束后,所有上述物品都将被移到这个盒子中,并且可以毫无问题地运输到任何地方,例如背包。工作原理如下。在板子顶部的特殊支架上,安装了带有特殊应用程序的电话,该应用程序使用计算机视觉系统将部件的当前位置固定在板上。基于系统监视所有动作的事实,无需从视觉上确定单元中的图形,就足以知道其存在和颜色的事实。确定某人的举动后,此信息将被传输一个国际象棋引擎,决定他需要响应哪个动作。接下来,计算机器人必须采取的位置才能进行移动的角度。然后,此信息通过蓝牙发送到机械手。机械手只能接受此信息并采取行动。我希望本文的读者会在这里为自己找到一些有趣的东西。也许有人想重复这个项目,或者做类似的事情。我想马上说不会有一个教程,因为仅按照说明复制该作品将不会一步一步地进行,因为只有在尝试实现它时,才能理解很多微妙之处。如果您想查看机械手的图纸,或者有任何其他问题,请在GT或VK上写个人信息,我将根据要求免费提供。软件部分
所有这些组成都由一个小型Android应用程序控制。他的任务很多:确定板上的数字,计算操纵器的角度,与国际象棋引擎一起工作,机器人的几个语音消息,例如“我为您设置了支票!”和“感谢您的比赛!”但是有了这些,应用程序界面就可以放在一个屏幕中。视觉系统非常简单。从电话的角度来看,例如国王和马之间并没有太大区别-视觉上,这两个数字看起来都像黑白圆圈。因此,系统不再熟悉每次看到的位置,而是记住所有动作的顺序。做出的举动很容易确定:如果程序在某个时间点看到一块已在一个单元中消失而又出现在另一个单元中,则将其视为举动。这就是它的工作原理。这种技术远景是通过Android API专门实现的,而无需使用OpenCV或类似工具。这是不对的,这是出于个人兴趣从零开始实现一切的原因。机械手
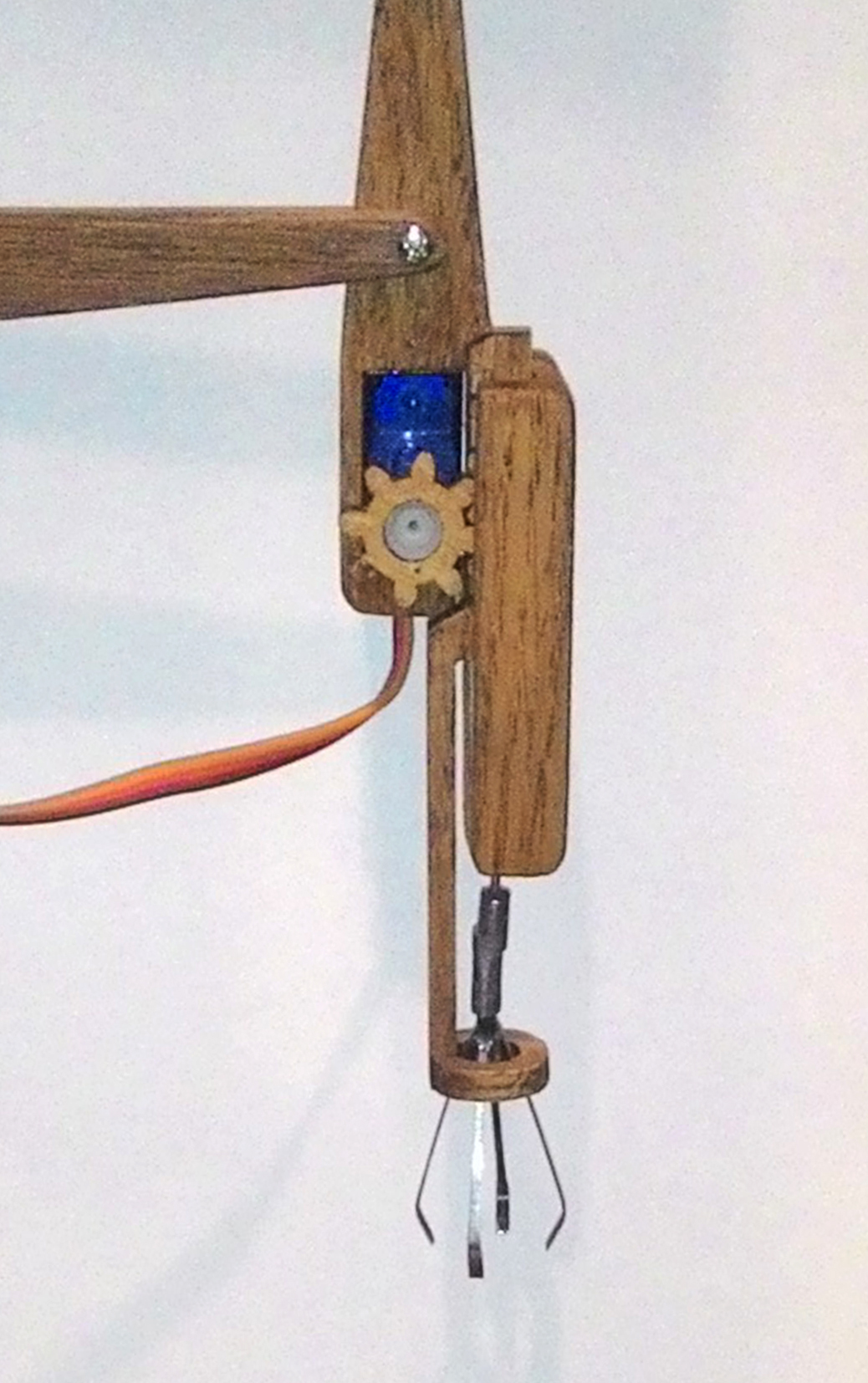
这样的机械手设计需要大量的创造性搜索,才能充分利用我大量购买的质量不高的廉价Chinese TowerPro sg-90伺服驱动器来充分执行其工作。因此,机械手的两臂均制成平行四边形,这使得形状捕获系统始终保持在垂直位置。反过来,这使得不必添加另一个伺服器,因此,系统将具有更少的错误,更轻便或更多或更少可靠。由于齿轮也是用木头制成的,因此很难获得最高的工作质量,因此,为了补偿齿隙,机械手在每次移动之前进行一次侧向移动,以接近一侧的每个点。至于电源,他的机器人是从两个主板上接收到的,这些主板通过电话的普通充电安全地放置在外壳中。一种电荷与蓝牙模块一起为控制器本身供电,另一种则直接向机械师供电。为了照明,拆除了LED灯泡。事实证明,里面有两块板:一个位于LED上,另一个位于电源转换器上。一个装在支架上,另一个装在盒体内。所有电源都显示在盒体侧面的小插座上:另一张图片显示了机械手的工作区域,上面标有红点。对于零轴,角度范围为180°。我没有立即制造出这样的机器人,有些原型工作得很差,有些却做了其他工作。例如,下面视频中的机器人将糖放入杯子中,然后搅拌海鸥。形状捕捉系统
我认为,特别有趣的是人物捕获系统的设计。这里最明显的解决方案是在伺服驱动器的控制下使两个颊板彼此相对移动。像这样:从图中可以看出,对于一组底部直径为18 mm的完全小块,您需要将棋盘格笼子的尺寸做成几乎两倍大,而且棋盘的尺寸也变得过大。在对该选项进行了几次失败的实现之后,我遇到了一种不寻常的事情,称为“柔性夹头抓地力”,它看起来像这样:也就是说,它是一个内部具有柔性的空心铁芯,末端带有一个小的金属弹簧爪,如果将其挤压到侧面,它将闭合。在没有压力的情况下,爪子立即打开。打破了这种捕获之后,我就建立了捕获数字的系统。金属爪压缩由伺服驱动的齿圈,该齿圈固定在齿条上。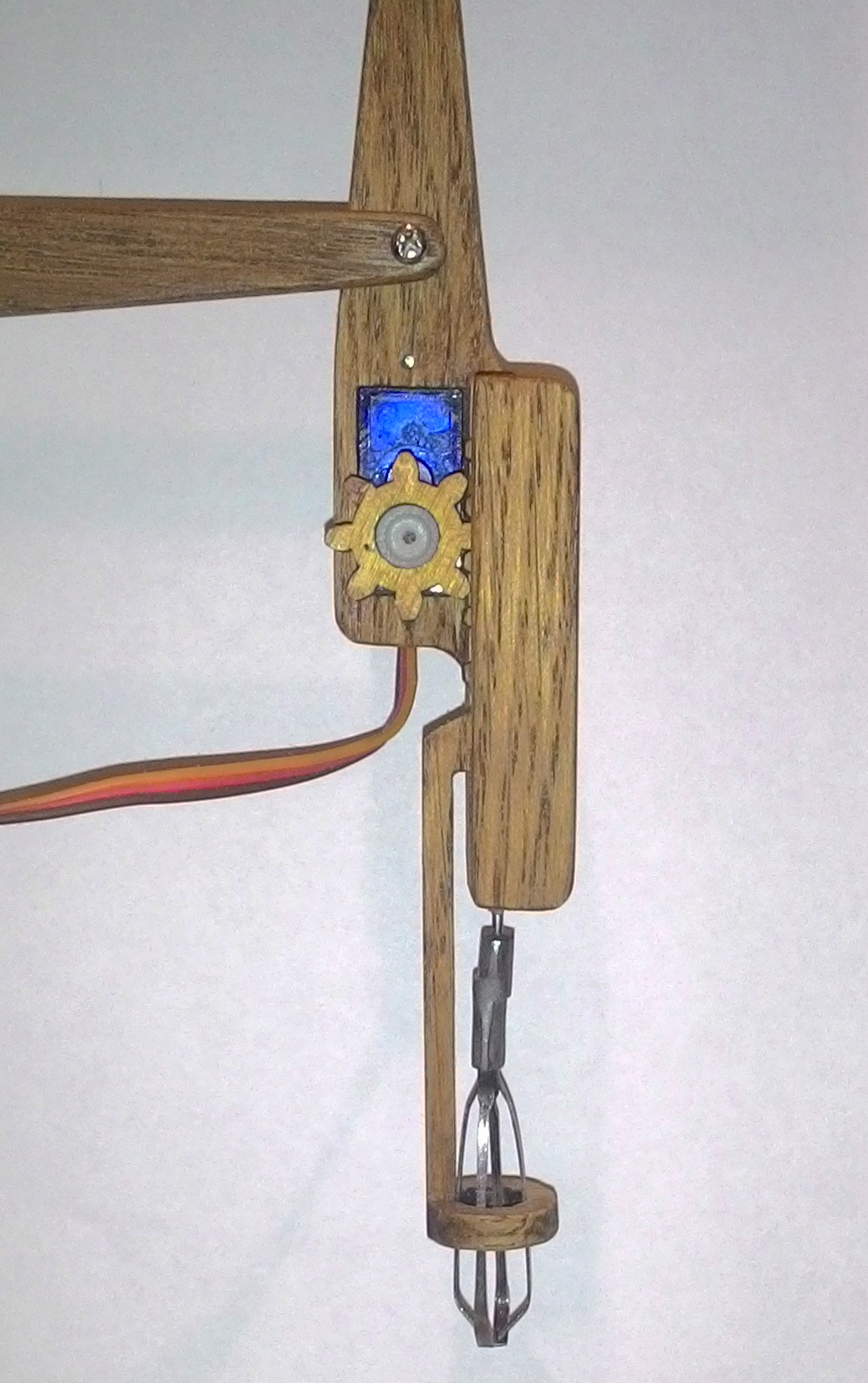
结果
该项目的工作仍在继续,结果也在逐步改善。目前,机器人可以玩不受黑白限制的移动次数的游戏。在这种情况下,无论是机械工作还是系统软件部分都不会出错。顺便说一句,他的打法不是很强,在第三级的水平上,可以通过更换国际象棋引擎来轻松纠正。我在“ Archimedes-2016”展览上演示了该机器人,在那里他连续6小时几乎不停地与其他人一起玩耍,并通过了这样的试驾。就这样,我希望您对这个项目感兴趣。当然,它具有实现功能的缺点,因此仍有改进,改进和发展的空间。我将很高兴收到评论中的任何建议,问题和建议。 Source: https://habr.com/ru/post/zh-CN392065/
All Articles