科学家能够通过在甲虫的肌肉中植入电极来控制甲虫的速度
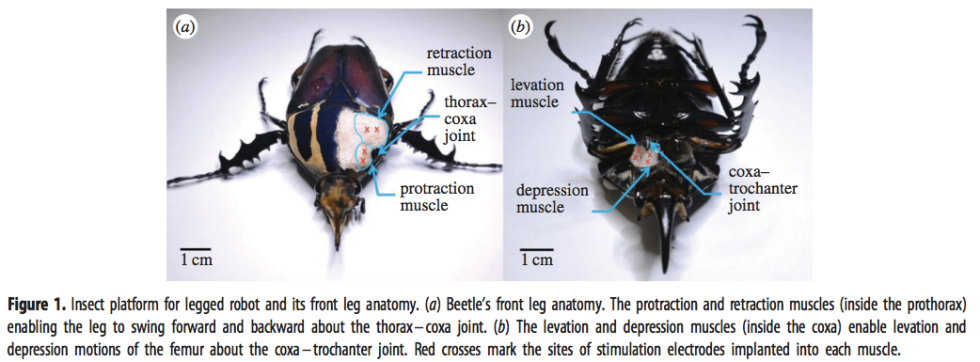 南洋理工大学的工程师在他们的工作中 演示了用青铜甲虫创造的生物机器人。植入物和微电路不仅可以控制昆虫的运动,而且还可以首次改变昆虫的运动速度。由于电极与昆虫的神经肌肉突触直接连接,因此可以进行速度控制。与先前基于蟑螂构建生物机器人的实验不同,电脉冲仅设定运动方向,在这种情况下,它们会影响相应肌肉的收缩程度。科学家报告说,从技术角度来看,在现成的,实时的bug“平台”上制作一个机器人比尝试使用复杂的设备模拟其所有动作要容易得多(尽管这样的研究当然也在进行中)。能耗最小化,不需要复杂的传感器系统等。在使用活甲虫的缺点中,科学家们注意到,对于半机械人的机能而言,温度范围有限且寿命短。到目前为止,科学家仅将电极连接到昆虫的前腿,但是这已经产生了有趣的结果。通过研究甲虫运动的各种变体,科学家们能够交替地冲动脉冲,甚至使它们具有不同的步态,而普通甲虫则不使用它们。科学家们希望,这些研究将有助于创建适用于各种任务的高效昆虫式机器人,从间谍活动到发现自然灾害的受害者。未来的计划包括使用昆虫的所有六个爪子,以更完全地控制其活动。在创建更简单的基于昆虫的电子人方面,已经取得了良好的进展。在2012年,科学家展示了一种无线电控制的蟑螂,几年前,Backyard Brains使用众筹资金,为想要在家中创建这种生物机器人的每个人创建了一个工具包。今年,工匠已经写了关于如何制作受控蟑螂的说明使用流行的单板Arduino。
南洋理工大学的工程师在他们的工作中 演示了用青铜甲虫创造的生物机器人。植入物和微电路不仅可以控制昆虫的运动,而且还可以首次改变昆虫的运动速度。由于电极与昆虫的神经肌肉突触直接连接,因此可以进行速度控制。与先前基于蟑螂构建生物机器人的实验不同,电脉冲仅设定运动方向,在这种情况下,它们会影响相应肌肉的收缩程度。科学家报告说,从技术角度来看,在现成的,实时的bug“平台”上制作一个机器人比尝试使用复杂的设备模拟其所有动作要容易得多(尽管这样的研究当然也在进行中)。能耗最小化,不需要复杂的传感器系统等。在使用活甲虫的缺点中,科学家们注意到,对于半机械人的机能而言,温度范围有限且寿命短。到目前为止,科学家仅将电极连接到昆虫的前腿,但是这已经产生了有趣的结果。通过研究甲虫运动的各种变体,科学家们能够交替地冲动脉冲,甚至使它们具有不同的步态,而普通甲虫则不使用它们。科学家们希望,这些研究将有助于创建适用于各种任务的高效昆虫式机器人,从间谍活动到发现自然灾害的受害者。未来的计划包括使用昆虫的所有六个爪子,以更完全地控制其活动。在创建更简单的基于昆虫的电子人方面,已经取得了良好的进展。在2012年,科学家展示了一种无线电控制的蟑螂,几年前,Backyard Brains使用众筹资金,为想要在家中创建这种生物机器人的每个人创建了一个工具包。今年,工匠已经写了关于如何制作受控蟑螂的说明使用流行的单板Arduino。Source: https://habr.com/ru/post/zh-CN392405/
All Articles