DIY FPV赛车无人机(第1部分)-组装
如今,无人驾驶赛车的受欢迎程度正在迅速增长。业余传单逐渐发展成为严肃的国际比赛,参与这一爱好的人数也在不断增加。我本人最近已经组装了一个180号FPV直升机(对角线之间的距离,以毫米为单位),我赶紧分享这一经验。 我在这里和这里描述了整个组装和配置过程,下面将是一个稍作修改的版本,其中包含我以前的文章中的更多信息。我将省去加入这一爱好的问题,直接进入直升机。
我在这里和这里描述了整个组装和配置过程,下面将是一个稍作修改的版本,其中包含我以前的文章中的更多信息。我将省去加入这一爱好的问题,直接进入直升机。四轴飞行器尺寸选择
一年前,第250尺寸的直升机很受欢迎。但是现在,飞行员更喜欢组装更小的设备,这是非常合理的:重量较小,但功率相同。我选择第180号尺寸并不是出于实际原因,而是作为一种组装挑战。实际上,这种选择方法并不完全正确。明智的选择是先选择螺旋桨的尺寸,然后再选择螺旋桨的尺寸-选择的螺旋桨将适合的最小框架。使用这种方法,通常会拒绝使用第180种格式。自己判断:第210格式允许您放置与250相同的5英寸螺旋桨,而二次方本身更容易,第4螺旋桨适合第160机架。事实证明,第180号尺寸是一种中间格式,“不是我们的,也不属于您的”。也可以将其加权160。但是,尽管如此,我还是选择了它。也许是因为这是可以或多或少舒适地拉GoPro或Runcam摄像机的最小尺寸。配饰
让我们从电动机开始。第180个尺寸的“中间度”以及丰富的分类使选择复杂化。一方面,您可以采用第160个组件,另一方面,可以使用第210个甚至250个组件。必须从螺旋桨和电池(罐数)出发。我认为没有理由使用3S电池,对于螺旋桨,一般规则如下:- 需要最大静推力-增加螺旋桨直径并减小螺距(在合理范围内)
- 需要高速-减小直径并增加步长(在合理范围内)
- 您需要小直径的高推力-增加叶片的数量(同样在合理的范围内,因为如果可以看到两叶和三叶螺旋桨之间的差异明显,那么三叶和四叶螺旋桨之间的差异就不会太大了)
就我而言,我的螺旋桨尺寸限制为4英寸,但没有马达限制。因此,使用三叶4045牛鼻螺旋桨是最合理的。它们很难平衡,但是有了它们,控制更加敏感和可预测,声音更安静。另一方面,对于两叶螺旋桨,直升机的速度更高,但我绝对不需要。在180年代“流行”的设置如下:- 轻巧,带有电动机1306-3100KV,传统的4045螺旋桨和850mAh电池
- 重量大,功能强大,适用于三叶斗牛螺旋桨和带有2205-2600KV电机和1300mAh电池的运动相机
实际上,该框架允许您放置从1306-4000KV到22XX-2700KV的电动机。顺便说一句,我不知道为什么,但是1806-2300KV电动机现在已经很丢人了,很少使用。我为二次型RCX H2205 2633KV装了马达。首先,我想拥有一定的权力(尽管我的驾驶技能不高,但原因尚不清楚)。其次,我的装置从未实现超轻,此外,我还计划携带运动相机。具体来说,RCX电机是一个折衷的选择。它们很便宜,但是对质量有很多抱怨。在购买组件时,这些是市场上为数不多的2205-2600KV电动机之一。现在(在撰写本文时),范围更大了,最好选择其他东西。对于其余部分,他遵循“更多挑战”的原则行事:- RC180 V2. ( 2-3 ), , 3. , , , , 1-2 .
- FrSky D4R-II. FrSky X4R-SB, , . , . .
- FVT LittleBee 20A — , . - FVT LittleBee 20A PRO Silabs F396 ( , Silabs F330), FVT LittleBee 20A-S, BLHeli_S. LittleBee 20A.
- Foxeer FX799T — , .
- Sony Super HAD CCD 600TVL (IR Block, NTSC, 2.8). Foxeer XAT600M, .
- Diatone.
- -«» BeeRotor -.
- MICRO MinimOSD.
- , . Matek Mini Power Hub, . , 3S, PBD .
- Turnigy nano-tech 1300mAh 4S 45~90C.
- ZG 12Bit WS2812B LED Board. , , - ( ) . .
- DYS 3-blade 4040 Bullnose.
飞行控制器选择
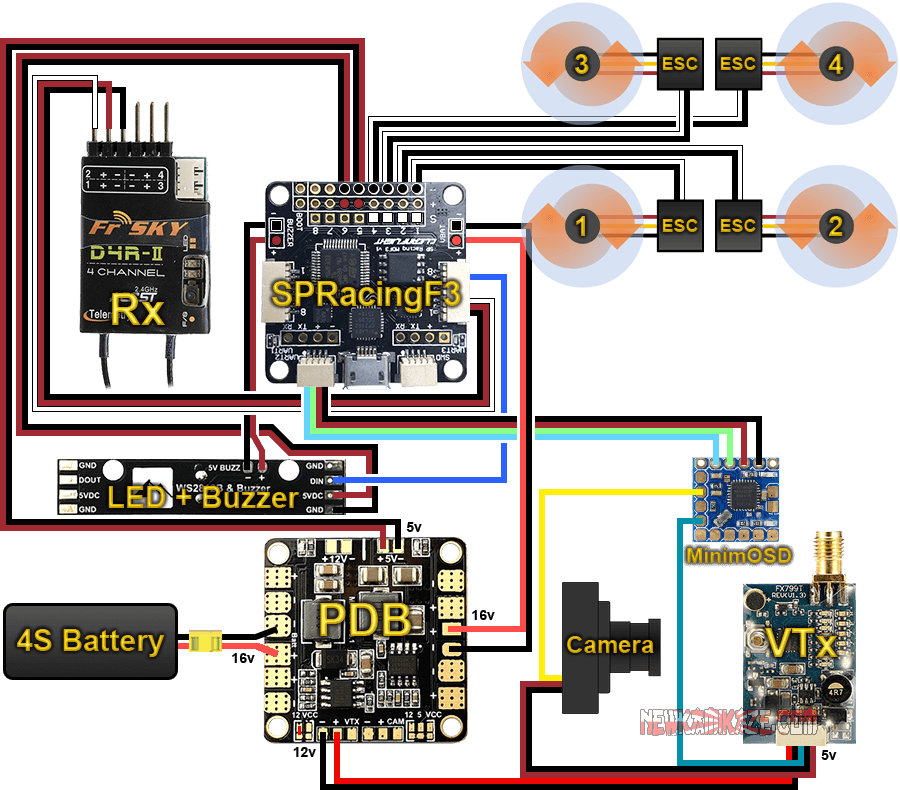
您可能会注意到列表中没有飞行控制器。我想更详细地描述他的选择。低成本的构建套件通常包含CC3D控制器,因此,目前它可能是最便宜的PC。今天,绝对没有必要购买CC3D。它已经过时,并且没有诸如电池监视和“高音扬声器”之类的必要内容。它的继任者CC3D Revolution是一款完全不同的产品,具有丰富的功能,但价格也超过40欧元。现代飞行控制器已经从F1处理器切换到F3,这使得最后一代Naze32 PC成为现实,并大大降低了其价格。现在,它确实是一个民间控制者,几乎可以用12欧元或以上的价格拥有灵魂所希望的一切。在新一代个人计算机中,Seriously Pro Racing F3最受欢迎,并且首先是由于廉价克隆的可用性。控制器本身绝不亚于Naze32,此外,它还具有快速的F3处理器,大量的内存,三个UART端口以及一个用于S.Bus的逆变器。我选择的是SPRacingF3 Acro。由于价格或某些特定功能(封闭的固件,布局等),未考虑其他现代PC的情况,我将分别指出当前将几块板合并为一块的流行趋势。大多数情况下,PC和OSD或PC和PDB除了少数例外,我都不支持这个想法。由于OSD烧毁,我不想更改整个飞行控制器。另外,如实践所示,有时这种结合会带来问题。接线图
显然,所有需要5V或12V电源的组件都将从配电板的BEC接收它。理论上,由于输入电压允许,因此可以从4S电池直接为摄像机供电,但绝对不能这样做。首先,所有摄像机都非常容易受到稳压器电路中的噪声的干扰,这会导致图像干扰。其次,激活制动的调节器(例如我的LittleBee)在激活该制动后会对车载网络产生非常严重的冲动,从而烧毁相机。此外,脉冲的存在直接取决于电池的磨损。新的不是,而旧的是。这是一个内容丰富的视频,介绍了来自监管机构的干扰以及如何对其进行过滤。因此,最好通过BEC或视频发射机为摄像机供电。另外,为了提高图像质量,建议不仅使用OSD上摄像机的信号线,还应使用地面。如果将这些线扭成“辫子”,则“地”将充当信号线的屏蔽。是的,在这种情况下,我没有。如果我们已经在谈论“接地”,那么通常会争论是将稳压器的“接地”连接到PC还是仅一根信号线。在传统的竞赛直升机上,您肯定需要进行连接。缺少它会导致同步失败(确认)。最终的接线图简单明了,但有一些细微差别:- 通过调节器输出从PDB提供飞行控制器(5V)
- 通过OI_1连接器从PC为无线电(5V)供电
- 来自PDB的视频发送器(12V)的电源
- 来自视频发射机的摄像机电源(5V)
- OSD连接到UART2。许多人为此使用UART1,但是像在Naze32上一样,此处此连接器与USB并行。
- Vbat连接到PC,而不是OSD。理论上,通过将电池彼此连接,可以在OSD和PC上读取电池电压读数(vbat)。有什么区别?在第一种情况下,读数只会显示在显示器或眼镜的屏幕上,而PC对此一无所知。在第二种情况下,PC可以监视电池电压,将其告知飞行员(例如,“尖叫者”),还可以将该数据传输到OSD,“黑匣子”,以及通过遥测传输到遥控器。通过PC调整读数的准确性也更加容易。即,将vbat连接到飞行控制器是更可取的。
组装方式
首先,这里有一些常规的组装技巧:- . , .
- , , , . , , . , .
- PLASTIK 71, . , , .
- . .
- «» ().
我更喜欢从电动机和调节器开始组装。这是一个有关小型直升机组装的好视频,我从中采用了排列电动机电线的想法。我还想谈谈调节器的安装:在哪里和用什么?它们可以固定在梁上和梁下。我选择了第一个选项,因为在我看来,监管机构在这一职位上受到了更大的保护(这些是我的推测,未经实践证实)。此外,当安装在横梁上时,调节器会被螺旋桨的空气完全冷却。现在介绍如何安装调节器。有很多方法,最受欢迎的是-双面胶带+一两个熨平板。 “便宜而开朗”,除此以外,不会造成困难。更糟糕的是,使用这种紧固件,可能会损坏调节板(如果在其上放置了耦合器)或电线(如果将其紧固)。因此,我决定用热缩管(25mm)固定调节器,然后将其与横梁焊接在一起。有一个警告:调节器本身也必须处于热收缩状态(矿井已出售),以免与光束的碳纤维接触,否则-短路。 在电机安装座的每个横梁上从下方粘贴一块双面胶带也很有意义。首先,它将保护电动机轴承免受灰尘的侵害。其次,如果出于某种原因拧开了一个螺栓,则螺栓在飞行过程中不会掉落,也不会丢失。组装框架时,我没有使用套件中的单个螺栓,因为它们都很短。取而代之的是,我的头稍长一些,头上装有十字螺丝刀(个人喜好)。相机不适合框架侧板之间的宽度。用锉刀轻微地处理了木板的边缘(很可能会磨出粗糙的地方),她起身没有任何问题。但是困难并没有就此结束。我真的很喜欢Diatone相机支架的质量,但是带有相机的支架的高度(约8-10毫米)不适合框架。首先,我通过氯丁橡胶减震器将支架固定在平板的外侧(上部),但结果证明这种设计不可靠。后来出现了最简单,最可靠的紧固方法。我只从Diatone的支架上取了一个夹子,然后将其放在一根带有M3螺纹的杆上。为了防止相机侧向移动,我用尼龙联轴器固定了固定夹。
在电机安装座的每个横梁上从下方粘贴一块双面胶带也很有意义。首先,它将保护电动机轴承免受灰尘的侵害。其次,如果出于某种原因拧开了一个螺栓,则螺栓在飞行过程中不会掉落,也不会丢失。组装框架时,我没有使用套件中的单个螺栓,因为它们都很短。取而代之的是,我的头稍长一些,头上装有十字螺丝刀(个人喜好)。相机不适合框架侧板之间的宽度。用锉刀轻微地处理了木板的边缘(很可能会磨出粗糙的地方),她起身没有任何问题。但是困难并没有就此结束。我真的很喜欢Diatone相机支架的质量,但是带有相机的支架的高度(约8-10毫米)不适合框架。首先,我通过氯丁橡胶减震器将支架固定在平板的外侧(上部),但结果证明这种设计不可靠。后来出现了最简单,最可靠的紧固方法。我只从Diatone的支架上取了一个夹子,然后将其放在一根带有M3螺纹的杆上。为了防止相机侧向移动,我用尼龙联轴器固定了固定夹。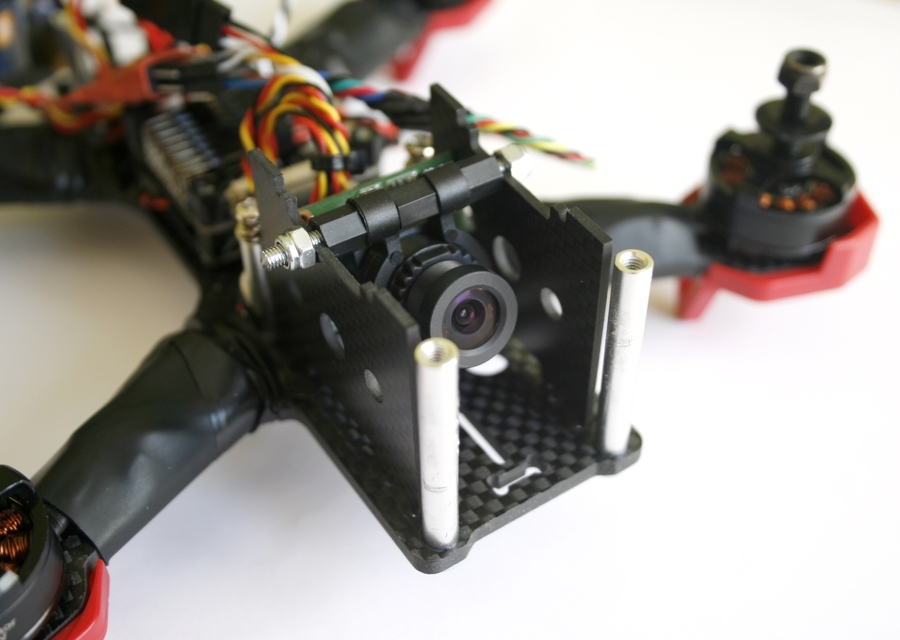 我非常喜欢仅需将调节器的连接器与PC上的连接器焊接在一起。完整的三针连接器不适合我的身高,我不得不动手使用两针连接器。对于前五个通道(调节器为4个通道,每个消防员为1个通道),我将连接器焊接到了信号垫和“地”上,将另外三个连接器焊接到了“正”和“地”上,以便可以为PC本身供电,也可以通过它供电。 -背光。鉴于飞行控制器的中国克隆产品由于不可靠地固定USB连接器而犯罪,所以我也焊接了它。 SPRacingF3克隆的另一个特点是高音扬声器连接器。与vbat一样,在板子的上侧有一个两针JST-XH连接器,在下侧有两个接触垫。诀窍是确保连接器上的“接地”克隆是恒定的,并且在使用时,将始终激活“高音扬声器”。 “高音扬声器”“地球”的正常工作仅显示在接触板上。测试人员可以轻松地检查这一点:连接器的“正号”在接触垫上带有“正号”,而“负号”则不起作用。因此,您需要将“高音扬声器”的导线焊接到PC的底部。
我非常喜欢仅需将调节器的连接器与PC上的连接器焊接在一起。完整的三针连接器不适合我的身高,我不得不动手使用两针连接器。对于前五个通道(调节器为4个通道,每个消防员为1个通道),我将连接器焊接到了信号垫和“地”上,将另外三个连接器焊接到了“正”和“地”上,以便可以为PC本身供电,也可以通过它供电。 -背光。鉴于飞行控制器的中国克隆产品由于不可靠地固定USB连接器而犯罪,所以我也焊接了它。 SPRacingF3克隆的另一个特点是高音扬声器连接器。与vbat一样,在板子的上侧有一个两针JST-XH连接器,在下侧有两个接触垫。诀窍是确保连接器上的“接地”克隆是恒定的,并且在使用时,将始终激活“高音扬声器”。 “高音扬声器”“地球”的正常工作仅显示在接触板上。测试人员可以轻松地检查这一点:连接器的“正号”在接触垫上带有“正号”,而“负号”则不起作用。因此,您需要将“高音扬声器”的导线焊接到PC的底部。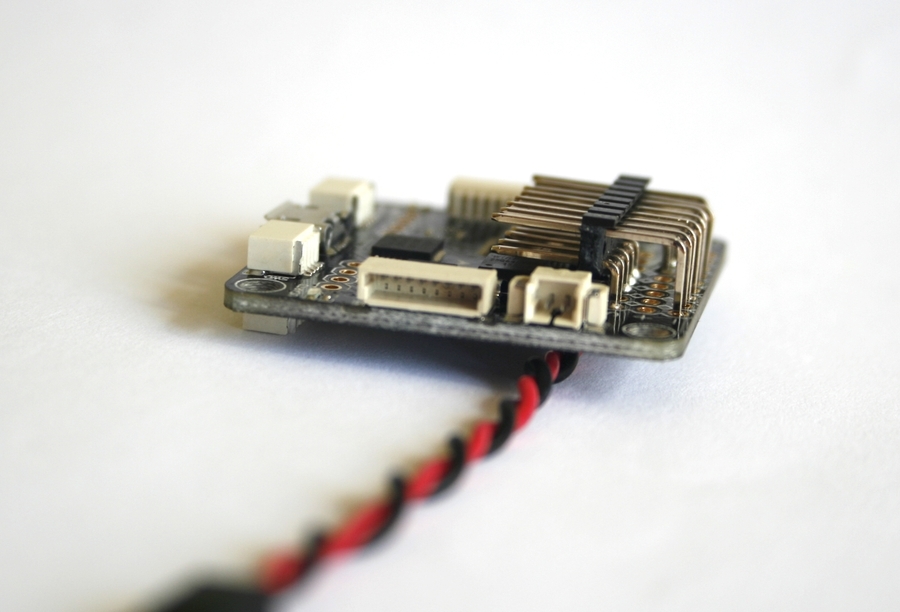 稳压器的三针连接器也必须更换。可以使用四个2针插头,但是我取了两个4针插头,并将所有控制器插入一个“地”,第二根插入信号线(按照连接电动机的顺序)。
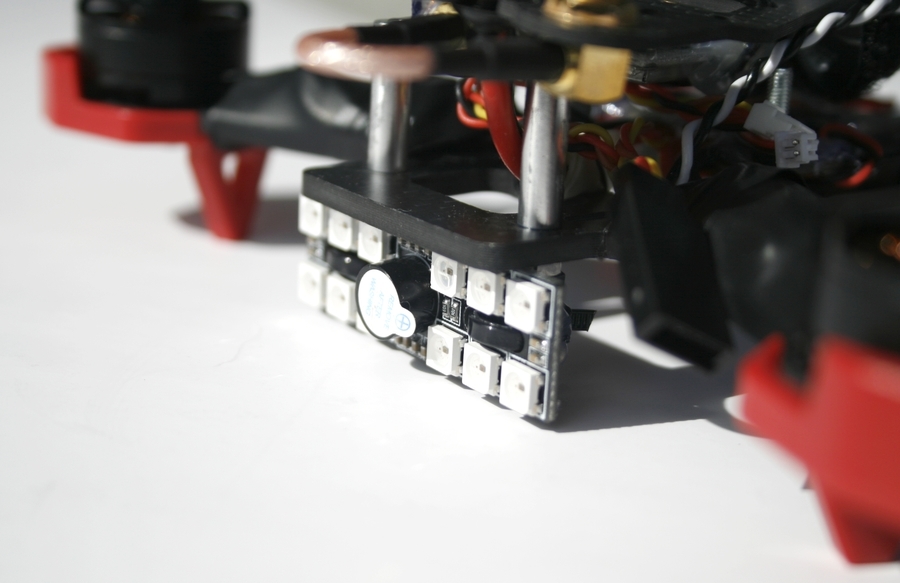
稳压器的三针连接器也必须更换。可以使用四个2针插头,但是我取了两个4针插头,并将所有控制器插入一个“地”,第二根插入信号线(按照连接电动机的顺序)。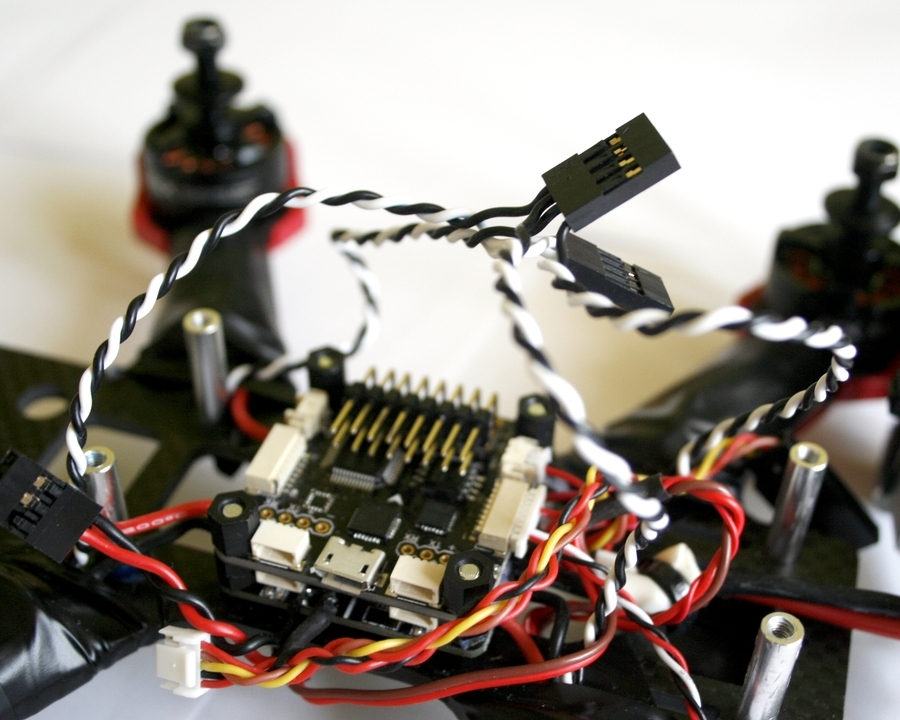 背光板的宽度比框架宽,并在侧面突出。螺旋桨唯一不会撞到的地方是框架下方。我不得不集体耕种:我拿了很长的螺栓,穿上带有预制槽的尼龙接头(以便固定背光灯的扎带),然后将它们穿过底板拧入机架中。他用扎带将带有LED的板拉到最终的支腿上(板上的孔非常合适),并用热胶填充扎带。从板的背面焊接连接器。组装后,在安装阶段,事实证明该尖叫声有问题。连接电池后,它立即开始单调发出吱吱声,如果您从遥控器上激活它,则这种单调的吱吱声也会有节奏地叠加。起初,我在PC上犯了罪,但是用万用表测量电压后,很清楚问题出在哪里。实际上,从一开始就可以将普通的LED连接到高音扬声器导线。结果,我立即订购了几只高音扬声器,听他们的声音,并设置了最大的声音。
背光板的宽度比框架宽,并在侧面突出。螺旋桨唯一不会撞到的地方是框架下方。我不得不集体耕种:我拿了很长的螺栓,穿上带有预制槽的尼龙接头(以便固定背光灯的扎带),然后将它们穿过底板拧入机架中。他用扎带将带有LED的板拉到最终的支腿上(板上的孔非常合适),并用热胶填充扎带。从板的背面焊接连接器。组装后,在安装阶段,事实证明该尖叫声有问题。连接电池后,它立即开始单调发出吱吱声,如果您从遥控器上激活它,则这种单调的吱吱声也会有节奏地叠加。起初,我在PC上犯了罪,但是用万用表测量电压后,很清楚问题出在哪里。实际上,从一开始就可以将普通的LED连接到高音扬声器导线。结果,我立即订购了几只高音扬声器,听他们的声音,并设置了最大的声音。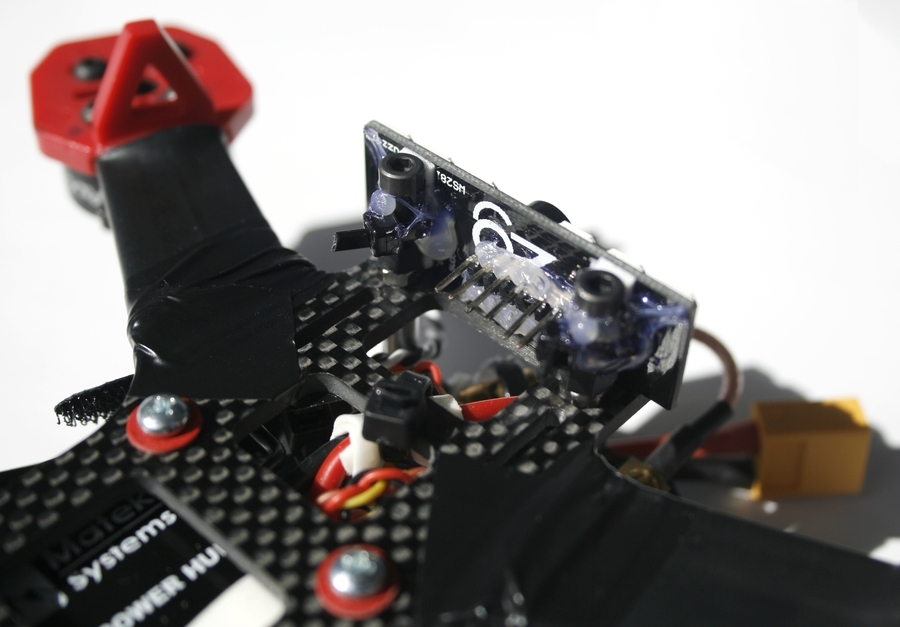
 通常,PDB和控制器是通过尼龙螺栓连接到机架的,但是我不相信它们的强度。所以我用了20mm的金属螺栓和尼龙联轴器。安装PDB之后,我将电源焊接到调节器上(其他导线已预先焊接),并在焊点中填充热胶。我将通向电池的主电源电缆固定在框架上,以免在发生事故时将其撕裂。
通常,PDB和控制器是通过尼龙螺栓连接到机架的,但是我不相信它们的强度。所以我用了20mm的金属螺栓和尼龙联轴器。安装PDB之后,我将电源焊接到调节器上(其他导线已预先焊接),并在焊点中填充热胶。我将通向电池的主电源电缆固定在框架上,以免在发生事故时将其撕裂。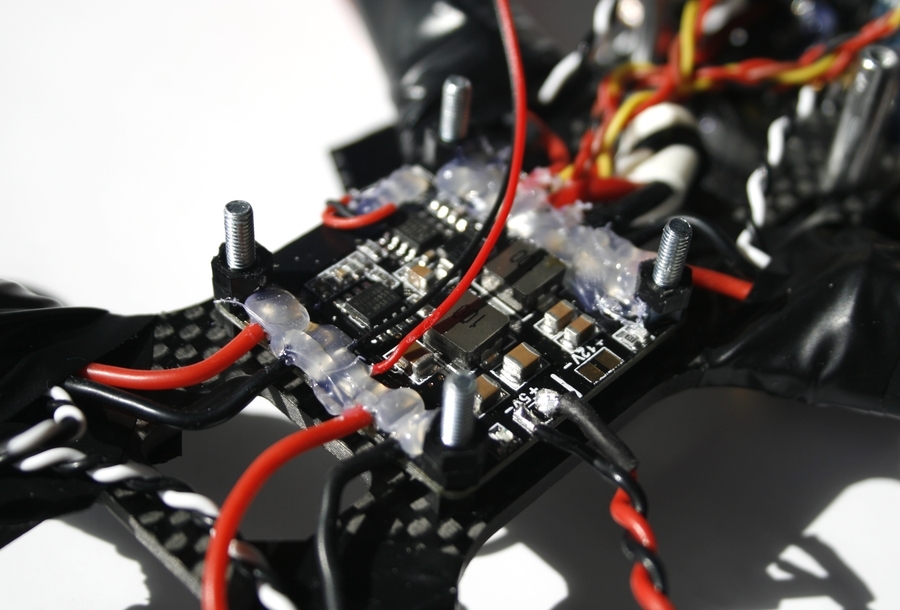 我用一对钳子从接收器上卸下了所有连接器,除了必要的三个外,还直接在板上拆除了第三和第四通道之间的跳线。就像我在上面写的那样,最好选择不带连接器的接收器。我还向他部署了天线并融化成热收缩。在框架上,接收器很好地安装在PBD和后支柱之间。通过这种布置,其指示器清晰可见,并且可以使用装订按钮。
我用一对钳子从接收器上卸下了所有连接器,除了必要的三个外,还直接在板上拆除了第三和第四通道之间的跳线。就像我在上面写的那样,最好选择不带连接器的接收器。我还向他部署了天线并融化成热收缩。在框架上,接收器很好地安装在PBD和后支柱之间。通过这种布置,其指示器清晰可见,并且可以使用装订按钮。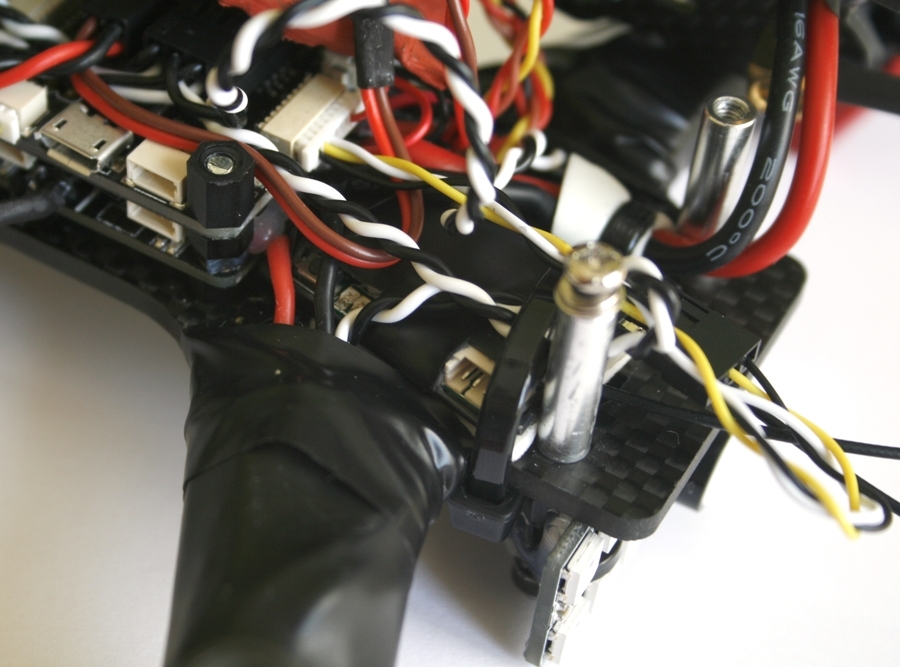 我用扎带和热胶将视频传输器固定在框架的上板上,以便通过插槽可以访问频道切换按钮和LED指示灯。
我用扎带和热胶将视频传输器固定在框架的上板上,以便通过插槽可以访问频道切换按钮和LED指示灯。 框架上有一个特殊的孔,用于固定视频发射器天线。但是请勿将其直接连接到变送器。结果是一种杠杆,其中天线用作一个肩部,发射器本身具有所有导线,而另一根则作为连接器,连接器的连接点将成为支点,这将具有最大的负载。因此,如果发生事故的几率几乎为100%,则发射板上的连接器会断开。因此,您需要通过某种适配器或延长线来安装天线。对于MinimOSD,我决定焊接连接器,而不是直接焊接电线。在论坛上,他们写道,该板经常烧毁,因此,立即准备可能的更换是明智的。我把带有连接器的横杆分成两排,将下部的连接器焊接到带孔的焊盘上,将vIn和vOut引入上部的连接器中。之后,他用热胶填充了焊接位置,然后将整个电路板热收缩。
框架上有一个特殊的孔,用于固定视频发射器天线。但是请勿将其直接连接到变送器。结果是一种杠杆,其中天线用作一个肩部,发射器本身具有所有导线,而另一根则作为连接器,连接器的连接点将成为支点,这将具有最大的负载。因此,如果发生事故的几率几乎为100%,则发射板上的连接器会断开。因此,您需要通过某种适配器或延长线来安装天线。对于MinimOSD,我决定焊接连接器,而不是直接焊接电线。在论坛上,他们写道,该板经常烧毁,因此,立即准备可能的更换是明智的。我把带有连接器的横杆分成两排,将下部的连接器焊接到带孔的焊盘上,将vIn和vOut引入上部的连接器中。之后,他用热胶填充了焊接位置,然后将整个电路板热收缩。 最后一点是电话号码贴纸。如果失去直升机,它将给至少一点希望。
最后一点是电话号码贴纸。如果失去直升机,它将给至少一点希望。 这样的组装结束了。结果紧凑,同时保留了访问所有必要管理机构的权限。在这里可以看到更多照片。。不带电池的quadrocoprera的质量为330g,带电池的质量为470g。而且这没有动作相机,也无法安装。在下一篇文章中,我将讨论固件和调整所得的直升机。
这样的组装结束了。结果紧凑,同时保留了访问所有必要管理机构的权限。在这里可以看到更多照片。。不带电池的quadrocoprera的质量为330g,带电池的质量为470g。而且这没有动作相机,也无法安装。在下一篇文章中,我将讨论固件和调整所得的直升机。 Source: https://habr.com/ru/post/zh-CN395455/
All Articles