机器人学会了玩乐高游戏,看着一个人
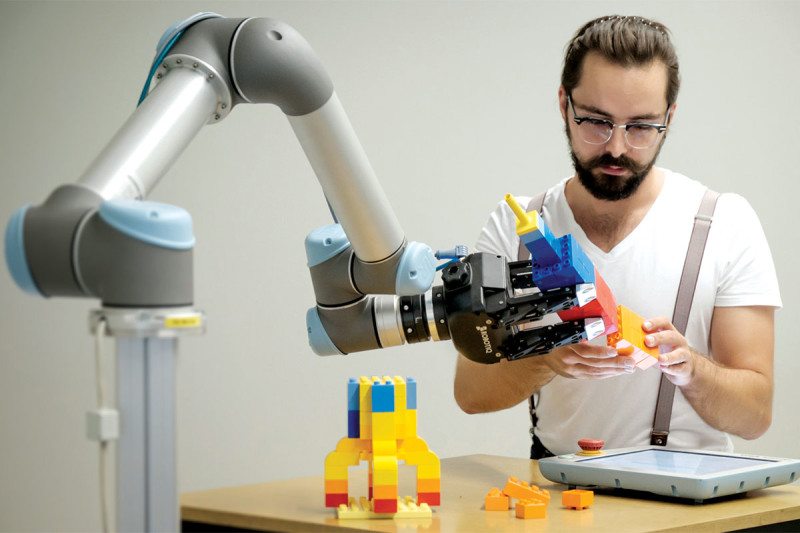 大卫·沃格特(David Vogt)教机器人如何用乐高积木制造火箭(资料来源:亚利桑那州立大学/弗莱堡理工大学)大卫·沃格特(David Vogt)是弗莱堡矿业科技大学的机器人学教授。他有一个喜欢玩乐高积木的儿子,以及这个构造函数的许多细节。一旦科学家提出了这个想法,就可以测试训练机器人组装乐高零件各种模型的可能性。沃格特说:“我和儿子认为,创造一个可以在玩游戏时做我们所做的事情的机器人会很好。由一群同事组成的专家决定为其实验室购买机器人工业机械手。到达学院后,这些机器人配备了Kinect相机。通过使用这台摄像机,机器人可以监视使用标签跟踪运动从乐高积木组装火箭的人。人们多次组装了相同设计的火箭,然后机器人逐渐收到了有关该物体组装过程的越来越多的信息。一段时间后,他能够与人类伴侣互动,帮助他的伴侣组装模型。同时,机器人并不一定总是在需要的地方找到必要的细节,但是他已经知道如何独自寻找它们。根据专家的说法,这只是通过演示人如何执行过程来训练机器人的一个示例。人们通过观察别人而学到的东西没有太多麻烦。例如,儿童仅获得有关世界和他人行为的信息。但是,对机器人进行编程以执行新任务非常困难。我们仅凭直觉就能理解如何完成一项或另一项任务,但是直觉对于机器人是不可用的-必须使用程序严格设置所有动作。但是现在,机器人专家正在尝试掌握一种训练机器人的新方法,该方法是计算机系统通过收集数据库中的观察数据来监视人类行为。一些科学家尝试使用计算机或电话来控制机器人的动作,而另一些科学家则提供他们的病房拥有完全的行动自由,使他们能够从错误中吸取教训。而且,不仅会教机器人如何组装乐高玩具,例如,去年,来自马里兰大学的科学家开始教他们的烹饪系统,使它可以从YouTube观看烹饪视频。Google最近决定使用自学机器人进行自己的实验。为此,购买了工业机械手,并将其连接到单个数据库。记录任何机器人的每个动作,然后通过神经网络处理此数据。经过分析,机器人收到了描述最佳动作算法的指令。系统试图训练的工作是用把手打开一扇门。在其中一项实验中,指示机器人研究各种物体。这些是水壶,文具,书籍。该系统很快就习惯了这项任务,并向其“同事”传送了有关他们的必要动作顺序的信息。在那之后,系统被赋予了新任务-将特定对象移动到指定点。机器人没有收到有关对象特征的任何指令,并且对象不断变化。事实证明,机器人可以利用研究此类对象期间积累的数据来很好地完成此类任务。机器设法计算出将物体移到表面上所需位置的后果。至于开门,在一种情况下,有人帮助机器人。其他机器从与人类伙伴互动的机器人那里接收训练所需的数据,然后使用此信息重复“同事”的动作。事实证明,随着时间的流逝,这些系统通过反复试验得到了非常有效的训练。机械手开始用不同类型的手柄打开门而没有问题后,工作条件发生了变化。例如,门的位置,门的打开角度等发生了变化。在最后的实验中,事实证明,机器人可以在没有人工帮助的情况下打开门和锁,而这是他们尚未遇到的。一位Google开发人员说:“当我们执行某些动作时,我们通常会凭直觉采取行动,也许可以将这种直觉传递给机器人,从而使机器人学习和工作更快。”这种机器人训练的问题之一是将信息转换成机器可以理解的形式。大多数机器人没有让他们像人类一样感知环境和其中发生的现象的传感器。因此,此类信息必须每次都适用于机器人及其控制系统。瑞士洛桑联邦理工学院的奥德·比拉德(Aude Billard)说:“一位优秀的机器人老师知道他正在使用一种具有不同方式感知周围现实的机器。”大卫·沃格特(David Vogt)和他的团队相信,人类可以通过展示自己的行为来训练机器人。也许这种培训方法可以在企业中使用。因此,无需使用程序员的工作就可以对机器人系统进行新功能的培训。因此,普通工人将能够向机器人展示需要完成的工作,然后他将开始为自己执行新工作。“理想情况下,人类和机器人应该能够执行他们无法单独执行的动作,”沃格特说。教授及其同事很快将在墨西哥坎昆举行的国际人形机器人会议上介绍这一结果。
大卫·沃格特(David Vogt)教机器人如何用乐高积木制造火箭(资料来源:亚利桑那州立大学/弗莱堡理工大学)大卫·沃格特(David Vogt)是弗莱堡矿业科技大学的机器人学教授。他有一个喜欢玩乐高积木的儿子,以及这个构造函数的许多细节。一旦科学家提出了这个想法,就可以测试训练机器人组装乐高零件各种模型的可能性。沃格特说:“我和儿子认为,创造一个可以在玩游戏时做我们所做的事情的机器人会很好。由一群同事组成的专家决定为其实验室购买机器人工业机械手。到达学院后,这些机器人配备了Kinect相机。通过使用这台摄像机,机器人可以监视使用标签跟踪运动从乐高积木组装火箭的人。人们多次组装了相同设计的火箭,然后机器人逐渐收到了有关该物体组装过程的越来越多的信息。一段时间后,他能够与人类伴侣互动,帮助他的伴侣组装模型。同时,机器人并不一定总是在需要的地方找到必要的细节,但是他已经知道如何独自寻找它们。根据专家的说法,这只是通过演示人如何执行过程来训练机器人的一个示例。人们通过观察别人而学到的东西没有太多麻烦。例如,儿童仅获得有关世界和他人行为的信息。但是,对机器人进行编程以执行新任务非常困难。我们仅凭直觉就能理解如何完成一项或另一项任务,但是直觉对于机器人是不可用的-必须使用程序严格设置所有动作。但是现在,机器人专家正在尝试掌握一种训练机器人的新方法,该方法是计算机系统通过收集数据库中的观察数据来监视人类行为。一些科学家尝试使用计算机或电话来控制机器人的动作,而另一些科学家则提供他们的病房拥有完全的行动自由,使他们能够从错误中吸取教训。而且,不仅会教机器人如何组装乐高玩具,例如,去年,来自马里兰大学的科学家开始教他们的烹饪系统,使它可以从YouTube观看烹饪视频。Google最近决定使用自学机器人进行自己的实验。为此,购买了工业机械手,并将其连接到单个数据库。记录任何机器人的每个动作,然后通过神经网络处理此数据。经过分析,机器人收到了描述最佳动作算法的指令。系统试图训练的工作是用把手打开一扇门。在其中一项实验中,指示机器人研究各种物体。这些是水壶,文具,书籍。该系统很快就习惯了这项任务,并向其“同事”传送了有关他们的必要动作顺序的信息。在那之后,系统被赋予了新任务-将特定对象移动到指定点。机器人没有收到有关对象特征的任何指令,并且对象不断变化。事实证明,机器人可以利用研究此类对象期间积累的数据来很好地完成此类任务。机器设法计算出将物体移到表面上所需位置的后果。至于开门,在一种情况下,有人帮助机器人。其他机器从与人类伙伴互动的机器人那里接收训练所需的数据,然后使用此信息重复“同事”的动作。事实证明,随着时间的流逝,这些系统通过反复试验得到了非常有效的训练。机械手开始用不同类型的手柄打开门而没有问题后,工作条件发生了变化。例如,门的位置,门的打开角度等发生了变化。在最后的实验中,事实证明,机器人可以在没有人工帮助的情况下打开门和锁,而这是他们尚未遇到的。一位Google开发人员说:“当我们执行某些动作时,我们通常会凭直觉采取行动,也许可以将这种直觉传递给机器人,从而使机器人学习和工作更快。”这种机器人训练的问题之一是将信息转换成机器可以理解的形式。大多数机器人没有让他们像人类一样感知环境和其中发生的现象的传感器。因此,此类信息必须每次都适用于机器人及其控制系统。瑞士洛桑联邦理工学院的奥德·比拉德(Aude Billard)说:“一位优秀的机器人老师知道他正在使用一种具有不同方式感知周围现实的机器。”大卫·沃格特(David Vogt)和他的团队相信,人类可以通过展示自己的行为来训练机器人。也许这种培训方法可以在企业中使用。因此,无需使用程序员的工作就可以对机器人系统进行新功能的培训。因此,普通工人将能够向机器人展示需要完成的工作,然后他将开始为自己执行新工作。“理想情况下,人类和机器人应该能够执行他们无法单独执行的动作,”沃格特说。教授及其同事很快将在墨西哥坎昆举行的国际人形机器人会议上介绍这一结果。Source: https://habr.com/ru/post/zh-CN398751/
All Articles