! SLAM
Hector SLAM. ROS. ,
Hokuyo URG-04LX-UG01 gmapping amcl.
laser_scan_matcher. , .
laser_scan_matcher
, ! ROS Indigo, ROS (Jade, Kinetic, Hydro). ( ROS Kinetic apt-get).
laser_scan_matcher , Canonical Scan Matcher,
.
. , .
:
sudo apt-get install ros-indigo-laser-scan-matcher
:
roscore
roslaunch laser_scan_matcher demo.launch
rviz:
laser_scan_matcher , bag . . , gmapping. my_gmapping_launch.launch gmapping:
cd ~/catkin_ws/src
catkin_create_pkg my_laser_matcher
cd src/my_laser_matcher
mkdir launch
vim launch/my_gmapping_launch.launch
my_gmapping_launch.launch:
my_gmapping_launch.launch<?xml version="1.0"?>
<launch>
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser"
args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /laser 40" />
<node pkg="laser_scan_matcher" type="laser_scan_matcher_node" name="laser_scan_matcher_node" output="screen">
<param name="fixed_frame" value = "odom"/>
<param name="use_odom" value="true"/>
<param name="publish_odom" value = "true"/>
<param name="use_alpha_beta" value="true"/>
<param name="max_iterations" value="10"/>
</node>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="map_udpate_interval" value="1.0"/>
<param name="delta" value="0.02"/>
</node>
</launch>
static_transform_publisher tf base_link → laser, laser_scan_matcher slam_gmapping.
. Hokuyo ROS
hokuyo_node:
sudo apt-get install ros-indigo-hokuyo-node
getID hokuyo_node :
rosrun hokuyo_node getID /dev/ttyACM0
:
Error: Failed to open port. Permission denied.
[ERROR] 1263843357.793873000: Exception thrown while opening Hokuyo.
Failed to open port: /dev/ttyACM0. Permission denied (errno = 13). You probably don't have premission to open the port for reading and writing. (in hokuyo::laser::open) You may find further details at http://www.ros.org/wiki/hokuyo_node/Troubleshooting
/dev/ttyACM0:
sudo chmod a+rw /dev/ttyACM0
getID hokuyo_node :
Device at /dev/ttyACM0 has ID H0906078
hokuyo_node:
rosrun hokuyo_node hokuyo_node
my_gmapping_launch.launch:
roslaunch my_laser_matcher my_gmapping_launch.launch
rosrun rviz rviz
:
rostopic list
:
/initialpose
/move_base_simple/goal
/odom
/pose2D
...
/imu/data
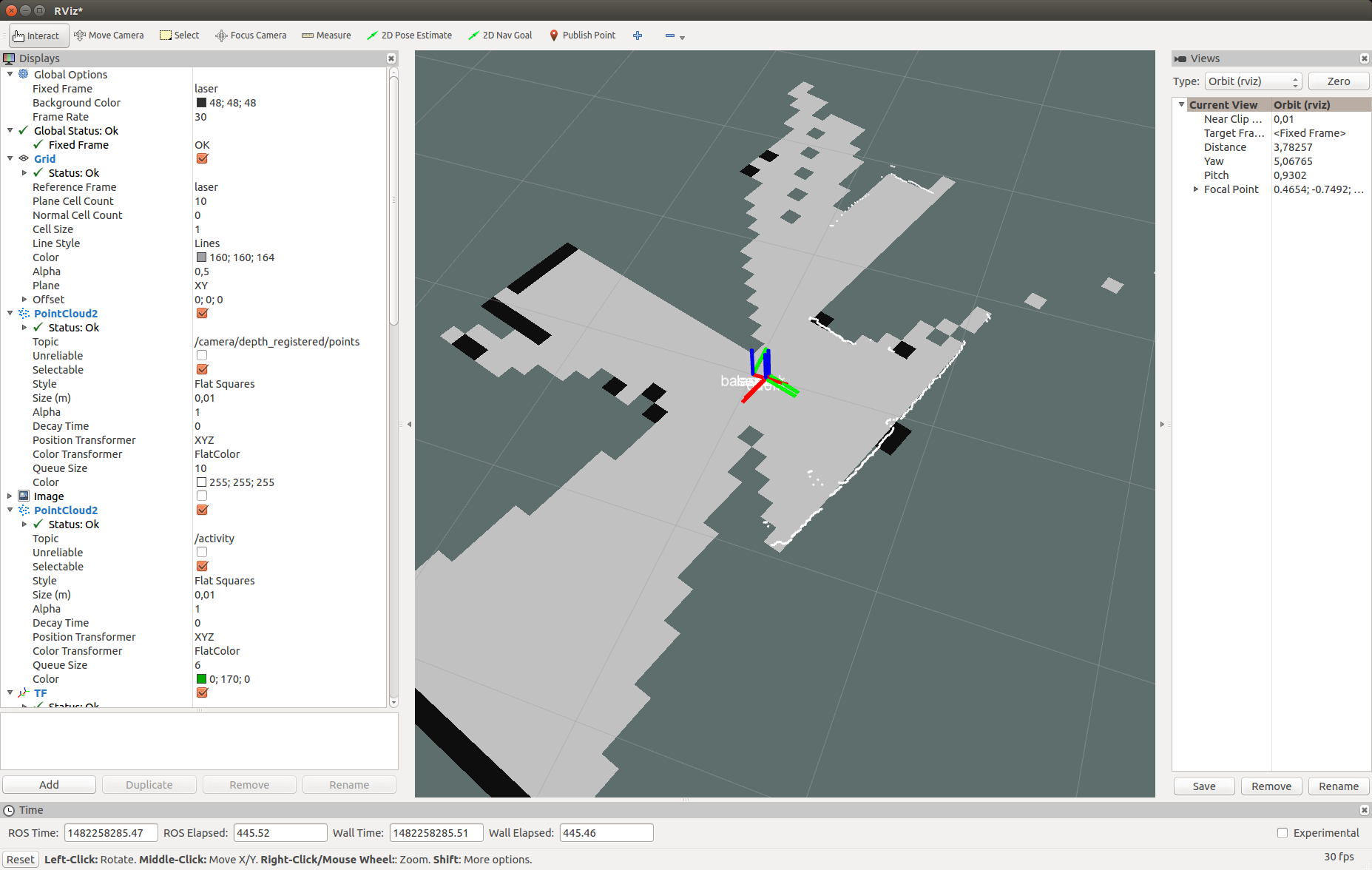
laser_scan_matcher.
rviz LaserScan /scan ,
. Map TF. TF Frames, : odom, map, base_link. , , . /map Fixed frame Displays Global options.
rviz :
. map_saver map_server :
rosrun map_server map_saver
amcl
amcl. my_localize.launch :
my_localize.launch<launch>
<param name="/use_sim_time" value="false"/>
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser"
args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /laser 40" />
<node name="hokuyo" pkg="hokuyo_node" type="hokuyo_node" respawn="false" output="screen">
<param name="calibrate_time" type="bool" value="false"/>
<param name="port" type="string" value="/dev/ttyACM0"/>
<param name="intensity" type="bool" value="false"/>
</node>
<node pkg="laser_scan_matcher" type="laser_scan_matcher_node"
name="laser_scan_matcher_node" output="screen">
<param name="fixed_frame" value = "odom"/>
<param name="use_alpha_beta" value="true"/>
<param name="max_iterations" value="10"/>
</node>
<node name="map_server" pkg="map_server" type="map_server" args="/home/vladimir/catkin_ws/map.yaml"/>
<node pkg="amcl" type="amcl" name="amcl" output="screen" >
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/>
<param name="base_frame_id" type="str" value="base_link" />
<param name="global_frame_id" type="str" value="map" />
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<param name="use_map_topic" value="true" />
<param name="first_map_only" value="true" />
</node>
</launch>
gmapping /laser → /base_link static_transform_publisher, hokuyo_node laser_scan_matcher. map_server , args yaml. amcl . amcl
.
github . :
roslaunch my_laser_matcher my_localize.launch
rviz. map Fixed frame Global options. :
rostopic list
:
...
/amcl/parameter_descriptions
/amcl/parameter_updates
/amcl_pose
...
/map
/map_metadata
/map_updates
...
/particlecloud
amcl_pose , amcl.
:
rostopic echo /amcl_pose
:
header:
seq: 15
stamp:
secs: 1482430591
nsecs: 39625000
frame_id: map
pose:
pose:
position:
x: 0.781399671581
y: 0.273353260585
z: 0.0
orientation:
x: 0.0
y: 0.0
z: -0.636073020536
w: 0.771628869694
covariance: [0.2187289446708912, -0.010178711317316846, 0.0, 0.0, 0.0, 0.0, -0.010178711317316819, 0.23720047371620548, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.07106236846890918]
---
rviz :

. :

. rviz. amcl . 2D Pose Estimate. rviz 2D Pose Estimate, rviz ( base_link) . , :

() . .

, my_localize.launch:
[ INFO] [1482431993.717411186]: Setting pose (1482431993.717383): -0.413 -0.071 0.057
:
/particlecloud (Pose) . — geometry_msgs/PoseArray.
/particlecloud:
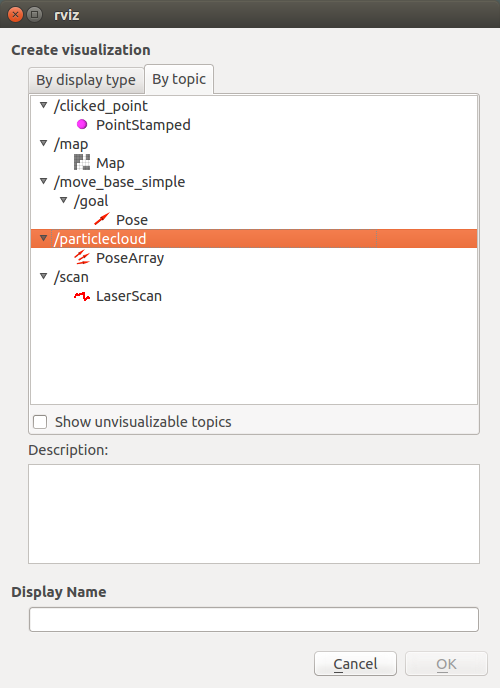
rviz :

, . 2D Pose estimate, amcl
ros.org.
! (gmapping amcl) Navigation stack ROS, . laser_scan_matcher, gmapping amcl. , .
ROS ROS. !
PS: 2017 !